 在英偉達Thor平臺部署EtherCAT主站:實測高性能、低抖動與低占用
在英偉達Thor平臺部署EtherCAT主站:實測高性能、低抖動與低占用

在機器人與邊緣AI應用中,底層通信的實時性決定了系統的響應速度與控制精度。Jetson Thor作為NVIDIA最新一代嵌入式平臺,具備強大的算力與實時推理能力,為EtherCAT網絡提供了理想的硬件基礎。
通過部署acontis EC-Master主站協議棧,并結合實時內核與優化驅動,我們在Jetson Thor上實現了低抖動、低CPU占用的EtherCAT通信性能,適用于高精度同步控制場景。
一、部署方案:驅動替換與實時內核配置
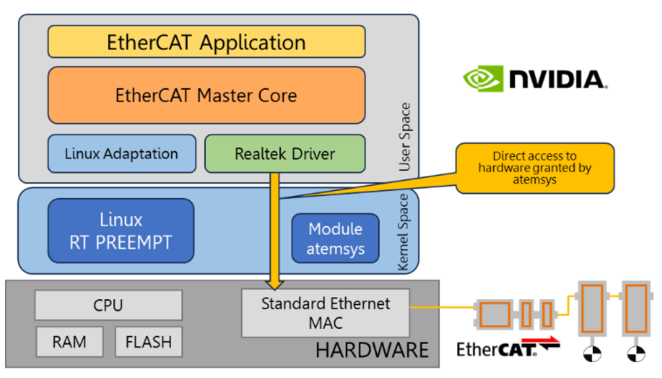
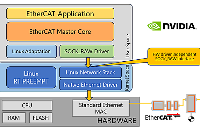
為實現高性能EtherCAT通信,我們在Jetson Thor上采用了acontis提供的實時以太網驅動,并啟用了Linux RT PREEMPT內核。Jetson Thor搭載的Realtek網卡默認使用標準驅動,為降低通信抖動并提升確定性,我們將其替換為acontis實時驅動,并通過atemsys模塊實現用戶態對網卡的直接訪問。
操作步驟包括:
- 將標準驅動加入黑名單,避免系統自動加載:

- 加載acontis提供的atemsys模塊(需聯系盟通科技獲取且保存至工作目錄):

完成上述配置后,EtherCAT主站協議棧即可通過優化驅動直接訪問網卡,實現更高效的幀處理與更穩定的周期控制。系統架構如下圖所示:
二、操作步驟詳解
1、環境準備
完成驅動替換與實時內核配置后,我們通過EC-Master示例程序EcMasterDemoDc啟動EtherCAT主站功能。測試環境包括Jetson AGX Thor(JetPack 7.0)、Linux RT PREEMPT內核、Beckhoff從站設備以及預先生成的ENI配置文件。
2、啟動命令

3、參數說明:
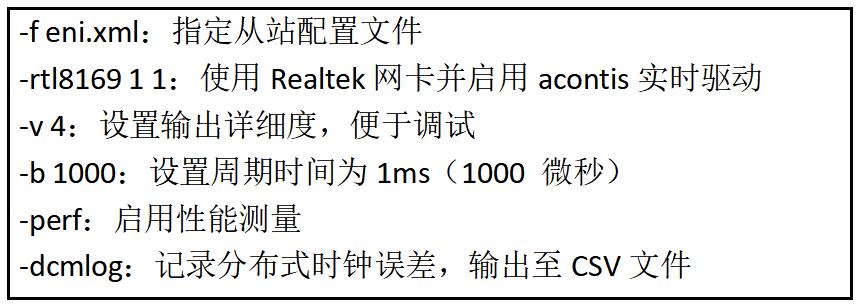
4、性能實測結果
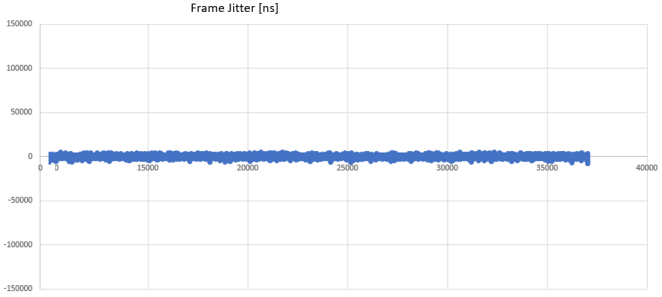
在1ms周期配置下,系統運行穩定,EtherCAT主站協議棧的CPU占用率僅為1.38%。周期性數據幀的抖動控制在±6μs范圍內,且分布式時鐘誤差圖中未出現明顯峰值,表明系統整體表現出良好的同步性與確定性。
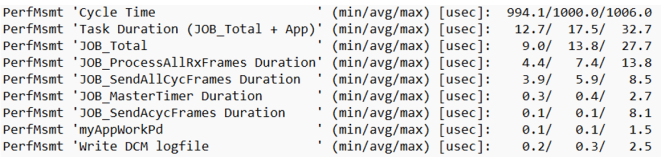
關鍵指標如下:
- 周期時間偏差(min/avg/max):994.1 / 1000.0 / 1006.0 μs
- 主站任務總耗時(含應用層):平均 17.5 μs
- EC-Master 核心任務耗時:平均13.8 μs
- 抖動范圍:±6 μs
- CPU 占用率:約1.38%
除了1ms周期測試,我們還嘗試了250μs周期配置,系統同樣保持穩定運行,主站任務平均耗時約13.5μs,占用周期時間的5.4%。這表明EC-Master在Jetson Thor上具備處理更高頻率控制任務的能力。
上述結果表明,在Jetson Thor平臺上部署EC-Master主站協議棧,結合實時內核與優化驅動后,可實現高精度、低延遲的EtherCAT通信性能,滿足同步控制場景的實際需求。
三、常見問題解答(Q&A)
Q1:這種EtherCAT主站方案適用于哪些場景?
A1:適用于對同步精度和通信穩定性有較高要求的控制系統,例如人形機器人、智能制造、醫療輔助設備、運動控制平臺等。在周期時間低至 250μs 的配置下,系統仍能穩定運行,適合高頻率任務。
Q2:低延時和低抖動意味著什么?
A2:意味著主站能更快響應從站數據變化,控制指令更精準,系統整體更穩定。在實際應用中,這直接影響執行器的動作精度、傳感器數據的時效性,以及多設備之間的同步協調能力。
Q3:部署這套方案有哪些意義?
A3:通過在Jetson Thor上部署EC-Master主站協議棧,開發者可以實現高精度、低延遲的EtherCAT通信能力,為復雜控制任務提供穩定可靠的底層支撐。這不僅提升了系統響應速度,也為多設備同步、實時數據采集等場景奠定了基礎。如需進一步了解部署細節或平臺適配情況,歡迎聯系盟通科技,我們可協助確認相關技術方案。
四、總結
Jetson Thor + EC-Master的組合,為開發者提供了一個靈活、可擴展的EtherCAT主站平臺。通過在Jetson Thor上部署EC-Master主站協議棧并結合實時優化配置,開發者可以在嵌入式平臺上實現穩定、高效的EtherCAT通信能力,為復雜控制系統打下堅實基礎。
-
機器人
+關注
關注
213文章
31310瀏覽量
223352 -
英偉達
+關注
關注
23文章
4111瀏覽量
99559 -
EtherCAT主站
+關注
關注
2文章
35瀏覽量
4491
發布評論請先 登錄
在高性能 AI 平臺上部署 EtherCAT 主站:實測低抖動、低占用方案

基于全志T507-H的Igh EtherCAT主站案例分享
【昉·星光 2 高性能RISC-V單板計算機體驗】EtherCAT主站
深度解析 | 低抖動高精度EtherCAT多軸控制的實現與實踐案例
【MYS-6ULX-IOT試用申請】基于I.MX 6UL的EtherCAT從站的設計
基于賽靈思FPGA的EtherCAT主站運動控制
EtherCAT通信開發平臺包括應用手冊
低占用空間的PROFINET通信開發平臺
開源!ZYNQ IgH EtherCAT主站方案分享

英偉達智能駕駛的核心芯片——Thor

瑞芯微RK3506開發板Ethercat主站適配開發詳細攻略,實測微秒級抖動延遲!

在英偉達Thor平臺部署EtherCAT主站:實測高性能、低抖動與低占用



 工商網監
工商網監
評論