 SD NAND 接口協議解析:SPI 與 SDIO 模式區別及適配方法
SD NAND 接口協議解析:SPI 與 SDIO 模式區別及適配方法

在嵌入式存儲開發中,工程師常會糾結:SD NAND該用 SPI模式還是 SDIO模式?兩種接口協議到底有什么區別?為什么同樣的芯片換種模式就會出現讀寫失敗?本文從協議本質入手,用通俗語言拆解 SPI與 SDIO模式的核心差異,結合SD NAND的適配特點,講清不同場景下的選擇邏輯和實戰方法,幫你避開協議適配的常見坑點。
一、先搞懂基礎:接口協議是 “設備溝通的語言”
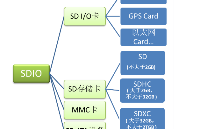
SD NAND之所以能被 STM32、GD32等 MCU控制,核心是通過 “接口協議”建立溝通規則 ——就像兩個人交流需要共同語言,SPI和 SDIO就是 SD NAND與 MCU之間的兩種 “語言體系”。
簡單說,SPI是 “簡單口語”:語法簡單、詞匯少,適合對溝通速度要求不高的場景;SDIO是 “專業術語”:語法復雜、效率高,能快速傳輸大量數據。兩種模式下,SD NAND的硬件結構完全相同,只是 “說話方式”不同,這也是為什么同一顆米客方德 SD NAND可以切換兩種模式工作。
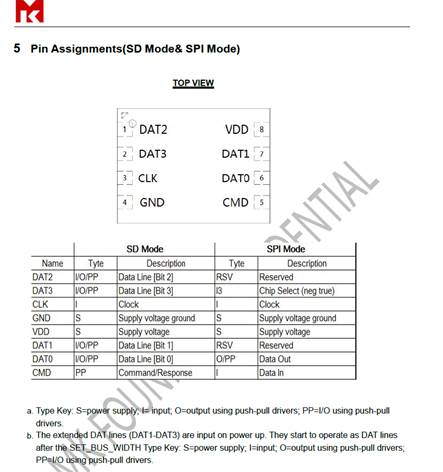
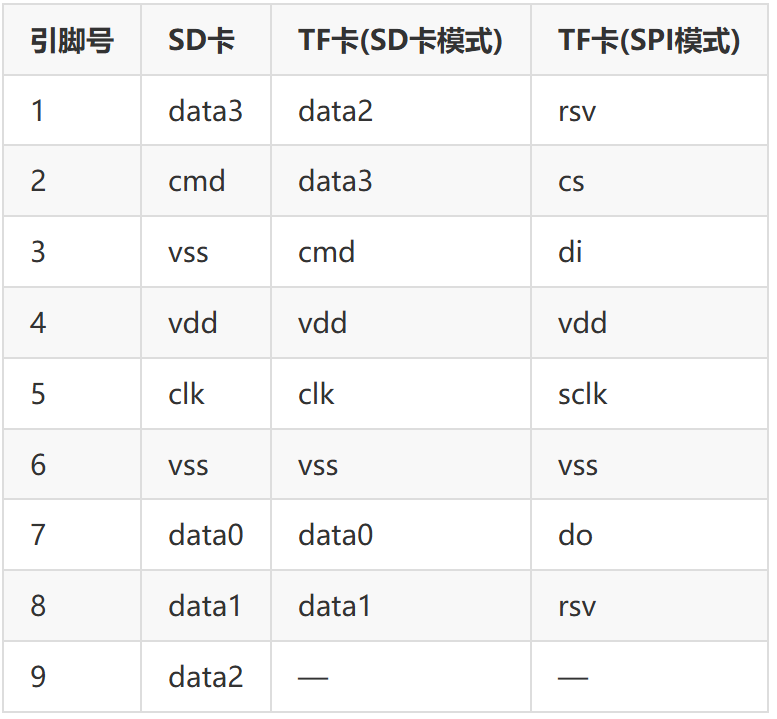
從硬件上看,兩種模式共用部分引腳(如電源、地線),但信號引腳有差異:
SPI模式只需 4根線:CS(片選)、SCK(時鐘)、MOSI(主發從收)、MISO(主收從發);
SDIO模式需要 6根線:CMD(命令線)、CLK(時鐘)、D0-D3(4 根數據線),支持 “并行傳輸”。
這就像 SPI是 “單車道”,一次只能傳 1位數據;SDIO是 “4車道”,一次能傳 4位數據,速度自然更快 ——這是兩者最核心的區別。
二、SPI與 SDIO模式的 5大核心區別:從速度到適配場景
要選對模式,先看清兩者在關鍵指標上的差異。以下結合米客方德 8Gb SD NAND(型號 MKDV8GIL-AST)的實測數據,對比核心維度:
| 對比維度 | SPI模式 | SDIO模式 |
|---|---|---|
| 最大傳輸速度 | 約 20-50MB/s(受限于單車道傳輸) | 約 50-100MB/s(4車道并行,米客方德實測達 91MB/s) |
| 引腳數量 | 4根(簡單,適合引腳緊張的 MCU) | 6根(需額外引腳,適合資源充足的 MCU) |
| 兼容性 | 幾乎所有帶 SPI接口的 MCU 都支持(如 STM32F103) | 僅支持 SDIO接口的 MCU(如 STM32F407) |
| 開發難度 | 低(指令少,邏輯簡單,新手 1天可上手) | 中(需處理復雜命令集和時序,依賴成熟庫) |
| 適用場景 | 智能門鎖、傳感器等小數據量場景 | 行車記錄儀、高清攝像頭等大數據量場景 |
1.速度差異:為什么 SDIO 比 SPI快?
SPI模式下,數據傳輸是 “串行”的 ——每時鐘周期只能傳 1位數據(比如 0或 1),就像用吸管喝飲料,一次只能吸一口;而 SDIO模式支持 “4位并行傳輸”,每時鐘周期能傳 4位數據,相當于 4根吸管同時喝,速度自然翻倍。
米客方德 SD NAND在兩種模式下的實測速度對比很明顯:同一顆芯片,SPI模式順序讀取速度約 35MB/s,切換到 SDIO模式后可達 91MB/s,對需要存儲高清視頻的車載設備來說,這種速度差異直接決定了是否會出現 “卡頓丟幀”。
2.兼容性:不是所有 MCU都能 “說 SDIO語言”
SPI是單片機的 “通用語言”,幾乎所有 MCU(從入門級的 STM32F103到高端的 STM32H7)都帶 SPI接口,就像普通話人人會說;而 SDIO是 “專業語言”,只有中高端 MCU(如 STM32F4、F7系列)才帶 SDIO接口,低端 MCU根本 “聽不懂”。
這也是為什么米客方德在設計 SD NAND時,默認兼容 SPI模式 ——確保即使是最基礎的嵌入式設備,也能輕松驅動,而 SDIO模式則作為 “高性能選項”,供有需求的場景啟用。
3.開發難度:SPI像 “搭積木”,SDIO像 “拼樂高”
SPI模式的指令集非常簡單,核心指令只有 “讀”(0x13)、“寫”(0x02)、“擦除”(0xD8)等十幾種,就像用幾個基礎積木就能搭出造型;而 SDIO模式遵循 SD協議規范,有上百條命令(如 CMD0初始化、CMD17讀單塊),還需要處理 CRC校驗、狀態響應等復雜邏輯,就像拼精密樂高,一步錯就可能整體失敗。
好在米客方德提供了兩種模式的參考代碼:SPI模式的驅動代碼只有 300多行,新手照葫蘆畫瓢就能用;SDIO模式則適配了 ST的 HAL庫,直接調用HAL_SD_ReadBlocks()等現成函數,能大幅降低開發難度。
三、實戰適配:SPI與 SDIO模式的接線與初始化方法
選對模式后,關鍵是做好硬件接線和軟件初始化。以下以米客方德 SD NAND為例,分步驟講解兩種模式的適配要點。
1. SPI模式適配:4線接線 + 3步初始化
硬件接線(以 STM32F103為例)
米客方德 SD NAND的 SPI引腳定義清晰,接線時只需對應連接:
SD NAND的 CS接 STM32的 PA4(GPIO引腳,用于片選);
SCK接 STM32的 PA5(SPI1_SCK時鐘線);
MOSI接 STM32的 PA7(SPI1_MOSI主機發送線);
MISO接 STM32的 PA6(SPI1_MISO主機接收線);
VCC接 3.3V電源,GND 接地線(注意:絕對不能接 5V,會燒毀芯片)。
軟件初始化 3步走
SPI模式的初始化邏輯簡單,核心是讓 SD NAND進入 “可通信狀態”:
c
運行
//步驟 1:配置 SPI接口(STM32側)
HAL_SPI_Init(&hspi1); //配置 SPI時鐘極性 0、相位 0,波特率 10MHz
//步驟 2:發送初始化指令(喚醒 SD NAND)
SD_NAND_CS_LOW(); //拉低片選,選中芯片
HAL_SPI_Transmit(&hspi1, 0xAB, 1, 100); //發送喚醒指令
HAL_SPI_Receive(&hspi1, &resp, 1, 100); //接收響應(0x01表示就緒)
SD_NAND_CS_HIGH();
//步驟 3:驗證連接(讀 ID確認芯片型號)
SD_NAND_CS_LOW();
HAL_SPI_Transmit(&hspi1, 0x9F, 1, 100); //讀 ID指令
HAL_SPI_Receive(&hspi1, id, 3, 100); // 米客方德廠商 ID為 0x92
SD_NAND_CS_HIGH();
米客方德 SD NAND的 SPI初始化成功率接近 100%,很少出現 “喚醒失敗”,新手按此步驟操作,10分鐘就能完成初始化。
2. SDIO模式適配:6線接線 +依賴庫函數
硬件接線(以 STM32F407為例)
SDIO模式需要 6根線,接線時注意數據線的對應:
SD NAND的 CMD接 STM32的 PD2(SDIO_CMD命令線);
CLK接 STM32的 PC12(SDIO_CLK時鐘線);
D0接 STM32的 PC8,D1接 PC9,D2接 PC10,D3接 PC11(4根數據線);
電源和地線同 SPI模式(3.3V供電)。
軟件初始化:依賴 HAL庫簡化操作
SDIO模式的初始化復雜,建議直接用 STM32的 HAL庫函數,核心步驟:
c
運行
//步驟 1:初始化 SDIO接口
HAL_SD_Init(&hsd); //配置時鐘 48MHz,總線寬度 4位(D0-D3)
//步驟 2:檢測卡并初始化
HAL_SD_GetCardInfo(&hsd, &card_info); //獲取卡信息(容量、類型等)
//步驟 3:驗證讀寫(讀一個扇區測試)
uint8_t buf[512];
HAL_SD_ReadBlocks(&hsd, buf, 0x00, 1, 1000); //讀 0扇區數據
米客方德 SD NAND對 SDIO 協議的兼容性做了優化,能快速通過 HAL庫的初始化檢測,不像有些品牌需要反復調試時序參數。
四、模式選擇指南:3個維度判斷用 SPI還是 SDIO
實際開發中,兩種模式沒有絕對優劣,關鍵看場景適配。結合米客方德的客戶案例,總結出 3個判斷維度:
1.看設備 “數據量”:小數據用 SPI,大數據用 SDIO
如果設備只是存儲少量日志(如智能門鎖的開鎖記錄,每天幾十 KB),SPI模式完全夠用,還能省引腳;
如果是存儲高清視頻(如行車記錄儀每秒 10MB數據),必須用 SDIO模式,否則會因速度不夠導致數據丟失。米客方德的車載級 SD NAND就常搭配 SDIO模式,確保 4K視頻連續錄制不卡頓。
2.看 MCU “接口資源”:低端用 SPI,高端用 SDIO
若用 STM32F103、GD32F130等低端 MCU(只有 SPI接口),只能選 SPI模式;
若用 STM32F407、NXP i.MX RT等中高端 MCU(帶 SDIO接口),且需要高速傳輸,優先選 SDIO模式。
3.看開發 “時間成本”:趕進度用 SPI,求性能用 SDIO
SPI模式的驅動開發最快 1天就能完成,適合項目周期緊的場景;SDIO模式雖然速度快,但調試周期可能長達 3-5天(需處理各種協議細節)。米客方德提供的 SDIO例程已在多個平臺驗證過,能將調試時間壓縮到 1天內。
五、避坑指南:兩種模式的 4個常見錯誤及解決方法
1. SPI模式:數據讀寫錯位?檢查 “地址對齊”
新手常犯的錯誤是 “扇區地址沒對齊”(比如寫地址 0x123而非 0x200的整數倍),導致數據錯位。解決方法:在驅動里強制地址對齊,確保addr % 512 == 0(1扇區 = 512字節)。米客方德的 SPI驅動例程里自帶地址校驗功能,能自動規避這個問題。
2. SDIO模式:初始化失敗?排查 “時鐘頻率”
SDIO模式對時鐘頻率敏感,若初始化時時鐘超過 400kHz(卡識別階段的限制),會導致卡不響應。解決方法:初始化階段用 100-400kHz時鐘,識別成功后再切換到 48MHz高速模式。米客方德的 datasheet里附有詳細的時鐘配置步驟,按文檔操作即可避免。
3.兩種模式:通信不穩定?查 “電源濾波”
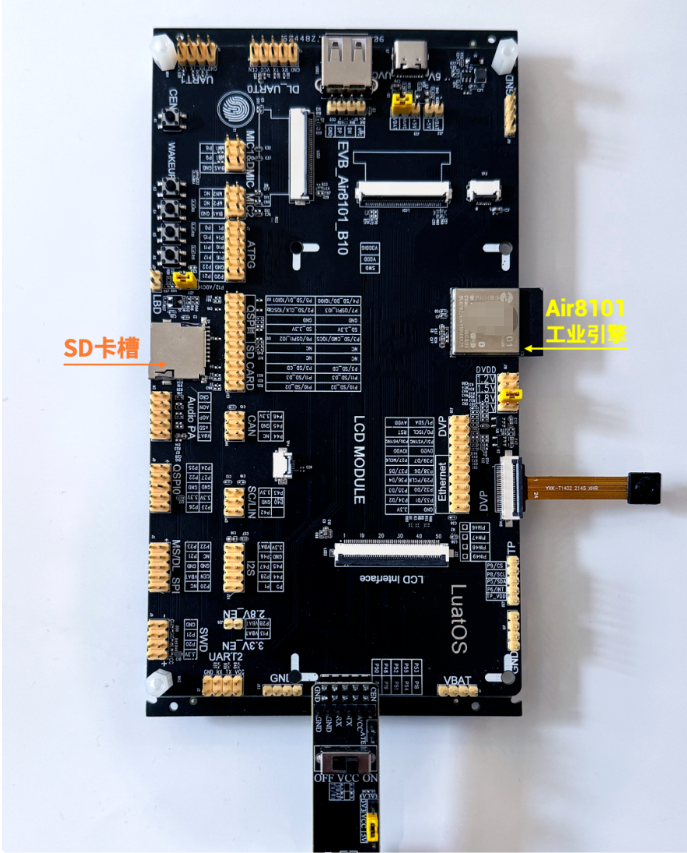
SD NAND對電源噪聲敏感,若電源波動大,兩種模式都會出現讀寫錯誤。解決方法:在 VCC引腳旁并聯 1個 104電容(0.1μF)濾波,米客方德的評估板已集成濾波電路,參考其設計可大幅提升穩定性。
4.模式切換:換模式后芯片不工作?重新 “喚醒初始化”
同一顆 SD NAND從 SPI切換到 SDIO模式時,必須重新上電并執行初始化流程,否則會因模式沖突導致不響應。米客方德的芯片支持 “熱切換”,但建議實際開發中通過硬件復位引腳(若有)強制重啟,確保模式切換可靠。
六、協議只是工具,適配場景才是關鍵
SPI和 SDIO模式就像 SD NAND的 “兩副面孔”:SPI簡單易用,適合小數據、低資源場景;SDIO高速高效,適合大數據、高性能需求。米客方德 SD NAND之所以能在兩種模式下都表現穩定,核心是其控制器對協議細節做了深度優化 ——無論是 SPI的指令兼容性,還是 SDIO的時序匹配,都經過大量場景驗證。
最后提醒:選型時不必盲目追求 “高速模式”,先明確設備的數據量、MCU資源和開發周期,再結合本文的適配方法,就能讓 SD NAND發揮最佳性能。如果仍有疑問,米客方德提供的技術手冊里有更詳細的模式切換指南和驅動代碼,新手可直接參考復用。
審核編輯 黃宇
-
接口
+關注
關注
33文章
9546瀏覽量
157204 -
SPI
+關注
關注
17文章
1886瀏覽量
101456 -
SD NAND
+關注
關注
0文章
117瀏覽量
1844
發布評論請先 登錄
從NOR Flash 到 NAND Flash 和SD NAND,從底層結構到應用差異

SD NAND 為何不能存啟動代碼,SPI NAND 與 NOR Flash 卻可以 —— 接口、傳輸、啟動機制全對比

ESP32 驅動瀚海微SD NAND 完整方案 + FAT/FAT32 驅動核心區別

SPI NOR Flash和SPI NAND Flash存儲芯片的區別
解鎖SD NAND、TF卡、SD卡的應用密碼

瀚海微SD NAND/TF卡數據讀寫超時(Data Transfer Timeout)問題深度解析
SD NAND vs SPI NAND:嵌入式存儲的精裝房和毛坯房之爭
一文讀懂 SD NAND,小白也能秒變存儲技術大神

SDIO SD卡電路設計速成攻略:核心步驟+調試技巧 !



 工商網監
工商網監
評論