 深度分析自動駕駛傳感器系統
深度分析自動駕駛傳感器系統

超聲波雷達、毫米波雷達和多攝像頭系統已經在高端汽車上應用,隨著智能駕駛發展破竹之勢,環境感知技術將快速發展,進一步發揮協同作用。
如若要想在2021/2022的年度車型上實現SAE L4/L5的全自動駕駛功能,就需要應用多種傳感器冗余系統。當今的半自動駕駛系統采用了各種各樣數量和設計的雷達和攝像頭系統。而高性能價格合理、能檢測300米半徑內信息的激光探測與測距系統開發,還處在預研階段。大多數汽車制造商都認為,如果要實現全自動駕駛,攝像頭、雷達和激光雷達這三大傳感器系統缺一不可。
目前,超聲波雷達、毫米波雷達和多攝像頭系統已經在高端汽車上應用,隨著智能駕駛發展破竹之勢,環境感知技術將快速發展,進一步發揮協同作用。雖然傳感器僅僅是自動駕駛汽車的一部分,但是市場前景十分廣闊。因此,相關機構預計到2020年左右全球車載攝像頭、毫米波雷達和夜視系統等市場都將進入快速成長期。
攝像頭智能駕駛之慧眼
車載攝像頭是實現眾多預警、識別類ADAS功能的基礎。 在眾多ADAS功能中,視覺影像處理系統較為基礎,對于駕駛者也更為直觀,而攝像頭又是視覺影像處理系統的基礎,因此車載攝像頭對于智能駕駛必不可少。
車道偏離預警(LDW)、前向碰撞預警(FCW)、交通標志識別(TSR)、 車道保持輔助(LKA)、行人碰撞預警(PCW)、全景泊車(SVP)、駕駛員疲勞預警等眾多功能都可借助攝像頭實現,有的功能甚至只能通過攝像頭實現。
攝像頭可實現的ADAS功能
車載攝像頭價格持續走低,未來單車多攝像頭將成為趨勢。相對于車載雷達等傳感器價格更加低廉,易于普及應用。 特斯拉Autopilot 2.0的硬件系統中就包含8個攝像頭,未來單車多攝像頭將成為趨勢。
根據不同ADAS功能的要求,攝像頭的安裝位置也不盡相同。按攝像頭的安裝位置不同,可分為前視、側視、后視和內置四個部分。未來要實現全套ADAS功能,單車需配備至少5個攝像頭。據高工智能產業研究院(GGII)研究院預估,攝像頭隨著ADAS滲透率的提升,市場規模由2016年的20億元增長到2020年的58億元,年復合增長率為30%。
車載攝像頭的價格不斷走低
前視攝像頭使用頻率最高,單一攝像頭可實現多重功能。 通過算法開發優化,單一前視攝像頭可以實現多重功能,如行車記錄、車道偏離預警、前向碰撞預警、行人識別等。未來也有望通過算法整合,實現更多ADAS功能。
前視攝像頭一般為廣角鏡頭,安裝在車內后視鏡上或者前擋風玻璃上較高的位置,以實現較遠的有效距離。

側視攝像頭代替后視鏡將成為趨勢。 由于后視鏡的范圍有限,當另一輛在斜后方的車位于這個范圍之外就“隱身”,這個范圍之外的部分就叫做盲區。因為盲區的存在,大大增加了交通事故發生的幾率。而在車輛兩側加裝側視攝像頭可以基本覆蓋盲區,當有車輛進入盲區時,就有自動提醒駕駛員注意,這就是盲區監測系統。
目前還出現了新的潮流,那就是使用側視廣角攝像頭取代后視鏡,這樣既能降低風阻,同時又可以獲得更大更廣的視角,避免在危險的盲區發生意外, 寶馬i8 Mirrorless概念車就采用如此設計。
汽車后視鏡盲區
全景泊車系統調用車身周圍多個攝像頭,助泊車開啟“上帝視角”。 全景泊車系統通過安裝在車身周圍的多個超廣角攝像頭,同時采集車輛四周的影像,經過圖像處理單元矯正和拼接之后,形成一副車輛四周的全景俯視圖,實時傳送至中控臺的顯示設備上。
駕駛員坐在車中即可以“上帝視角”直觀地看到車輛所處的位置以及車輛周報的障礙物,從容操縱泊車入位或通過復雜路面,有效減少刮蹭、碰撞等事故的發生。
全景泊車系統的圖像拼接技術
車載攝像頭應用廣泛且價格相對低廉,是最基本最常見的傳感器,未來市場空間將超百億人民幣。
攝像頭對于多個ADAS功能必不可少,未來單價也有望繼續走低,將帶動車載攝像頭市場空間快速增長。根據的估算,全球車載攝像頭出貨量將從2014年的2800萬枚增長到2020年的8300萬枚,復合增長率達20%。
據此估算,全球車載攝像頭市場規模將從2015年的62億人民幣增長到2020年的133億人民幣,年復合增長率將達16%。消費區域主要在美洲、歐洲、亞太等地,其中亞太地區將成為增長最快的市場。
2020年國內車載攝像頭市場需求量測算
攝像頭產業鏈主要有鏡頭組、CMOS(Complementary Metal-Oxide Semiconductor,即互補性金屬氧化物半導體)、 DSP(Digital Signal Process 即數字信號處理器)、模組封裝等環節組成。
近幾年,智能手機的高速增長帶動了攝像頭市場的蓬勃發展,但是從 2014年開始智能手機的增速已轉緩,手機攝像頭未來的增長率也必將放緩。隨著車載攝像頭市場的興起,手機攝像頭產業鏈各個環節的產能將向車載攝像頭產業轉移,預計未來CMOS、鏡頭、 模組封裝等產業鏈環節將繼續保持高增長。
雷達測距測速必不可少的傳感器
雷達通過發射聲波或者電磁波對目標物體進行照射并接收其回波,由此獲得目標物體的距離、距離變化率(徑向速度)、大小、方位等信息。雷達最先應用于軍事中,后來逐漸民用化。
隨著汽車智能化的發展趨勢,雷達開始出現在汽車上,主要用于測距、測速等功能。汽車雷達可分為超聲波雷達、毫米波雷達、激光雷達等,不同雷達的原理不盡相同,性能特點也各有優勢,可用于實現不同的功能。
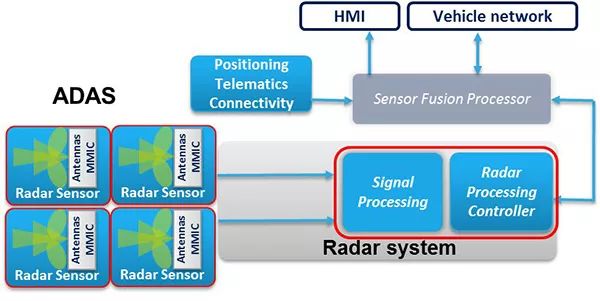
雷達傳感器(僅進行原始數據收集)的基本架構
(1)超聲波雷達
超聲波雷達是利用傳感器內的超聲波發生器產生40KHz的超聲波,再由接收探頭接收經障礙物反射回來的超聲波,根據超聲波反射接收的時間差計算與障礙物之間的距離。超聲波雷達成本較低,探測距離近精度高,且不受光線條件的影響,因此常用于泊車系統中。
自動泊車功能離不開超聲波雷達。寶馬最新的i系列和7系列已經支持使用車鑰匙遙控汽車自動泊車,在操作過程中用戶只需要發出前進或后退兩個指示,汽車就會持續使用超聲波傳感器檢測車位和障礙物,自動操作方向盤和制動器,實現自動泊車。
(2)毫米波雷達:ADAS核心傳感器
毫米波是指波長在1mm到10mm之間的電磁波,換算成頻率后,毫米波的頻率位于30GHz到300GHz之間。毫米波的波長介于厘米波和光波之間,因此毫米波兼有微波制導和光電制導的優點。
毫米波雷達在導彈制導、目標監視和截獲、炮火控制和跟蹤、高速通信、衛星遙感等領域都有廣泛的應用。近些年,隨著毫米波雷達技術水平的提升和成本的下降,毫米波雷達開始應用于汽車領域。
毫米波雷達關鍵技術主要由國外電子公司掌控。毫米波雷達系統主要包括天線、收發模塊、信號處理模塊,而MMIC(MonolithicMicrowaveIntegratedCircuit)芯片和天線PCB板(PrintedCircuitBoard)是毫米波雷達的硬件核心。
目前毫米波雷達關鍵技術主要被Bosch、Continental、Denso、Autoliv等零部件巨頭壟斷,特別是77GHz產品技術只有Bosch、Continental、Denso、Delphi等少數幾家公司掌握。
激光雷達功能強大成本大幅降低可期
激光雷達是軍轉民的高精度雷達技術。激光雷達的應用一開始主要為軍事領域,受到了各國軍事部門的極大關注。相比普通雷達,激光雷達可提供高分辨率的輻射強度幾何圖像、距離圖像、速度圖像。在民用領域中,激光雷達因其在測距測速、三維建模等領域的優越性能也被廣泛應用。
激光雷達性能精良,是無人駕駛的最佳技術路線。激光雷達相對于其他自動駕駛傳感器具有非常優越的性能:
1)分辨率高。激光雷達可以獲得極高的角度、距離和速度分辨率。通常激光雷達的角分辨率不低于0.1mard也就是說可以分辨3km距離上相距0.3m的兩個目標,并可同時跟蹤多個目標;距離分辨率可達0.1m;速度分辨率能達到10m/s以內。如此高的距離、速度分辨率意味著激光雷達可以利用多普勒成像技術獲得非常清晰的圖像。
2)精度高。激光直線傳播、方向性好、光束非常窄,彌散性非常低,因此激光雷達的精度很高。
3)抗有源干擾能力強。與微波、毫米波雷達易受自然界廣泛存在的電磁波影響的情況不同,自然界中能對激光雷達起干擾作用的信號源不多,因此激光雷達抗有源干擾的能力很強。
激光雷達可以分為一維激光雷達、二維激光雷達、三維激光掃描儀、三維激光雷達等。其中一維激光雷達主要用于測距測速等,二維激光雷達主要用于輪廓測量、物體識別、區域監控等,三維激光雷達可以實現實時三維空間建模。
車載三維激光雷達一般安裝在車頂,可以高速旋轉,以獲得周圍空間的點云數據,從而實時繪制出車輛周邊的三維空間地圖;同時,激光雷達還可以測量出周邊其他車輛在三個方向上的距離、速度、加速度、角速度等信息,再結合GPS地圖計算出車輛的位置,這些龐大豐富的數據信息傳輸給ECU分析處理后,以供車輛快速做出判斷。
-
傳感器
+關注
關注
2576文章
55043瀏覽量
791391 -
自動駕駛
+關注
關注
793文章
14884瀏覽量
179918 -
毫米波雷達
+關注
關注
108文章
1162瀏覽量
66256
原文標題:攝像頭、雷達、激光雷達——自動駕駛幾大傳感器系統大揭秘
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
如何設計自動駕駛傳感器失效檢測與容錯策略?
自動駕駛中提到的“深度相機”是個啥?
自動駕駛BEV Camera數據采集系統:高精度時間同步解決方案

超聲波傳感器線圈:自動駕駛實現精確實時近距離感知的關鍵
如何處理自動駕駛感知傳感器臟污問題?

激光雷達傳感器在自動駕駛中的作用
自動駕駛仿真測試有什么具體要求?

想實現自動駕駛,哪些技術非常關鍵?
太陽光模擬器 | 在汽車自動駕駛開發中的應用

康謀分享 | 基于多傳感器數據的自動駕駛仿真確定性驗證

自動駕駛汽車是如何準確定位的?




 工商網監
工商網監
評論