 新型Cheetah機器狗不用眼睛也可以快速跳躍
新型Cheetah機器狗不用眼睛也可以快速跳躍

目前大部份的機器人都是靠「視覺」-- 無論是攝影機還是 Lidar -- 來判斷前進的路線,但在真實世界中這不一定總是可行,像是太暗或太不平整的表面,都可能會造成機器人誤判。我們人類當然也有碰到這樣狀況時候,但我們可以靠著身體接觸地面或其他表面的回饋,來作為判定的依據「摸黑」前進,因此 MIT 的機器專家們也想讓機器人也有類似的能力。
這研究的結果,就是最新一版的Cheetah機器狗,名為「Cheetah 3」。它內建的演算法共有兩種,一個可以綜合加速感應器、陀螺儀、關節的位置、以及馬達上的力回饋,計算出目前最好的反應來。例如當前腳感應到地上有凸起時,電腦就可以運算這個凸起的材質能不能支撐自己的重量、以及如何使力才能保持平衡地踩過去。另一個演算法則是負責定位,既使發生了偏離,依然可以計算出自己的位置,回到正確的軌道上。在后面的視頻中,可以看到Cheetah 3爬一個充滿雜物的樓梯,甚至跳到桌子上呢。
當然,不太可能機器人完全靠「摸」的來移動,這技術更多是配合視覺系的導航系統,在障礙多、空間狹小的地方來使用。核電廠的檢查、倒塌大樓的救助等,都是這技術能投入應用之處吧。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
陀螺儀
+關注
關注
44文章
889瀏覽量
101632 -
MIT
+關注
關注
3文章
254瀏覽量
24997 -
機器狗
+關注
關注
3文章
188瀏覽量
10988
原文標題:MIT研發Cheetah機器狗 不用眼睛就能爬、跑、跳
文章出處:【微信號:IEEE_China,微信公眾號:IEEE電氣電子工程師】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
不用找原廠也能做門禁卡嗎?
不用找原廠也能做門禁卡嗎?能。通過選擇通用協議門禁卡(如M1卡、CPU卡)并匹配門禁系統參數,無需依賴原廠即可定制。廣州杰眾智能科技有限公司提供符合國際標準的門禁卡定制服務,支持跨品牌適配,幫助用戶

四足機器狗面臨的熱管理與散熱挑戰:持續運行的隱形障礙
下面用專業且貼近工程實際的方式,把四足機器狗的熱管理與散熱挑戰拆透——它之所以被稱為「持續運行的隱形障礙」,是因為不爆炸、不報錯、不明顯卡機,卻會悄悄讓機器狗降功率、斷續航、折壽命、無

老舊設備采數:不用改造也能連
“不用改造也能連”的核心邏輯,是“非侵入式采集+邊緣計算”的組合方案,就像給老設備戴了塊功能強大的“智能手環”,全程不改動原有控制系統,完美避開拆機風險和停工損失。

老舊機床實戰:設備數據采集系統落地,不用改造也能聯網
工信部數據顯示,我國工業領域老舊設備存量超千萬臺,這些設備不是智能化轉型的 “絆腳石”,而是待挖掘的 “金礦”。不用大拆大改、3 天快速部署、低成本投入的采集系統,正在讓越來越多的老機床煥發新生。

實戰指南:老舊產線改造設備管理系統,不用拆機也能提效
不用拆機、低成本投入,就能讓老設備從 “被動搶修” 變成 “主動預防”:故障停機減少 40%+,維護成本降低 20%+,管理效率提升 60%+。
老舊產線升級不必大拆大改,找對 “外接感知 + 快速部署” 的輕量化方案,就能讓沉淀多年的設備煥發新生,成為降本增效的 “主

基于迅為RK3588開發板實現高性能機器狗主控解決方案-?AI能力實戰:YOLOv5目標檢測例程
基于迅為RK3588開發板實現高性能機器狗主控解決方案-?AI能力實戰:YOLOv5目標檢測例程

華為多智能體協同系統為機器狗提供業務體驗保障
在華為上海練秋湖研發中心,一只身形靈活的機器狗正在有條不紊地執行巡檢任務。它穿梭于園區小徑,時而駐足識別環境,時而為訪客提供引路或咖啡配送服務。然而,這些看似科幻的場景背后,是華為多智能體協同系統提供了智能化的網絡,從而保障了機器
產品案例 | 遛“狗”新方式,盒子來幫忙
當一只機器狗被一個巴掌大的小盒子操控,躲避障礙、跟隨指令完成轉身、停止等動作時,圍觀人群紛紛發出驚嘆:“這么小的盒子,居然能‘溜’機器狗?”。這個“小盒子”,正是

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
故障率從 15% 降至 3% 以下。隨著磁隧道結 (MTJ) 等新型技術成熟,下一代磁傳感器有望實現納米級精度、皮秒級響應速度,或使機器人 “高速競速” 最高速度提升 40%;柔性磁傳感器研發也將讓
發表于 08-26 10:02
機器人看點:越疆機器人正式發布六足仿生機器狗 智元公布機器人運動控制模型專利
給大家帶來兩個機器人的最新消息: 越疆機器人正式發布六足仿生機器狗 7月9日,深圳越疆機器人正式發布六足仿生
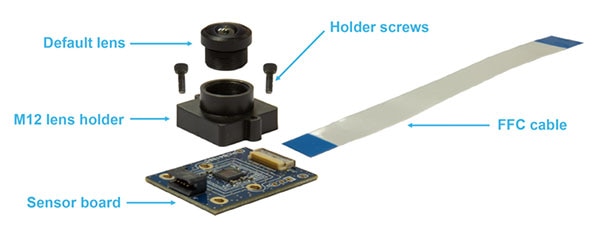
通過易于使用的相機模組快速為應用添加機器視覺
) 的神經科學家就發現,大腦只需 13 毫秒 (ms) 就能根據眼睛看到的東西形成完整的圖像。 視覺如此重要,因此許多人都希望在機器上添加視覺傳感器就不足為奇了。為產品添加機器視覺,可以
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速
發表于 04-30 01:05
樹莓派遇上機器狗:科技界的“春晚明星”是怎樣煉成的?
機器人上春晚,這次穿上了東北花棉襖!每年春晚,總有一些節目讓人眼前一亮,今年也不例外!UnitreeH1機器人化身“秧BOT”,身著東北花棉襖,扭起了“賽博秧歌”,嚇壞了萌翻了全場觀眾。這已經不是




 工商網監
工商網監
評論