 如何在實際應用中監測和控制溫度變化速率?
如何在實際應用中監測和控制溫度變化速率?

 LZ-DZ100電能質量在線監測裝置
LZ-DZ100電能質量在線監測裝置
在實際應用中(如電能質量在線監測裝置的溫度循環試驗、現場安裝后的環境監控等),監測和控制溫度變化速率需要結合專用設備、精準傳感、閉環控制算法及場景適配策略,確保速率符合預設要求(如 5℃/min±2℃/min)。具體操作可分為 “監測” 和 “控制” 兩大環節,結合實際場景的細節如下:
一、溫度變化速率的監測方法
監測的核心是實時獲取溫度隨時間的變化數據,并計算速率(單位:℃/min),需解決 “測哪里”“怎么測”“如何算” 三個問題。
1. 選擇合適的溫度傳感器,確保測量精度
溫度傳感器是監測的基礎,需滿足 “響應快、精度高、抗干擾” 的要求,具體選型:
首選:鉑電阻(PT100/PT1000):精度高(A 級精度 ±0.15℃@0℃)、線性度好,適用于 - 200℃~850℃范圍,能快速響應溫度變化(熱響應時間 < 10 秒),適合裝置內部或環境溫度的監測。
次選:熱電偶(K 型 / J 型):響應速度更快(熱響應時間 <5 秒),但精度稍低(±1℃),適合高溫場景(如> 200℃)或需要快速捕捉溫度變化的部位(如功率模塊表面)。
避免:紅外傳感器:易受環境輻射(如試驗箱內壁反光)影響,測量誤差大,不適合精準速率監測。
2. 傳感器安裝位置:貼近 “關鍵區域”,而非僅測環境
溫度變化速率的監測需反映裝置自身的溫度變化(而非試驗箱的環境溫度),因此傳感器安裝位置需精準:
內部核心元器件:如 CPU、ADC 芯片、電源模塊等對溫度敏感的部件,需將傳感器用導熱膠粘貼在其表面(避免直接接觸引腳,防止短路),監測元器件的實際溫變速率。
裝置外殼與內部空氣:在外殼內壁(靠近發熱源處)和內部空腔各放 1 個傳感器,反映整體結構的溫變均勻性(若內外速率差異大,可能因散熱不良導致局部過熱)。
環境對照:在試驗箱內遠離裝置的位置放 1 個傳感器,用于對比 “設定環境速率” 與 “裝置實際感受速率” 的差異(若差異過大,需調整試驗箱控制參數)。
3. 數據采集與速率計算:高頻采樣 + 平滑處理
溫度變化速率是 “溫度隨時間的導數”,需通過高頻采樣和計算實現:
采樣頻率:至少 1Hz(每秒 1 次),對于快速溫變(如 > 5℃/min)需提高至 5~10Hz,避免因采樣間隔過長導致速率計算誤差(例如:1℃/min 的速率,10 秒間隔的溫差僅 0.167℃,低頻率易被噪聲掩蓋)。
速率計算:用相鄰兩個采樣點的溫度差(ΔT)除以時間間隔(Δt,單位:min),即速率 v=ΔT/Δt。例如:t1 時刻溫度 25℃,t2=10 秒后溫度 26℃,則 v=(1℃)/(10/60 min)=6℃/min。
平滑處理:因傳感器噪聲(如 ±0.1℃波動)可能導致瞬時速率跳變,需用滑動平均法(如取 5 個連續數據的平均值)或一階濾波算法平滑結果,更接近真實速率。
二、溫度變化速率的控制手段
控制的目標是讓裝置所處環境(或自身溫度)的變化速率穩定在預設范圍內(如 3~7℃/min),核心依賴環境試驗設備的閉環控制,輔以負載與參數優化。
1. 核心設備:帶 “速率控制功能” 的高低溫試驗箱
普通高低溫箱僅能設置目標溫度(如 - 40℃→70℃),無法控制變化速率;需使用支持 “斜坡控制(Ramp Control)” 的試驗箱,其工作原理是:
閉環反饋:試驗箱內置傳感器實時監測箱內溫度,與 “預設速率曲線” 對比,通過調節加熱器功率(升溫時)或制冷壓縮機輸出(降溫時),動態修正溫度變化速度(如目標速率 5℃/min,若當前速率僅 3℃/min,自動增大加熱功率)。
參數設置:在試驗箱操作界面輸入 “起始溫度”“目標溫度”“目標速率”,設備會自動計算升溫 / 降溫時間(如從 25℃到 70℃,以 5℃/min 速率需 9 分鐘),并按曲線運行。
2. 優化控制參數:解決 “超調” 與 “滯后” 問題
試驗箱的控制精度可能受負載(裝置自身發熱 / 散熱)影響,需通過參數調整優化:
PID 參數整定:試驗箱的溫度控制通常采用 PID 算法(比例 - 積分 - 微分),若速率波動大(如實際速率在 3~7℃/min 間跳變),需調整參數:
比例系數(P):增大 P 可加快響應(減少滯后),但易超調;
積分系數(I):增大 I 可消除穩態誤差(如長期速率偏低);
微分系數(D):增大 D 可抑制超調(如升溫時避免瞬間速率超過目標)。
實際操作中,可通過 “自整定” 功能讓設備自動優化 PID 參數,或參考設備手冊的推薦值(如針對電子設備,P=50~80,I=100~200,D=5~10)。
負載補償:若裝置在工作時自身發熱(如功率模塊功耗 50W),升溫階段可能因 “裝置產熱 + 箱內加熱” 導致速率偏高,需在控制中扣除負載熱量(如通過試驗箱的 “負載補償” 功能輸入裝置功耗,設備自動降低加熱功率)。
3. 分階段控制:適應升 / 降溫的不同特性
升溫(加熱)和降溫(制冷)的物理過程不同,速率控制難度差異大,需分開設置:
升溫階段:依賴電加熱器,響應快、易控制,可按目標速率直接設置(如 5℃/min),若速率偏低,增大加熱功率即可。
降溫階段:依賴制冷系統(壓縮機 + 蒸發器),受環境溫度和箱內負載影響大(如環境溫度 30℃時,從 70℃降至 - 40℃的速率可能比環境溫度 20℃時慢)。若降溫速率不足(如目標 5℃/min,實際僅 3℃/min),可:
提前預冷試驗箱(如先將箱溫降至 - 40℃,再放入裝置開始循環);
減少箱內負載(如僅放 1 臺裝置,而非多臺堆疊);
選擇制冷功率更大的試驗箱(如標稱降溫速率≥8℃/min 的設備,確保實際負載下能達到 5℃/min)。
4. 應急控制:避免速率異常導致設備損壞
需設置 “速率超限保護” 機制,防止因設備故障(如加熱器失控)導致速率過高:
上限報警:在試驗箱中設置速率上限(如目標 5℃/min,上限設 8℃/min),當監測到速率超過上限時,自動切斷加熱 / 制冷輸出,發出聲光報警。
手動干預:若發現速率長期偏低(如因制冷系統結霜導致降溫速率 < 2℃/min),需暫停試驗,排查原因(如除霜、清理過濾器)后再繼續。
三、實際應用中的關鍵注意事項
設備校準:傳感器和試驗箱需定期校準(如每年 1 次),用標準溫度計(如二等鉑電阻)驗證傳感器精度,用速率校準裝置(如能輸出已知速率的溫度源)驗證試驗箱的控制精度,確保測量和控制誤差 <±0.5℃/min。
裝置熱慣性:裝置本身有熱慣性(如金屬外殼升溫慢于箱內空氣),實際監測的 “裝置速率” 可能滯后于 “箱內環境速率”,控制時需以 “裝置速率” 為反饋目標(而非箱內環境速率)。
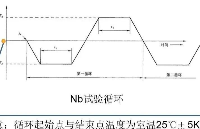
記錄與追溯:全程記錄溫度 - 時間曲線(如每 1 秒存 1 個數據),通過曲線計算實際速率(用斜率表示),并與預設速率對比,形成驗證報告,確保可追溯性。
通過以上方法,可在實際應用中精準監測和控制溫度變化速率,確保試驗結果能真實反映裝置在目標溫變條件下的穩定性。
審核編輯 黃宇
-
監測
+關注
關注
2文章
4396瀏覽量
47434
發布評論請先 登錄
MAX6641:SMBus兼容的溫度監測與自動PWM風扇速度控制器
深入剖析MAX6678:精準溫度監測與智能風扇控制的理想選擇
MAX6615/MAX6616:雙通道溫度監測與風扇速度控制芯片解析
智能無線溫度監測系統在工業設備監測中的應用:精準測溫預警,賦能設備智能運維

MAX6641:SMBus 兼容的溫度監測與自動 PWM 風扇速度控制器
MAX6640:2通道溫度監測與雙自動PWM風扇速度控制器
CW32 MCU溫度監測應用

溫度變化速率對電能質量在線監測裝置的長期穩定性有何影響?
Modbus RTU轉Profinet網關在工業溫度監測系統中的應用與實現

電機溫度監測系統低功耗無線節點模塊設計
應用在農業環境溫度監測中的高精度數字溫度傳感芯片

氣壓溫度流量監測系統功能特點與應用
溫度變化試驗:原理、用途與流程解析



 工商網監
工商網監
評論