 基于 AS32X601 微控制器的定時器模塊(TIM)技術研究與應用實踐
基于 AS32X601 微控制器的定時器模塊(TIM)技術研究與應用實踐

摘要: 本文全面介紹了國科安芯推出的AS32X601系列微控制器的定時器模塊(TIM),包括其系統架構、功能特性、應用場景以及工程實踐要點。通過對芯片的詳細分析,揭示了其高性能運行的基礎。本文詳細闡述了高級定時器和通用定時器的計數器精度、預分頻器可編程性,以及輸入捕獲、輸出比較、PWM生成等關鍵功能,并結合數據手冊補充了大量技術細節,如死區時間設置、剎車機制等。在應用場景部分,本文針對電機控制、數字電源設計、工業自動化等典型場景,探討了TIM模塊的實際應用方式,并結合DMA技術減輕CPU負擔的具體實現方法。本文還強化了工程實踐指南,提供配置流程優化建議、實時性保障措施以及可靠性設計要點,旨在為開發者提供詳實的TIM模塊應用參考資料。
關鍵詞
AS32X601、定時器模塊(TIM)、高級定時器、通用定時器、電機控制、數字電源、工業自動化
引言
AS32X601是國科安芯推出的一系列高性能的32位RISC-V指令集微控制器,廣泛應用于工業控制、汽車電子、商業航天等領域。其內置的定時器模塊(TIM)具備高級定時器和通用定時器,支持多種計數模式、PWM生成、輸入捕獲和輸出比較等功能,是實現精確時間控制和信號處理的核心組件。
本文旨在深入剖析AS32X601微控制器的TIM模塊,探討其在不同應用場景中的應用實踐,并提供詳盡的工程實踐指導,以幫助開發者更好地利用該模塊實現高效、可靠的定時器功能。
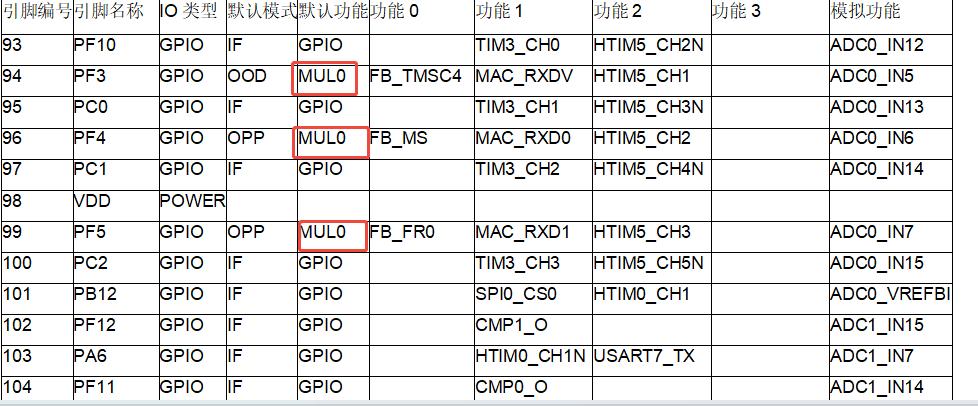
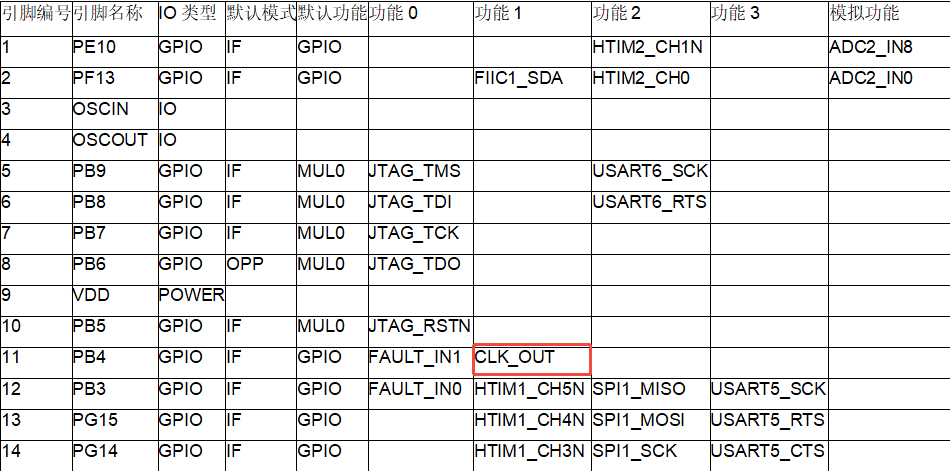
AS32X601內置多個高級定時器(TIM)和通用定時器(TIMx),用于各種定時、PWM 生成、輸入捕獲、輸出比較和編碼器接口等應用。
高級定時器包含一個32位自動重載計數器,該計數器由可編程預分頻器驅動,支持遞增、遞減、中心計數、編碼器模式等計數方式。高級定時器具有6個獨立通道,可實現測量輸入信號的脈沖寬度、可編程PWM輸出、帶死區插入的互補PWM等功能。
通用定時器包含一個16位自動重載計數器,該計數器由可編程預分頻器驅動,支持遞增、遞減、中心計數、編碼器模式等計數方式。通用定時器具有4個獨立通道,可實現測量輸入信號的脈沖寬度、可編程PWM輸出等功能。
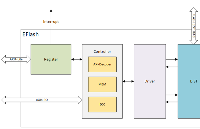
第一章 定時器系統架構
STM32微控制器的定時器系統采用模塊化設計理念,構建了一個完整的時間管理生態系統。通用定時器(TIM2-TIM5)作為基礎功能單元,采用多層次結構設計,包含時基單元、輸入捕獲模塊、輸出比較模塊和中斷控制單元。高級定時器(TIM1/TIM8)在此基礎上增加了互補輸出控制單元、剎車功能模塊和霍爾傳感器接口,形成更復雜的控制拓撲。
時鐘網絡采用分布式架構,通過APB總線橋接器與系統時鐘相連。每個定時器都配備獨立的預分頻器(PSC)和自動重載寄存器(ARR),形成兩級分頻體系。這種設計既保證了時鐘同步性,又提供了靈活的時鐘配置選擇。定時器內部采用流水線技術處理計數和比較操作,確保時序控制的精確性。
第二章 通用定時器功能詳解
2.1 時基單元工作機制
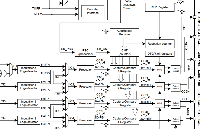
時基單元是定時器的核心引擎,其工作過程可以分為三個階段:時鐘選擇階段通過多路復用器確定時鐘源;分頻階段通過可編程預分頻器調整計數頻率;計數階段由16/32位計數器執行實際計時操作。計數器采用同步設計,在時鐘上升沿更新狀態,確保計數的確定性。
2.2 輸入捕獲系統
輸入捕獲系統由邊沿檢測器、數字濾波器和捕獲寄存器組構成三級處理流水線。邊沿檢測器支持可編程極性選擇,數字濾波器采用可配置的采樣窗口機制,有效抑制信號抖動。捕獲事件發生時,系統會在當前計數周期結束后將計數器值鎖存到捕獲寄存器,同時設置中斷標志。這種設計既保證了捕獲精度,又避免了競爭條件。
2.3 PWM生成原理
PWM生成模塊采用比較匹配機制,包含周期寄存器和占空比寄存器雙重控制。在邊沿對齊模式下,計數器從零開始遞增,當與占空比寄存器匹配時改變輸出狀態,達到周期值時復位并重新開始。中央對齊模式下,計數器先遞增后遞減,在正負峰值點進行比較匹配,產生對稱的PWM波形。輸出極性控制電路可以獨立配置每個通道的有效電平。
第三章 高級定時器增強功能
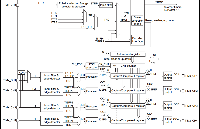
3.1 互補PWM輸出系統
互補PWM系統包含主輸出通道和互補輸出通道,通過死區發生器實現安全切換。死區時間可編程配置,最小分辨率達到系統時鐘的一個周期。剎車電路采用多級處理架構,包含模擬比較器、數字濾波器和狀態機,確保在故障條件下快速關斷輸出。保護機制支持多種恢復策略,包括自動恢復和手動恢復模式。
3.2 編碼器接口設計
編碼器接口采用正交解碼技術,內置方向識別邏輯和四倍頻計數功能。接口包含噪聲抑制電路,可有效處理機械觸點抖動。位置計數器支持多種歸零模式,包括硬件歸零和軟件歸零。系統還提供索引信號處理功能,實現絕對位置校準。
3.3 高級觸發系統
觸發網絡采用矩陣式拓撲,支持多種觸發源選擇。包括外部引腳觸發、內部定時器級聯觸發和特定事件觸發。觸發信號經過同步處理后分發到各個功能單元,確保時序一致性。系統還提供觸發延遲補償機制,精確控制各通道的響應時序。
第四章 應用場景深度分析
4.1 電機控制解決方案
在無刷直流電機控制中,高級定時器實現六步換相控制算法。通過霍爾傳感器接口檢測轉子位置,互補PWM輸出驅動三相橋式電路。死區時間根據功率器件特性精確設置,剎車輸入連接過流保護電路。重復計數器用于實現PWM周期倍數控制,減少CPU干預。
4.2 數字電源設計
開關電源應用中,定時器實現電壓模式或電流模式控制。多通道PWM輸出驅動功率級,輸入捕獲測量輸出電壓反饋。通過中央對齊PWM降低開關損耗,利用觸發同步ADC采樣實現閉環控制。保護功能實時監控故障條件,確保系統安全。
4.3 工業自動化應用
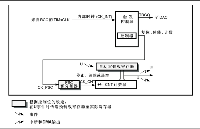
在自動化設備中,通用定時器處理編碼器信號,實現精確位置控制。多個定時器級聯構成測量系統,同時捕獲多軸運動參數。通過DMA傳輸測量數據,減輕CPU負擔。利用定時器同步功能,確保多軸運動的協調性。
第五章 工程實踐指南
5.1 配置流程優化
推薦采用分步配置策略:首先初始化時基參數,然后配置功能模塊,最后設置中斷和DMA。時鐘配置需要考慮APB預分頻系數的影響,確保獲得預期的計時精度。
5.2 實時性保障措施
關鍵時序控制應采用硬件自動完成,減少軟件干預。中斷服務程序遵循精簡原則,復雜處理移交后臺任務。使用影子寄存器實現參數的無縫更新,避免控制過程中的數據不一致。考慮使用定時器級聯或主從模式實現長周期定時。
5.3 可靠性設計要點
電源設計需保證定時器供電穩定,避免復位異常。關鍵信號走線注意電磁兼容設計,必要時添加濾波電路。軟件實現雙重保護機制,結合硬件保護和軟件監控。定期校準時鐘基準,補償溫度漂移影響。
本技術手冊通過系統化的架構分析、詳細的工作原理說明和實用的工程指導,為開發者提供了全面的定時器應用參考。建議結合AS32X601參考手冊,針對應用需求進行深度優化設計。
審核編輯 黃宇
-
微控制器
+關注
關注
49文章
8781瀏覽量
165354 -
mcu
+關注
關注
147文章
19064瀏覽量
402232 -
定時器
+關注
關注
23文章
3370瀏覽量
124289
發布評論請先 登錄
探索DS2251T 128k軟微控制器模塊:特性、應用與技術細節
探索PIC16(L)F1885X/7X微控制器功能與應用介紹
CW32系列微控制器的時鐘源和定時器選項介紹
PT32L007x系列微控制器
TPL5100 ACTIVE 具有電源門控功能和 MOS 驅動器的 Nano 供電可編程定時器

?TPL5010-Q1 納米功耗系統定時器(帶看門狗功能)技術文檔摘要

AS32X601芯片Flash擦寫調試技術解析
第二十二章 TIM——高級定時器
第二十一章 TIM——通用定時器
第二十章 TIM——基本定時器
AS32X601驅動系列教程 GPIO_點亮LED詳解
AS32X601驅動系列教程 SMU_系統時鐘詳解



 工商網監
工商網監
評論