 晶振在機械臂中有什么優勢
晶振在機械臂中有什么優勢

人們常被機器人行走、識別人臉或對話的能力吸引,但真正決定其能否無縫融入人類環境的,是靈巧操作(Dexterous Manipulation)——即“用手”完成復雜物理交互的能力。這種手并非普通機械爪,而是需要多個關節和力度感知能力,背后依賴微型電機控制、傳感器反饋及高精度算法。
機械臂的核心需求
機械臂的微米級重復定位精度、多軸協同運動或力控交互,本質上是“時間的藝術”—電機、傳感器與算法的嚴格同步依賴高穩定時鐘信號。晶振作為時序基準,直接影響其三大核心性能。
泰晶晶振產品為靈巧手控制系統提供高穩定頻率輸出,滿足微秒級時序要求,外形尺寸涵蓋1.6mmx1.2mm~5.0 mmx3.2 mm多種封裝,頻率覆蓋8MHz到200MHz,適配各類主控和驅動模塊。這些基礎部件是機器人穩定運行的重要支撐。
多模態傳感融合
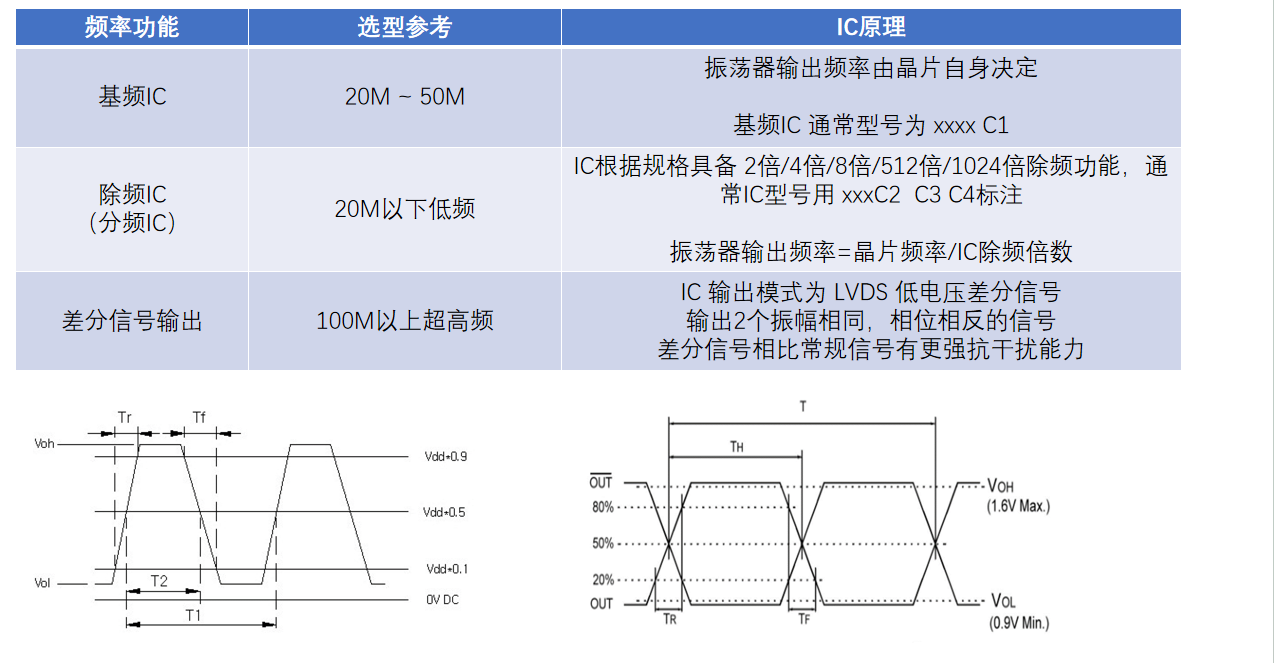
機械臂需集成視覺(3D攝像頭)、觸覺(電子皮膚)、力覺(六維力傳感器)、聽覺(麥克風陣列)等實時數據流,泰晶科技的高頻低抖動晶振(如100MHz以上高頻差分振蕩器)為多傳感器同步采樣提供時間基準,避免異構數據的時間錯位。
動態校準需求
在電磁噪聲復雜的工廠中,或極端環境交互中的微小形變(如抓取軟物體)要求關節編碼器和力矩傳感器的時鐘誤差小于1μs,泰晶的高精度溫補晶振(±0.1ppm穩定性)可滿足需求。
實時運動規劃
基于強化學習(RL)或擴散模型的在線軌跡生成,需主控芯片(如GPU/NPU)在10ms內完成計算,泰晶高基頻振蕩器的相位噪聲(<-165dBc/Hz@1MHz)直接保證運算時序確定性。
仿生關節控制
模仿人類肌肉的“剛度-阻尼”自適應調節,依賴高帶寬(>1kHz)的伺服控制環路,泰晶的MEMS振蕩器(如40MHz)可減少PWM信號抖動至納秒級。
極端溫度適應性
戶外機器人(如巡檢機器人、農業機器人、極地探測車等)面臨極端溫度、振動、濕度、電磁干擾等多重挑戰,傳統晶振易出現頻率漂移、啟停失效甚至物理損壞。泰晶科技的寬溫晶振系列(-40℃~+105℃)通過材料、封裝和電路設計的創新,為戶外機器人提供全氣候穩定的時序心臟。
人機交互安全
在協作機器人(Cobot)、服務機器人等人機共融場景中,安全響應速度直接決定交互風險等級。國際標準ISO/TS 15066規定:碰撞檢測延遲必須<5ms。泰晶晶振的啟停時間、時鐘穩定性、抗干擾能力可滿足需求。
具身智能時代的機械臂,本質上是“會思考的身體”。泰晶科技的時序解決方案,正在從“心跳維持者”升級為“神經脈沖協調者”,其技術路線與具身智能的三大定律(感知即計算、行動即推理、交互即學習)深度耦合。未來,晶振或將進一步與憶阻器、光學計算等新技術融合,成為機械臂“本體感受”的底層基石。
-
機器人
+關注
關注
213文章
31079瀏覽量
222253 -
晶振
+關注
關注
35文章
3564瀏覽量
73444 -
機械臂
+關注
關注
14文章
596瀏覽量
26125
原文標題:晶振—機械臂高精度動作的“隱形指揮官”
文章出處:【微信號:huktd0722,微信公眾號:泰晶科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
有源晶振的核心技術優勢與應用價值?

原子鐘相較于晶振有哪些特殊優勢


民用級晶振和工業級晶振的區別

浙江賽思電子科技有限公司溫補晶振的應用優勢有哪些?
旋轉花鍵在機械加工中心ATC裝置中有什么優勢?


溫補晶振與恒溫晶振的區別

基頻晶振和泛音晶振有什么不同



 工商網監
工商網監
評論