") 相機(jī)傳感器物理建模中的畸變?cè)O(shè)計(jì)
相機(jī)傳感器物理建模中的畸變?cè)O(shè)計(jì)

簡(jiǎn)介
在自動(dòng)駕駛感知系統(tǒng)中,相機(jī)傳感器的應(yīng)用十分廣泛,無論是前視,側(cè)視,環(huán)視甚至車內(nèi),相機(jī)傳感器都發(fā)揮著至關(guān)重要的作用,目前帶有ADAS和自動(dòng)駕駛功能的汽車,大多配備七八個(gè)甚至十幾個(gè)相機(jī)傳感器。
相機(jī)作為車載核心傳感器,優(yōu)點(diǎn)十分明顯。首先,相機(jī)傳感器技術(shù)成熟,價(jià)格便宜,尤其是相較于市面上動(dòng)輒上萬的激光傳感器,以相機(jī)傳感器作為主感知的方案更利于自動(dòng)駕駛汽車的量產(chǎn)。其次,相機(jī)采集的圖像包含物體色彩,輪廓等信息,這些是激光傳感器,毫米波傳感器無法輸出的,在識(shí)別交通標(biāo)識(shí),紅綠燈,車道線等方面具有獨(dú)一無二的優(yōu)勢(shì)。
在Sim Pro自動(dòng)駕駛仿真軟件中,結(jié)合基于物理的渲染方法,可以在配置相機(jī)各種參數(shù)的前提下進(jìn)行相機(jī)傳感器輸出圖像的仿真。其中的一大難題是相機(jī)的鏡頭種類繁多,比如廣角相機(jī),魚眼相機(jī)等,它們的鏡頭被設(shè)計(jì)成可以折射入射光,以得到比針孔相機(jī)更廣的視野,這會(huì)讓最終的成像產(chǎn)生畸變效果。本文主要介紹Sim Pro里相機(jī)傳感器物理建模中的畸變?cè)O(shè)計(jì)。
相機(jī)傳感器模型
相機(jī)傳感器模型主要設(shè)計(jì)為兩個(gè)部分,其一是每個(gè)像素的RGB顏色處理模塊,考慮到相機(jī)成像原理中的光電轉(zhuǎn)換過程,可以利用輸入?yún)?shù)中的曝光時(shí)間,鏡頭透過率等參數(shù)控制所有像素上的信息。為了體現(xiàn)部分相機(jī)可能出現(xiàn)的噪點(diǎn)效果,還可以設(shè)置暗電流噪聲,為了體現(xiàn)過曝和避免色彩丟失,采用了HDR高動(dòng)態(tài)范圍的渲染數(shù)據(jù)輸入。
除了對(duì)像素顏色信息的處理以外,另一部分為畸變效果仿真模塊,需要設(shè)計(jì)所有像素對(duì)應(yīng)的光線射入向量,由于不同鏡頭的折射效果,導(dǎo)致傳到每個(gè)像素的光線并不是沿像素直接射出的(如圖1),將相機(jī)傳感器近似為空間中的一個(gè)點(diǎn),此時(shí)每個(gè)像素上光線射入的方向可以用一個(gè)三維向量來表示,從而構(gòu)成畸變表。
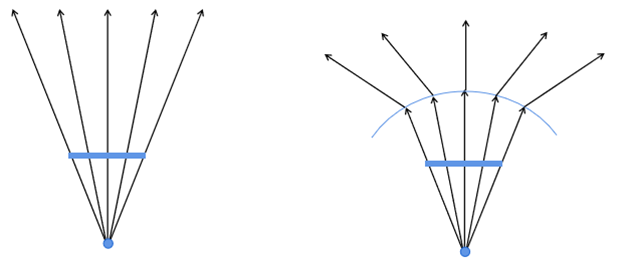
圖1:左為針孔相機(jī)的光線射入方向簡(jiǎn)化圖,右為廣角相機(jī)的光線射入方向簡(jiǎn)化圖
目前有很多畸變建模使用的是畸變參數(shù)k1,k2表示的畸變公式:
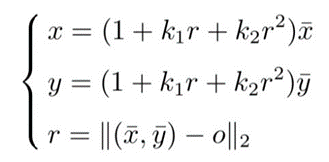
其中(x,y)表示畸變后輸出圖像坐標(biāo),(x ?,y ?)表示無畸變?cè)紙D像坐標(biāo),o表示畸變中心,公式表示距離畸變中心越遠(yuǎn),產(chǎn)生的畸變?cè)酱螅胀ǖ恼硇危残位兌伎梢酝ㄟ^該函數(shù)產(chǎn)生。但是,這個(gè)參數(shù)需要配合成像大小才可以正確生效,例如相同的圖像,由于像素大小的變化導(dǎo)致與畸變中心之間的距離變化,用相同參數(shù)會(huì)導(dǎo)致畸變效果不同,因此標(biāo)定這個(gè)參數(shù)還需要確定像素大小等信息,使用起來比較繁瑣。
此外,使用k1,k2參數(shù)的前提是必須先獲取沒有畸變的原圖像,并且必須比輸出圖像擁有更大的視場(chǎng)角,但是考慮到魚眼相機(jī)的觀測(cè)角度可能接近甚至超過180度,此時(shí)成像需要的無畸變圖像不能顯示在一張平面圖上導(dǎo)致無法使用畸變公式去生成畸變。
Sim Pro采用天空盒的原圖輸入格式,360度無死角儲(chǔ)存環(huán)境信息,針對(duì)畸變表或者畸變參數(shù)的輸入都可以做到完美的畸變效果。
畸變模型
像素向量建模:使用畸變參數(shù)的建模前提是獲取到無畸變的平面圖片數(shù)據(jù),這對(duì)于一般廣角相機(jī)來說是可以實(shí)現(xiàn)的,但是對(duì)于魚眼相機(jī),如果要獲取到無畸變的平面圖像,該平面大小會(huì)趨近于無窮大,此時(shí)不能再通過一張無畸變的圖像去產(chǎn)生畸變。此時(shí)通常使用像素向量的數(shù)據(jù),即事先通過測(cè)量標(biāo)定等方法,確認(rèn)圖像上每個(gè)像素點(diǎn)的信息是從哪個(gè)方向射入的,獲取該數(shù)據(jù)后,只需要去像素點(diǎn)對(duì)應(yīng)向量上去采集數(shù)據(jù)即可。對(duì)于畸變明顯,視場(chǎng)角非常大的魚眼相機(jī),通常使用以傳感器為中心的天空盒的數(shù)據(jù)來構(gòu)造畸變,構(gòu)造出每個(gè)像素點(diǎn)向量到天空盒位置的映射關(guān)系,從而達(dá)到在天空盒上獲取數(shù)據(jù)的目的,由于天空盒包含了傳感器可觀察范圍的全信息,因此這種方法可以適用于任何超大視場(chǎng)角的廣角相機(jī),魚眼相機(jī)建模。
首先,在仿真場(chǎng)景中獲取所有方向的天空盒數(shù)據(jù),這個(gè)數(shù)據(jù)可以通過設(shè)置水平,垂直視場(chǎng)角為90度的6個(gè)方向獲取的圖片數(shù)據(jù)拼接而來(如圖2),其中以傳感器朝向作為正前方,對(duì)于這一步獲取的圖片,盡量獲取更高的分辨率的圖片,對(duì)于視場(chǎng)角不超過270度的魚眼相機(jī),也可以只采用前上下左右5個(gè)面的數(shù)據(jù)以節(jié)約渲染成本。
對(duì)于畸變表中每個(gè)像素對(duì)應(yīng)的向量,通過簡(jiǎn)單的三角形原理,可以知道從包圍盒正方體的中心出發(fā),該向量所對(duì)應(yīng)的天空盒上的像素位置,將該像素點(diǎn)的顏色信息傳入輸出圖像對(duì)應(yīng)像素上(如圖3)。
畸變參數(shù)的統(tǒng)一處理
由于使用畸變表的方法也可以應(yīng)用于普通的廣角相機(jī),針對(duì)k1,k2畸變參數(shù)輸入的情況,Sim Pro將畸變參數(shù)轉(zhuǎn)化為畸變表之后,再進(jìn)行上一章節(jié)中介紹的畸變運(yùn)算,使得仿真中的畸變效果同時(shí)適用于畸變表與畸變參數(shù)兩種不同的輸入。
在確定像素大小以及畸變中心o(通常是圖像幾何中心)后,推算每個(gè)像素點(diǎn)坐標(biāo)(x,y)所對(duì)應(yīng)的無畸變?cè)紙D像中的像素點(diǎn)坐標(biāo)(x ?,y ?),
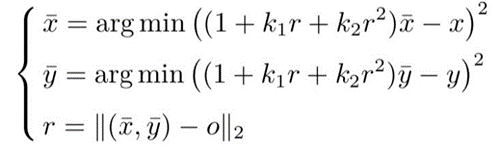
考慮到相機(jī)焦距f,構(gòu)成一個(gè)三維向量 (f,x ?,y ?),歸一化后作(x,y)為的向量信息存儲(chǔ)為畸變表。
總結(jié)
魚眼相機(jī),廣角相機(jī)在自動(dòng)駕駛汽車的感知系統(tǒng)中扮演著重要的角色,尤其是魚眼相機(jī)的超大探測(cè)范圍,廣泛應(yīng)用于汽車環(huán)視感知系統(tǒng)中。魚眼相機(jī)輸出的帶有畸變的環(huán)視圖,通過各款相機(jī)對(duì)應(yīng)的去畸變算法,可以形成近距離的俯視圖,應(yīng)用于自動(dòng)泊車,交通堵塞輔助等領(lǐng)域,Sim Pro相機(jī)傳感器能夠生成帶有準(zhǔn)確畸變的圖像,有助于在仿真端驗(yàn)證不同種類相機(jī)的去畸變算法與感知效果。
-
傳感器
+關(guān)注
關(guān)注
2577文章
55343瀏覽量
793245 -
相機(jī)
+關(guān)注
關(guān)注
5文章
1596瀏覽量
55977 -
模型
+關(guān)注
關(guān)注
1文章
3802瀏覽量
52225 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
794文章
14947瀏覽量
181009
原文標(biāo)題:相機(jī)傳感器物理建模中的畸變?cè)O(shè)計(jì)
文章出處:【微信號(hào):gh_c85a8e3c0f2a,微信公眾號(hào):賽目科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
智能制造中,如何為物理AI挑選傳感器?

CMOS傳感器數(shù)碼相機(jī)是什么?
設(shè)計(jì)傳感器需要注意幾點(diǎn)
數(shù)據(jù)手套中傳感器技術(shù)的研究
傳感器動(dòng)態(tài)建模研究方向
環(huán)形振蕩器物理不可克隆函數(shù)詳解
傳感器的設(shè)計(jì)要點(diǎn)及五大設(shè)計(jì)技巧
物理傳感器的概念_物理傳感器的種類及應(yīng)用
物理傳感器如何區(qū)分
傳感器物聯(lián)網(wǎng)技術(shù)助力打通城市供水“最后一公里”
AVM環(huán)視系統(tǒng):魚眼相機(jī)去畸變算法及實(shí)戰(zhàn)

專為加速器物理實(shí)驗(yàn)室設(shè)計(jì)的RTO/RTP示波器

基于DCC和張氏標(biāo)定的相機(jī)鏡頭畸變校正

磁致伸縮位移傳感器物理濾波和數(shù)字濾波



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論