 無感FOC算法:如何在動態與穩定之間找到最優平衡?--【其利天下】
無感FOC算法:如何在動態與穩定之間找到最優平衡?--【其利天下】

在無感FOC(Field-Oriented Control,磁場定向控制)算法中,動態響應和穩定性是電機控制系統中兩個非常重要的性能指標。動態響應指的是系統對輸入信號變化的快速反應能力,而穩定性則是指系統在各種擾動下保持運行狀態不變的能力。這兩者之間往往存在一定的矛盾,因此需要通過合理的設計和參數調整來實現平衡。以下是幾種常見的平衡方法:
一、濾波器設計
濾波器在無感FOC算法中用于平滑電流和速度信號,減少噪聲和干擾。濾波器的設計參數(如截止頻率)對系統的動態響應和穩定性有重要影響。
1. 低通濾波器(LPF)
高截止頻率:提高系統的動態響應速度,但可能會引入高頻噪聲。
低截止頻率:提高系統的穩定性,減少高頻噪聲,但響應速度會變慢。
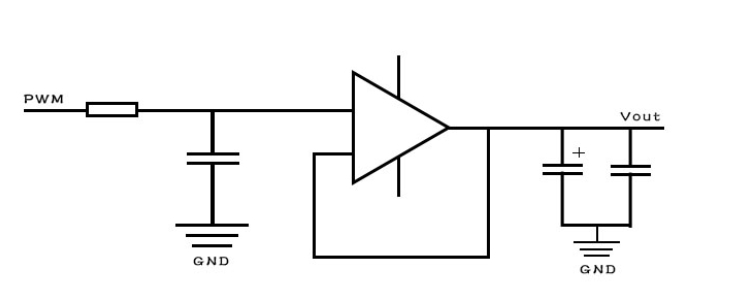
▲低通濾波器
2、平衡方法:
自適應濾波器:根據系統的運行狀態動態調整濾波器的截止頻率。在負載變化較大或動態響應要求較高的情況下,適當提高截止頻率;在穩態運行時,降低截止頻率以提高穩定性。
多級濾波器:使用多級濾波器,結合不同截止頻率的濾波器,既能有效去除高頻噪聲,又能保持一定的動態響應速度。
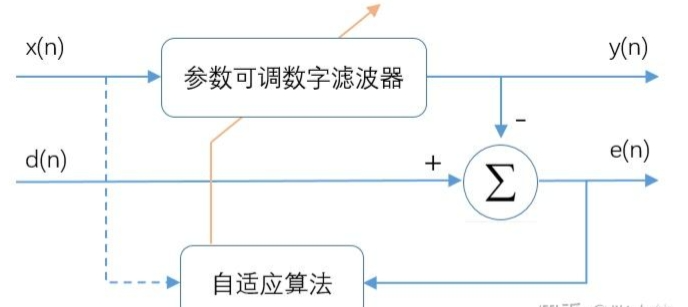
▲自適應濾波器
二、觀測器設計
無感FOC算法中常用的觀測器包括滑模觀測器(SMO)和卡爾曼濾波器(KF)。觀測器的設計參數對系統的動態響應和穩定性也有重要影響。
1. 滑模觀測器(SMO)
增益調整:通過調整滑模觀測器的增益,可以在動態響應和穩定性之間找到平衡。高增益可以提高動態響應速度,但可能導致系統不穩定;低增益可以提高穩定性,但響應速度會變慢。
飽和函數:使用飽和函數代替符號函數,可以有效抑制過大的抖動,提高系統的穩定性。
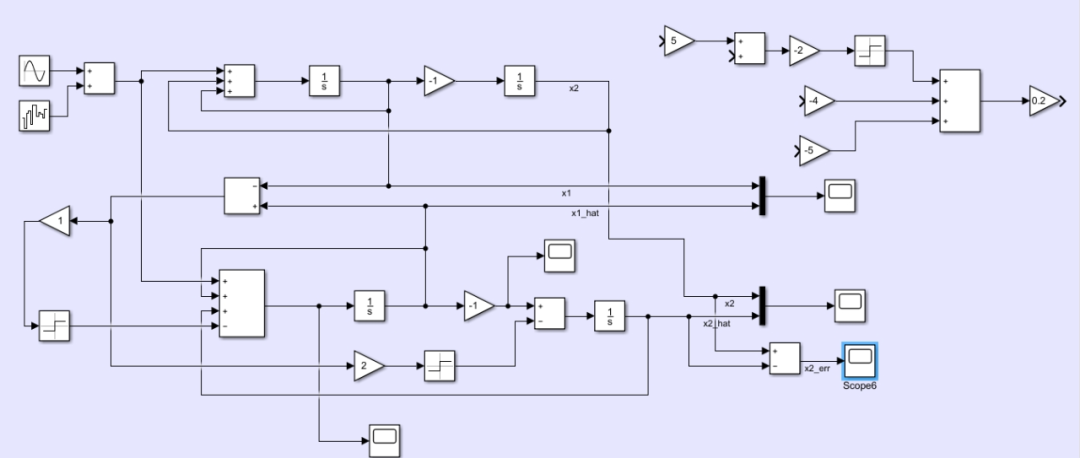
▲滑膜觀測器仿真
2. 卡爾曼濾波器(KF)
噪聲協方差矩陣:通過調整卡爾曼濾波器的噪聲協方差矩陣,可以在動態響應和穩定性之間找到平衡。適當增加過程噪聲協方差可以提高動態響應速度,但可能會引入更多的噪聲;適當增加測量噪聲協方差可以提高穩定性,但響應速度會變慢。
3、平衡方法:
自適應增益調整:根據系統的運行狀態動態調整觀測器的增益。在負載變化較大或動態響應要求較高的情況下,適當提高增益;在穩態運行時,降低增益以提高穩定性。
多觀測器融合:使用多觀測器融合的方法,結合不同增益的觀測器,既能提高動態響應速度,又能保持系統的穩定性。
三、系統建模與仿真
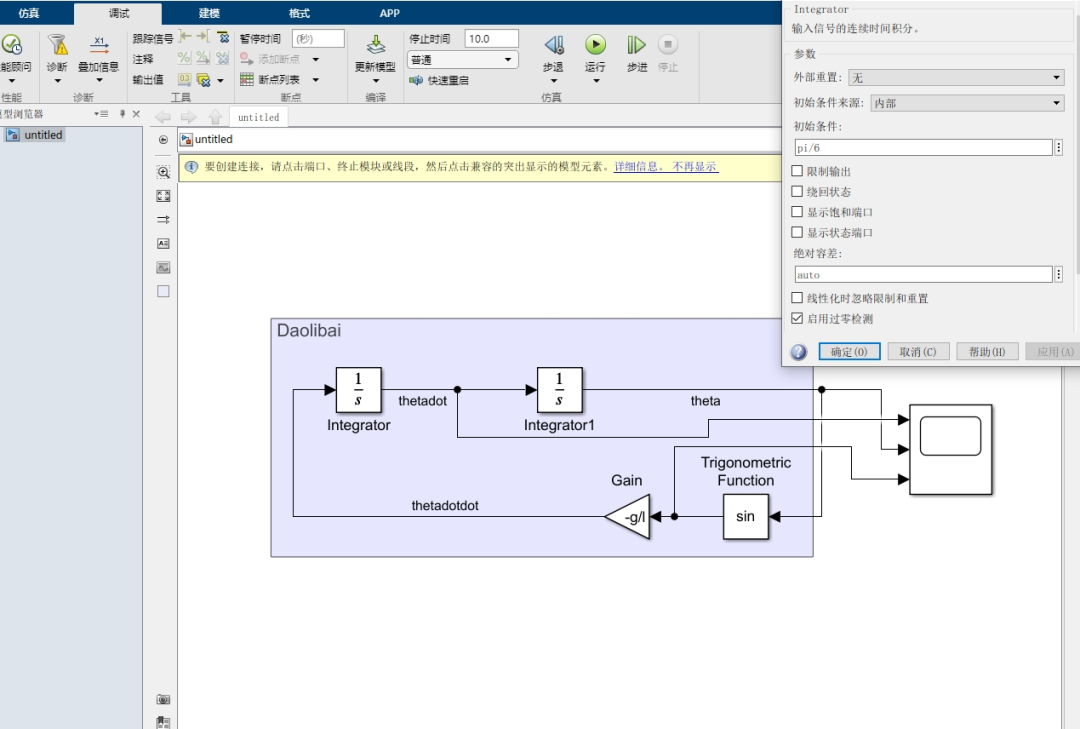
通過建立系統的精確數學模型,并在仿真環境中進行參數調整和性能測試,可以有效預測系統的動態響應和穩定性。仿真工具(如MATLAB/Simulink)提供了豐富的建模和仿真功能,可以幫助工程師在實際硬件調試之前,找到一組較為合理的參數。
平衡方法:
參數掃描:在仿真環境中,對PI控制器參數、濾波器參數、觀測器參數等進行掃描,找到一組在動態響應和穩定性之間平衡的參數。
性能指標優化:定義系統的性能指標(如超調量、調節時間、穩態誤差等),通過優化算法(如遺傳算法、粒子群優化算法等)自動調整參數,以達到最佳的性能平衡。
在無感FOC算法中,動態響應和穩定性之間的平衡是實現高性能電機控制的關鍵。通過合理設計濾波器、優化觀測器參數以及利用系統建模與仿真進行參數調整,可以有效解決動態響應與穩定性之間的矛盾。這些方法不僅能夠提高系統的整體性能,還能為實際工程應用提供有力支持。
-
濾波器
+關注
關注
162文章
8419瀏覽量
185946 -
電機控制
+關注
關注
3601文章
2138瀏覽量
278239 -
LPF
+關注
關注
0文章
14瀏覽量
7038 -
FOC技術
+關注
關注
0文章
2瀏覽量
1639
發布評論請先 登錄
求一種無感Foc電機控制算法
笙泉BLDC MCU: 應用于FOC無感控制
基于電流誤差和PLL估算的無感FOC算法MATLAB代碼生成技術直播資料
基于FOC無刷電機的按摩器方案以及PCBA介紹【其利天下技術開發有限公司】
基于KY32MT028主控的高速風筒PCBA方案【深圳市其利天下技術開發有限公司】
11萬轉無感FOC算法高速吹風筒方案【其利天下技術】
其利天下無刷水泵驅動方案性能參數細節

靜音、高效、智能,無刷電推剪驅動方案的技術亮點--其利天下

其利天下|各類風扇PCBA方案開發

無感FOC算法在電機啟動時具體如何優化性能?--【其利天下】

其利天下技術:用先進FOC驅動,重塑直流無刷水泵

其利天下FOC方案:為什么能讓直流無刷水泵更靜音、更節能、更可靠?




 工商網監
工商網監
評論