 一種完全由真空驅動的軟殼機器人
一種完全由真空驅動的軟殼機器人

最近,國外的科學家創造出了一種完全由真空驅動的軟殼機器人,它可以通過吸進和排除空氣,實現各種不同任務,比如爬垂直的墻面和抓取物體等。為了能夠讓這種機器人移動起來,內部的空氣必須要從各個部分中被吸走。收到人體肌肉收縮的啟發,當它真空的特性被啟動,單個軟性部分的組件就會被激活。
這種軟殼機器人可以利用吸力來抓取物體或者將自己粘在光滑的表面上,同時就可以完成各種各樣的任務,而這些都要感謝它獨特的真空特性。這種機器人可以用來被分配執行不同的任務,并且具有高度模塊化和多功能的特性,并且在研究和工業領域都將具有廣泛的應用前景。“我們所擁有的是一種具有完整功能的機器人,它完全由真空驅動,而這是前所未有的一種體驗。”瑞士EPFL的Matt Robertson表示。
“之前我們曾展示過同樣由真空驅動的單個部件,但是從未在完成的系統中使用過。”Robertson表示。真空動力組件是對這種機器人的一種補充,更重要的是,在使用的時候它非常安全。目前市面上大多數的機器人都是通過施加壓力來執行操作,比如持續向內部注入空氣。當然,這種高壓驅動的方式也會帶來安全隱患,在極端的情況下會有爆炸的可能。
相比之下,由真空驅動的動力裝置不僅安全柔軟,而且易于建造。EPFL的科學家Jamie Paik表示:“更重要的是,我們的軟性結構采用了即插即用的設計,因此可以通過相同的模塊組裝出完成不同任務的機器人。”它們可以被重新組合,適應不同的要求,比如爬行、抓取容器以及垂直爬行等。
如果由五個模塊組合的話,就可以像觸須一樣移動;而四個模塊組合到一起,則可以抓住某個物體然后擲向某個目標。而三個模塊可以讓機器人在地上爬行,兩個模塊則可以成為可以的墊腳,能夠在像玻璃一樣光滑的表面上固定。研究人員表示,這種機器人未來在移動和工業領域中,擁有非常巨大的應用前景。
-
機器人
+關注
關注
213文章
31079瀏覽量
222259
原文標題:能爬墻還能抓東西,真空驅動的軟殼機器人大有可為!
文章出處:【微信號:robotn,微信公眾號:產業大視野】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
探索RISC-V在機器人領域的潛力
繩子驅動的機器人,會是未來嗎?

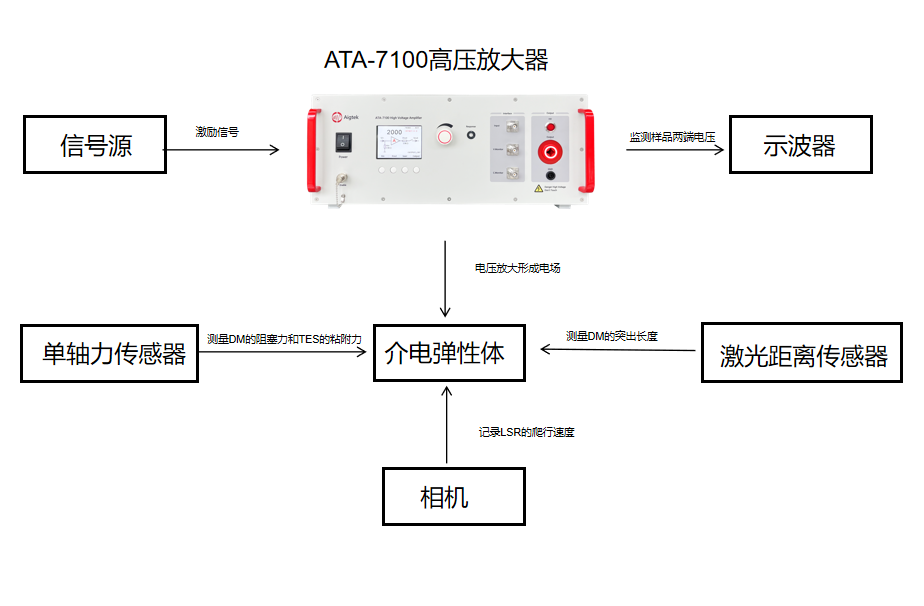
高壓放大器在介電彈性體制成的軟機器人研究中的應用
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
驅動服務機器人創新的核心技術

什么是機器人?追溯機器人技術的演變和未來

機器人關節模組:類型、設計、工作原理及應用

介電彈性體軟機器人研究:高壓放大器的應用實踐




 工商網監
工商網監
評論