 2025高端掃地機器人MOSFET選型分析:從分立器件到系統級能效革命
2025高端掃地機器人MOSFET選型分析:從分立器件到系統級能效革命

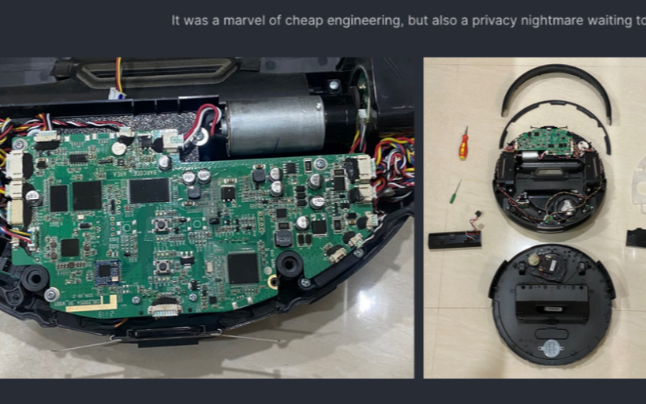
在2025年智能清潔設備激烈競爭中,旗艦級掃地機器人的性能邊界正被MOSFET技術重新定義。本文深度拆解最新一代產品的功率電子架構,揭示三大核心發現:
1、器件數量激增:單機MOSFET用量突破40顆,驅動、傳感、供電模塊的協同設計成為關鍵;
2、參數軍備競賽:RDS(on)進入亞毫歐時代,VBSEMI/英飛凌/TI等廠商競逐0.9mΩ極限;
3、失效模式升級:熱管理從“被動散熱”演進為“AI預測性溫控”,GaN與SiC技術開始滲透消費級場景。
透過這份技術圖譜,您將掌握下一代清潔機器人功率電子的設計密碼。
高端掃地機器人的性能飛躍依賴于功率電子器件的精密控制,其中MOSFET作為核心開關元件,直接影響電機效率、續航能力和系統穩定性。以下是基于2025年旗艦機型的全模塊技術拆解:
一、MOSFET的核心應用場景與選型邏輯
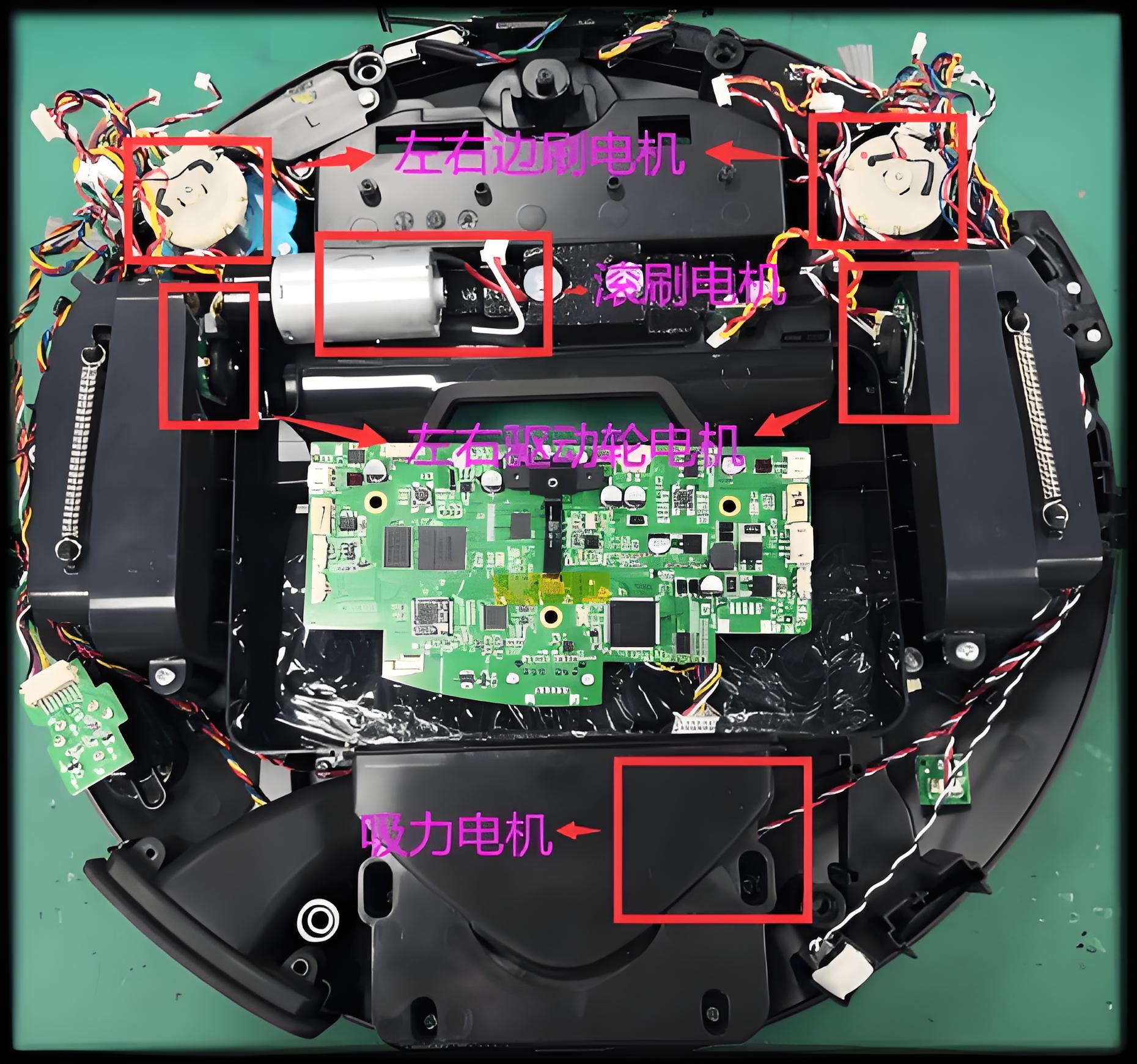
1. 多電機驅動系統
應用模塊:
主輪無刷電機(2顆,驅動移動)
邊刷有刷電機(2顆,側邊清掃)
雙滾刷電機(2顆,膠毛一體設計)
升降拖布電機(1顆,壓力調節)
MOSFET需求:
數量:每顆無刷電機需6顆MOSFET(三相全橋),有刷電機需4顆(H橋),總計約20-30顆。
關鍵參數:
耐壓≥30V(鋰電池供電峰值電壓)
持續電流10-20A(主輪電機瞬時負載)
RDS(on)<5mΩ(降低熱損耗,如VBGQA1400)
功能需求:
支持100W快充(20V/5A輸入,如VBGQF1402)
放電回路智能通斷(防過放)
MOSFET配置:
數量:4顆(充放電回路各2顆背靠背連接)
選型要點:
反向恢復時間(trr)<50ns(減少開關損耗)
VGS(th)1.8-2.5V(兼容低電壓MCU控制)
封裝:DFN3X3(如VBQF1202)
MOSFET角色:
負載開關:控制傳感器組電源通斷(如VB1240,SOT-23封裝)
數量:每傳感器組1-2顆,整機約8-12顆。
二、2025年高端機型MOSFET技術標桿

三、失效分析與可靠性設計
1、熱管理挑戰:
電機驅動MOSFET需配合銅基板散熱(如石頭G20的“石墨烯均熱層”)。
2、壽命測試標準:
連續10萬次開關循環后RDS(on)漂移<10%。
四、未來技術演進方向
1、寬禁帶半導體替代:SiC MOSFET在快充模塊的應用(效率提升5%)。
2、AI動態調參:根據地面阻力實時優化MOSFET開關頻率(如科沃斯X3的“EcoPower 3.0”算法)。
總結:2025年高端機型MOSFET用量達40-50顆,選型從“單一性能”轉向系統級協同設計,成本占比升至BOM的15%-20%。
審核編輯 黃宇
-
MOSFET
+關注
關注
151文章
9768瀏覽量
234051 -
分立器件
+關注
關注
5文章
266瀏覽量
22315 -
掃地機器人
+關注
關注
21文章
853瀏覽量
55794
發布評論請先 登錄
掃地機器人“叛變”了
五年磨一劍,大疆終于官宣ROMO掃地機器人

解鎖掃地機器人“類人智能”的時鐘密鑰

INDEMIND臟污識別技術賦能掃地機器人功能進化
掃地機器人傳感器電路:電容過濾地面顛簸帶來的 “信號噪聲”
晶振在掃地機器人中的核心作用
掃地機器人的幾種語音控制芯片方案介紹
大疆官宣入局,將重塑“掃地機器人”行業新格局?
基于上海貝嶺產品的掃地機器人應用方案
基于東芝產品的掃地機器人設計方案

中微半導掃地機器人解決方案介紹

鈞敏科技AM2355驅動芯片在掃地機器人中的應用
掃地機器人如何做自動化測試?




 工商網監
工商網監
評論