 如何破解GPU集群集合通信路徑的“黑盒”難題?
如何破解GPU集群集合通信路徑的“黑盒”難題?

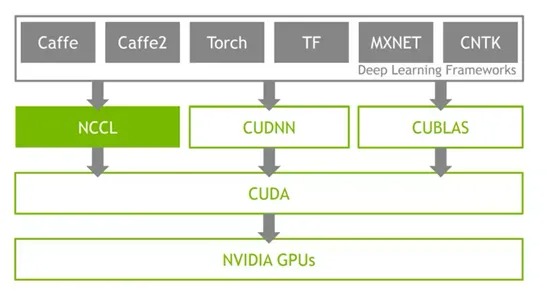
在分布式AI訓練場景中,GPU集合通信路徑是支撐多節點協同計算的核心基礎設施。通過集合通信庫(如NVIDIA NCCL、華為HCCL等),跨GPU的數據交換(AllReduce、Broadcast等操作)得以高效執行,從而實現大規模模型參數的同步與梯度聚合。
然而,隨著智算集群規模的擴展,通信路徑的復雜性呈指數級增長,暴露出以下技術難題。
路徑黑盒化:現有集合通信庫(Collective Communication Libraries, CCLs)對用戶屏蔽底層通信細節(如物理拓撲、網卡綁定策略、路由選擇),導致性能瓶頸難以定位。
異構環境兼容性:多廠商CCLs(如ACCL、TCCL)的差異化實現,增加了跨平臺部署與調優的復雜度。
動態資源適配不足:傳統靜態路由規劃無法適應動態負載變化,易造成網絡擁塞與帶寬利用率低下。
故障溯源低效:訓練中斷時,需人工排查模型、硬件、網絡多層級問題,MTTR(平均修復時間)顯著增加。
集合通信路徑的架構解析
通信路徑的層級劃分
GPU集合通信路徑涵蓋以下核心層級:
- 節點內通信:通過NVLink/PCIe實現多GPU間P2P直連,依賴CUDA驅動層優化。
- 跨節點通信:基于RDMA(如RoCEv2)協議,通過智能網卡(如ConnectX系列)與交換機構建低延遲、高吞吐的數據通道。
- 邏輯通信環:NCCL等庫根據硬件拓撲自動構建邏輯環形/樹形結構,優化數據流并行性。
現有方案的局限性
盡管NCCL通過拓撲感知算法優化通信效率,但其運行時仍存在以下缺陷:
- 路徑不可觀測:用戶無法獲取通信環的實際物理路徑(如交換機端口映射、QoS策略)。
- 配置僵化:缺少動態路由調整機制,無法感知網絡擁塞或鏈路故障。
- 診斷信息碎片化:日志分散于各節點,缺乏全局視圖與關聯分析能力。
EPS(E2E Path Scheduler,端到端路徑規劃)的技術實現
架構設計目標
EPS旨在打破集合通信的“黑盒”狀態,提供以下核心能力:
- 全路徑可視化:實時映射邏輯通信環至物理網絡拓撲。
- 智能路由優化:基于實時流量狀態生成最優路徑配置。
- 自動化運維:通過API驅動網絡設備策略下發,減少人工干預。
關鍵技術模塊
通信環解析與拓撲重構
EPS通過解析NCCL日志中的ncclTopoGraph結構,提取邏輯GPU通信組(如Ring、Tree),并關聯物理設備信息(GPU UUID、網卡端口號)。結合LLDP協議與交換機CLI查詢,動態構建端到端路徑拓撲圖(如圖1)。
 圖1:EPS通信環與物理拓撲的映射示意圖
圖1:EPS通信環與物理拓撲的映射示意圖路由規劃算法
采用混合式路徑選擇策略:
- 靜態權重分配:基于鏈路帶寬、延遲、丟包率構建代價模型。
- 動態負載均衡:集成Prometheus監控數據,實時感知隊列深度與ECN標記,觸發路徑重計算。
- 容災路由:預設多路徑冗余,在鏈路故障時自動切換至備份路徑。
如何使用 EPS?
安裝配置
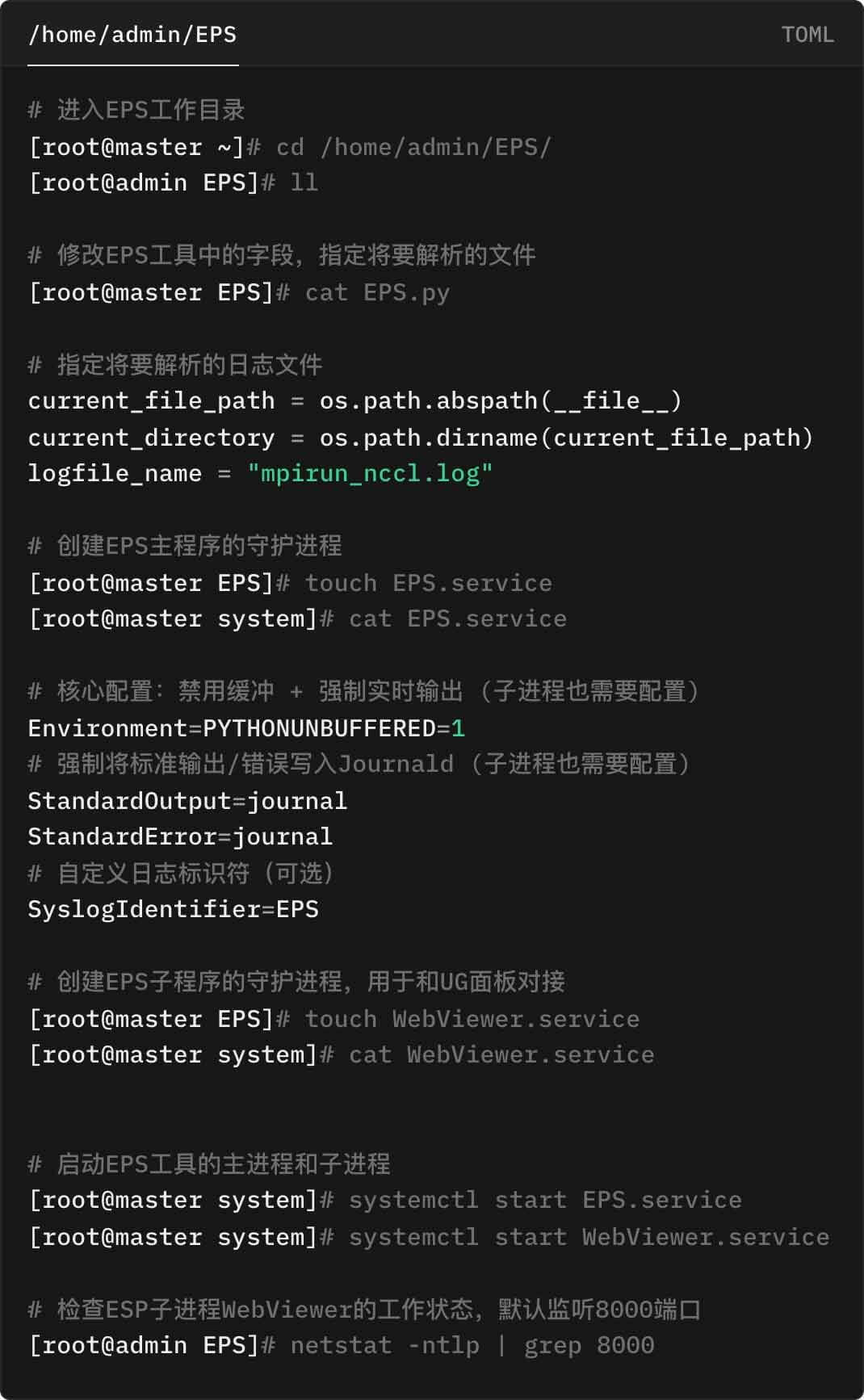
演示環境中的 Master 節點為一臺獨立的 CentOS 服務器,項目指定的工作目錄為 /home/admin/EPS
配置控制面板
演示使用 EasyRoCE Toolkit 內的統一監控面板(UG,Unified Glancer),在此之前需要提前完成該平臺的部署,請參閱:一文解讀開源開放生態下的RDMA網絡監控實踐 中的“監控平臺配置”部分。
我們只需要為 UG 再添加一個呈現 HTML 的 Pannel,并完成 HTML 源的配置(如下圖所示),EPS 解析出來的集合通信環信息就將作為各類 RDMA 網絡相關監控指標信息的補充,輔助集群設施調優決策。
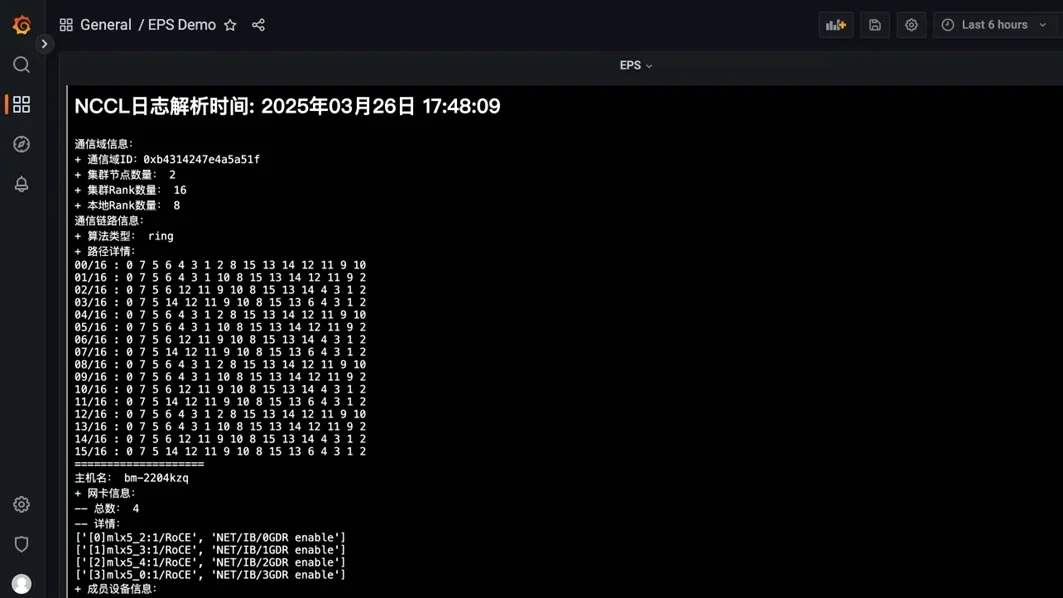
完成以上所有步驟,我們就可以在 UG 看到實時更新的集合通信庫運行信息,手動更新NCCL 日志文件,可以看到 UG 中呈現的解析信息也同步刷新。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
gpu
+關注
關注
28文章
5194瀏覽量
135450 -
AI
+關注
關注
91文章
39793瀏覽量
301404 -
分布式
+關注
關注
1文章
1093瀏覽量
76582
發布評論請先 登錄
相關推薦
熱點推薦
破解RDMA網絡“黑盒”:輕量化會話追蹤工具
在RDMA網絡運維面臨“黑盒”挑戰的背景下,星融元推出的RST工具通過無侵入捕獲CM報文,實現RDMA會話的可視化追蹤與全網路徑還原。該工具基于RFT與RPT雙模塊,支持從設備流表到全局拓撲的多維觀測,大幅降低運維定位成本,推動高性能網絡運維走向透明化與智能化。

CCLINKIE轉OPCUA協議!協議轉換網關一鍵破解車間異構設備互聯難題
協議西門子PLC集群、MES系統的聯動,而協議異構導致數據無法直接傳輸,造成生產參數監控滯后、設備狀態反饋不及時,嚴重影響生產效率與產品質量管控。 工業通訊網關 憑借CCLINKIE轉OPCUA核心能力,成為破解這一工業互聯難題

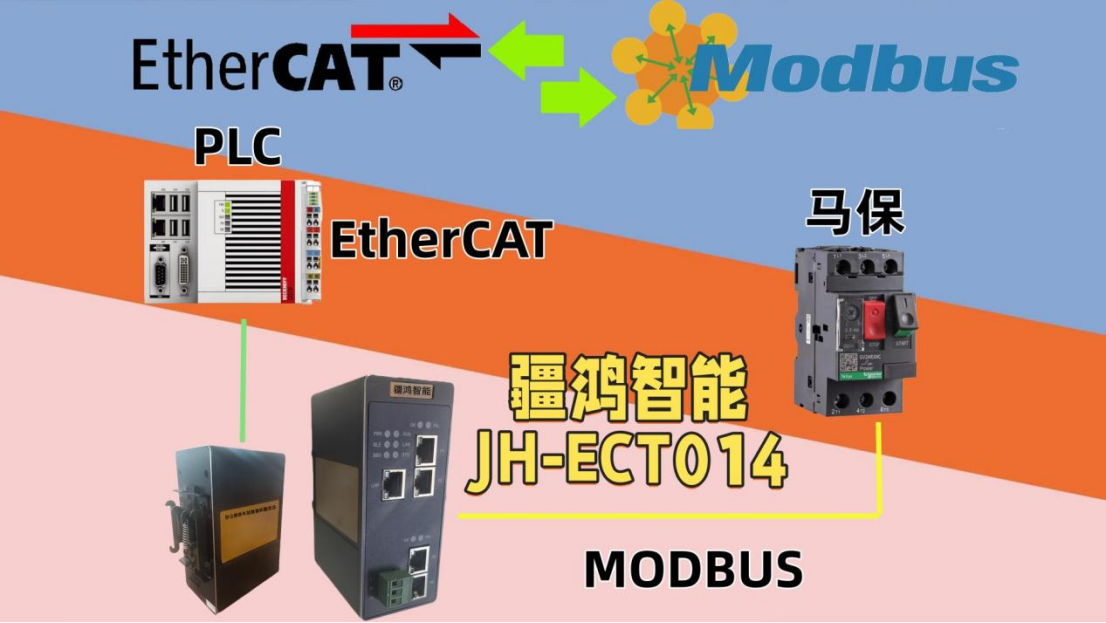
疆鴻智能ETHERCAT轉MODBUS TCP/IP,破解化工設備異構通信難題
疆鴻智能ETHERCAT轉MODBUS TCP/IP,破解化工設備異構通信難題 一、案例背景:化工生產中的協議異構挑戰 在現代化工生產體系中,實時、可靠的數據交互是保障安全與效率的核心。某大
福祿克BT520/521系列蓄電池測試儀破解行業運維難題
這不僅是管理痛點,更是安全風險。福祿克BT520/521系列蓄電池測試儀的序列模式,已在實際場景中成為破解這些難題的關鍵工具。
聯合通信與定位(JCAP):用無線電波丈量宇宙的“雙面劍“
矛盾的起點:通信與定位的"雙軌制"困境 在人類探索宇宙的征程中,通信與定位始終是兩大核心需求。然而,這兩個看似關聯的領域卻長期遵循著平行發展的路徑:GPS系統專注于提供高精度定位服務,通信
泰科電子連接器破解戈壁荒漠新能源光伏治沙難題
如何破解戈壁荒漠新能源光伏治沙難題?在八月落幕的2025陜西新能源電力發展大會上,TE Connectivity(以下簡稱“TE”)受邀作主題報告《TE高性能電力解決方案為沙戈荒光儲項目保駕護航》,并給出了TE的答案。
破解光伏用電平衡難題:從逆流定義、防逆流要求到安科瑞電表應用
伴隨全球能源轉型進程加速,無論是戶用場景的日常用電需求,還是工商業場景的規模化能耗管理,“光伏發電與用電平衡” 的統籌難題愈發凸顯。如何以高效、安全且經濟的路徑,實現這一平衡的精細化管控,破解能源供需匹配的核心痛點,正逐步成為行


云翎智能巡檢終端:以“北斗+”破解森林巡檢“最后一公里”難題
終端通過集成單北斗高精度定位、多模態感知融合、自主可控通信等技術,構建起“空天地一體化”巡檢體系,為破解這一難題提供了智能化解決方案。云翎智能單北斗巡檢終端一、技術

AGV通信第2期 AGV集群智能路徑規劃解決方案
在智能制造加速發展的背景下,AGV作為智慧物流的核心載體,其路徑規劃的智能化水平直接影響工廠的運作效率。在工廠物流升級過程中,企業面臨以下技術挑戰: ? 動態環境適應:復雜工況下需實時避障并保持最優

高校宿舍改造指南:智能水電計費系統如何破解管理難題?
安科瑞解決方案,校園管理難題一應俱全,全方位破解。采用智能硬件+云平臺,實現高效管理閉環精準計量,安全防控,一鍵拉合閘,多支付,后付費模式,能耗分析,賦能綠色校園實時監測,成功案例,降低管理難度,提高學生滿意度。




 工商網監
工商網監
評論