 案例 基于CFD仿真的潛航器不同航行狀態下阻力特性模擬與評估
案例 基于CFD仿真的潛航器不同航行狀態下阻力特性模擬與評估

1、簡述
水下航行器(UUV)作為一種海洋探測裝備,具備體積小、隱身性好、機動性強、成本低和可組網等優點。這些特點使得它們在海洋探索、科學研究、軍事偵察等領域發揮著重要作用,其在現代海洋探測和軍事領域中占據著越來越重要的地位。
水下航行器在航行時,會受到水流的阻力,其在航行過程中的阻力性能會影響其快速性, 水下航行器的快速性是評價其綜合航行性能的一項重要戰術技術指標。隨著各種反潛設備的發展,水下航行器的航行安全問題不容忽視,提高航行器的快速性已經成為各國重要的軍事研究課題,因而對其阻力的預報精度也有了更高的要求,suboff潛艇作為一種常見的水下航行器模型,曾在國際上被各大海洋強國進行充分的實驗與數值模擬研究,本文以suboff模型對水下航行器阻力計算展開介紹。
2、計算方法
2.1幾何模型
在本研究中,在數值模擬中主要考慮的模型為全附體 SUBOFF 模型(配置8)[1]。設計的 CAD 模型的尺寸如圖1所示。SUBOFF 模型是一個軸對稱船體,總長度為 4.356 m,等直段最大直徑 D 為 0.508 m。SUBOFF 型號在船體上方有一個艦橋,其前緣位于距船頭 0.924 米(1.820D)處,后緣距離 1.293 米(2.545D),因此艦橋的總長度為 0.368 米(0.724D)。船尾有四個相同的附件,呈“十”字形布置(垂直和水平控制平面)。
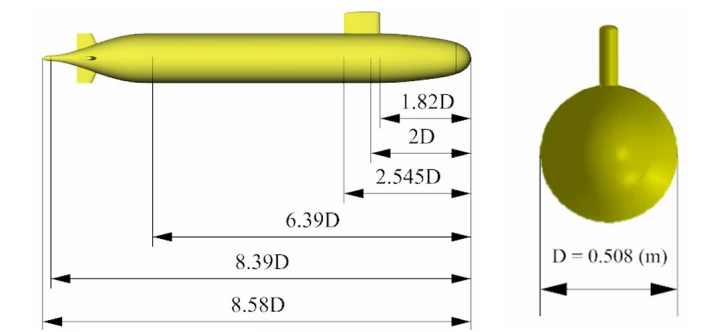 圖 1 具有完全附體suboff潛艇模型/側視圖(左)和正視圖(右)
圖 1 具有完全附體suboff潛艇模型/側視圖(左)和正視圖(右)
2.2 數值方法
在本研究中,數值模擬的湍流雷諾數均在107以上,采用了RANS方程求解,其以笛卡爾張量形式書寫的連續性和動量方程分別如下:

其中,ρ 是體積分數平均密度;u 是流動速度,可以分解為均值 和波動分量u’;p 是壓力項;μ 是動力粘度。
方程(2)中的最后一項表示湍流的影響,稱為雷諾應力。基于 Boussinesq 假說 [2] 的雷諾應力與平均速度梯度相關,能夠以如下公式給出:

其中,μt表示湍流粘度,k表示動能,在湍流求解時,需選擇合適的湍流模型,以構建μt和k相關的湍流封閉方程。
3、深水自航
潛艇在深水區的潛航實際上是一個典型的繞流問題,對于繞流問題以及關于阻力問題的求解,一般采用的湍流模型為SST k-ω湍流模型,然而在關于該問題的求解中,采用可實現的k-ε模型較SST k-ω湍流模型所得計算結果與實驗值吻合得更好,這可能是流動雷諾數較大引起的。
在計算過程中選取的計算域如下圖 2所示(實際計算時采用半模計算)。計算域被設計為圓柱形,確保流動場的長度適合捕捉流動場特征,例如在任何速度下潛體后面的尾流效應。數計算域的長度設置為23.96米(約為艇長長度的5.5倍,即5.5L)。Moon等人[37]指出,對于潛體的CFD建模,流動場的寬度和高度可以設置為其直徑的七倍(7D)。換句話說,如果計算域的高度和寬度都設置為模型直徑的19倍(19D),數值流動場的模擬結果將進一步確保不受計算域邊界的影響。同時圖3顯示了速度入口與壓力出口(B.C.1和B.C.4)作為流體域兩端的進/出口邊界條件。同時,在外部流體區域的外邊界上確定了自由滑移壁(B.C.2)。為了考慮粘性流動對剛體的影響,無滑移壁邊界條件(B.C.3)應用于內部流體區域中的潛體表面。
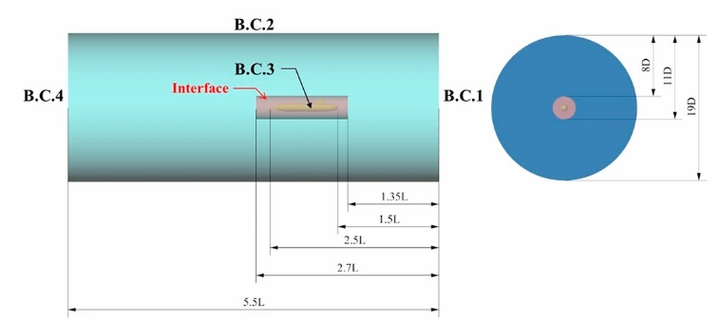 圖 2 計算域的側視圖(左)和前視圖(右)
圖 2 計算域的側視圖(左)和前視圖(右)
對于CFD仿真過程中的網格收斂性問題,分別采用了五套不同的網格參數進行計算驗證,表 1給出了五套不同網格的計算結果,可以發現給定的五套網格計算結果的最大偏差在0.6%,最終選用的網格為網格3,圖 3給出了艇體壁面網格、艇體附近對稱面以及圍殼前緣的壁面網格示意簡圖。
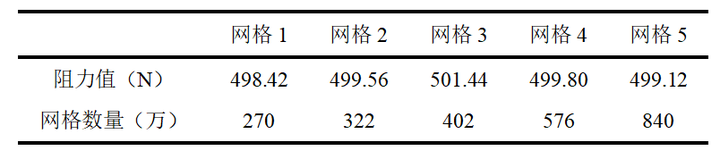 表 1 網格收斂性驗證
表 1 網格收斂性驗證 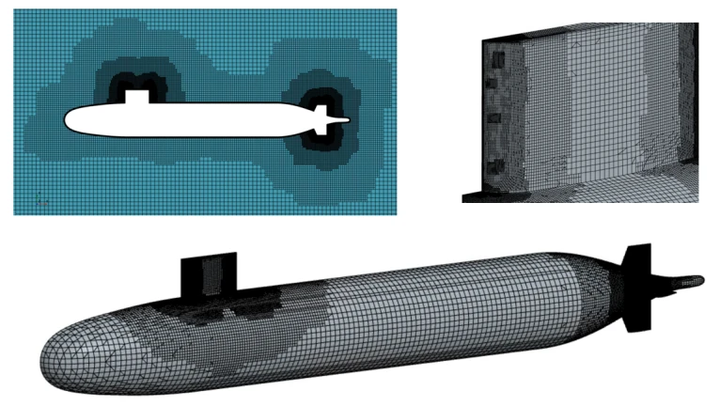 圖 3 網格示意簡圖
圖 3 網格示意簡圖
圖 4給出了各不同航速下,計算值與實驗值的對比圖,具體數據可見表 2,可以發現各航速下計算值均比實驗值偏小,最大偏差在5%以內。
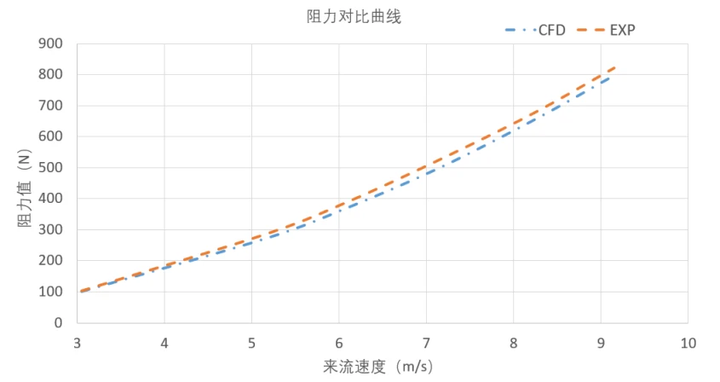 圖 4 計算值與實驗值對比曲線
圖 4 計算值與實驗值對比曲線 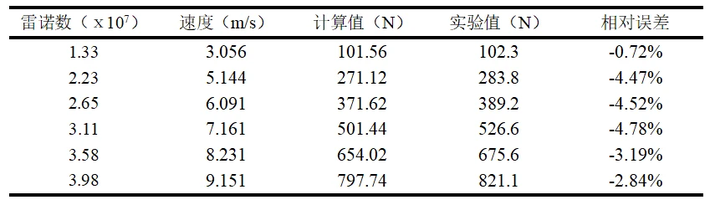 表 2 計算值與實驗值數據對比
表 2 計算值與實驗值數據對比
圖 5給出了不同航速下,艇體上的壓力分布以及中心對稱面上的速度分布,從圖中不難發現,航行速度的變化對淹沒艇體周圍的壓力分布影響不大。壓力最高的區域是艇體頭部、圍殼的前緣和尾舵的前緣。此外,在流速加快的地方,如艇體頭部、圍殼和尾舵附近,觀察到了低壓區,而在中部區域沒有明顯的壓力變化。
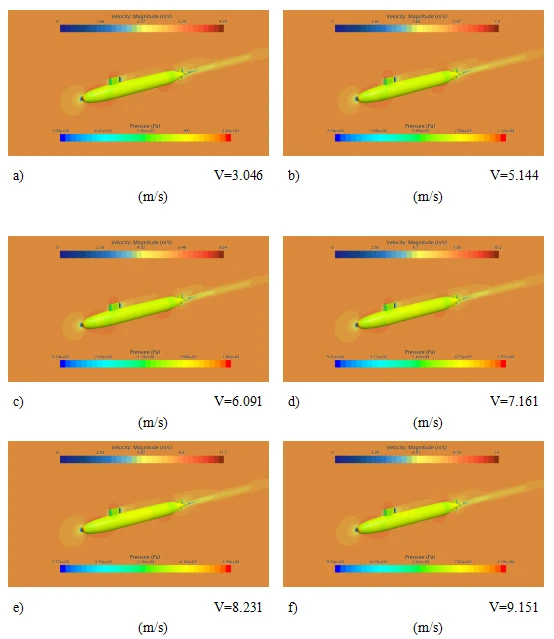 圖 5 不同航速下,艇體上的壓力分布以及中心對稱面上的速度分布
圖 5 不同航速下,艇體上的壓力分布以及中心對稱面上的速度分布
4、水面附近的自航
潛艇水面附近的自航可以分為水面下自由航行與水面上自由航行,其區別為艇體部分是否存在裸露于空氣中的部分,其計算域如下圖 6所示。
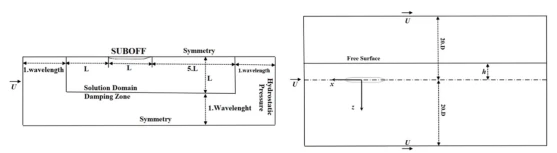 圖 6 潛艇水面附近自航計算域示意圖(h> 0:水下,h<0:水上)
圖 6 潛艇水面附近自航計算域示意圖(h> 0:水下,h<0:水上)
其中波長的計算可以由以下公式計算得出,當Fr=0.462,L=4.356m時,計算得到的波長λ=5.842m。

由于僅找到了裸艇體在水面下自航時的實驗數據,因此以裸艇體模型展開計算與實驗進行對比,表3給出了計算值與實驗值的結果對比,計算值較實驗值吻合較好,計算值偏小約7%。圖7給出了對應的自由液面位置云圖。
 表 3 計算值與實驗值的結果對比(裸艇體)
表 3 計算值與實驗值的結果對比(裸艇體) 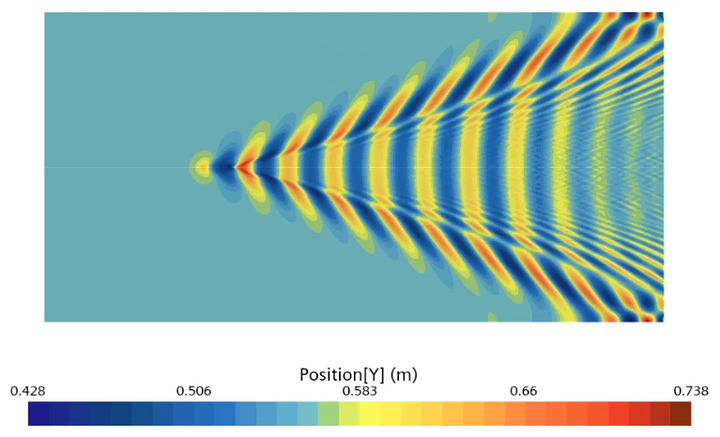 圖 7 自由液面位置云圖(水下)
圖 7 自由液面位置云圖(水下)
同樣的,采用相同的方式對全附體模型建模,計算其水面上自由航行情況下的自由液面位置如下圖 8所示。
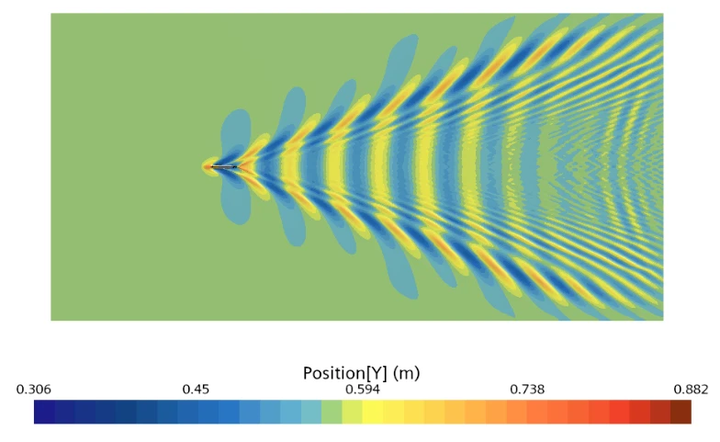 圖 8 自由液面位置云圖(水上)
圖 8 自由液面位置云圖(水上)
參考文獻
[1] Roddy, R.F. Investigation of the Stability and Control Characteristics of Several Configurations of the DARPA SUBOFFModel (DTRC Model. 5470) from Captive-Model Experiments; David Taylor Research Center Bethesda MDShipHydromechanics Dept: Annapolis, MD, USA, 1990.
[2] Hinze, J. Turbulence; McGraw-Hill Publishing Co.: New York, NY, USA, 1975.
審核編輯 黃宇
-
仿真
+關注
關注
55文章
4525瀏覽量
138583 -
CFD
+關注
關注
1文章
172瀏覽量
19552
發布評論請先 登錄
使用Fluidyn-MP軟件實現旋風分離器CFD模擬

Altair CFD 以技術賦能工程創新?
Simcenter FLOEFD for PTC Creo:CAD完全嵌入式計算流體力學(CFD)軟件

不同光照模擬下的車載 AR-HUD 顏色可見性評估

Simcenter FLOEFD for CATIA V5:CAD嵌入式前置計算流體力學(CFD)軟件
新思科技重新定義模擬與混合信號芯片設計模式
FLOEFD:告別低效CFD分析!
Simcenter FLOEFD for Siemens NX:CAD 嵌入式前置計算流體力學(CFD)軟件



 工商網監
工商網監
評論