 伺服系統穩定性提升技術 伺服系統編碼器的工作原理
伺服系統穩定性提升技術 伺服系統編碼器的工作原理

伺服系統是現代工業自動化和精密控制領域中不可或缺的組成部分。它們通常由電機、驅動器、控制器和編碼器等組成,用于實現精確的位置、速度和力矩控制。為了提升伺服系統的穩定性,工程師們開發了多種技術。以下是一些關鍵技術:
1. 先進的控制算法
- PID控制 :比例-積分-微分控制是最常用的控制算法之一,通過調整比例、積分和微分參數,可以優化系統的響應速度和穩定性。
- 自適應控制 :這種控制策略能夠根據系統的實時性能調整控制參數,以適應外部擾動和系統參數的變化。
- 滑模控制 :通過設計滑動面和控制律,使系統狀態在期望軌跡上滑動,增強系統的魯棒性。
2. 編碼器反饋
編碼器是伺服系統中的關鍵組件,用于提供精確的位置和速度反饋。編碼器的精度和響應速度直接影響伺服系統的穩定性。
3. 電機和驅動器優化
- 電機設計 :使用高性能電機,如永磁同步電機(PMSM)或無刷直流電機(BLDC),可以提高系統的動態響應和效率。
- 驅動器技術 :采用高功率密度和高效率的驅動器,減少熱損耗,提高系統的穩定性和壽命。
4. 系統診斷和預測維護
5. 軟件和硬件冗余
- 冗余控制 :在關鍵控制環節設置冗余系統,以確保在主系統發生故障時,備用系統能夠無縫接管。
- 硬件冗余 :在關鍵硬件組件中使用冗余設計,如雙編碼器系統,以提高系統的可靠性。
伺服系統編碼器的工作原理
編碼器是伺服系統中用于測量電機軸位置和速度的傳感器。以下是編碼器的工作原理:
1. 增量式編碼器
- 工作原理 :增量式編碼器通過測量電機軸的轉動來提供位置和速度信息。它通常有兩個輸出信號,稱為A和B相,它們相位相差90度。通過計數這些脈沖,可以確定電機軸的轉動位置。
- 優點 :成本較低,響應速度快,適合于需要連續位置反饋的應用。
- 缺點 :需要參考點來確定絕對位置,斷電后會丟失位置信息。
2. 絕對式編碼器
- 工作原理 :絕對式編碼器能夠提供電機軸的確切位置,而不需要參考點。它通常使用多圈編碼器來測量電機軸的完整旋轉,并通過電子電路將這些信息轉換為數字信號。
- 優點 :即使在斷電后也能保持位置信息,適合于需要精確絕對位置的應用。
- 缺點 :成本較高,響應速度可能不如增量式編碼器。
3. 編碼器信號處理
- 信號解調 :編碼器輸出的信號需要通過解調器轉換為數字信號,以便控制器可以讀取和處理。
- 濾波 :為了減少噪聲和提高信號質量,編碼器信號通常需要通過低通濾波器進行處理。
4. 編碼器接口
- 接口類型 :編碼器與控制器之間的接口可以是模擬的(如電壓或電流信號)或數字的(如SSI、EnDat或EtherCAT)。
- 同步 :為了確保編碼器信號與電機軸的轉動同步,編碼器通常與電機軸直接連接或通過同步皮帶連接。
通過這些技術,伺服系統的穩定性得到了顯著提升,使得現代工業自動化系統能夠實現更高的精度和可靠性。編碼器作為伺服系統中的關鍵組件,其精確的反饋對于實現這些目標至關重要。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
驅動器
+關注
關注
54文章
9083瀏覽量
155545 -
編碼器
+關注
關注
45文章
3953瀏覽量
142650 -
伺服系統
+關注
關注
14文章
606瀏覽量
41791 -
工業自動化
+關注
關注
17文章
3129瀏覽量
69894
發布評論請先 登錄
相關推薦
熱點推薦
提高步進伺服系統精度的措施
步進伺服系統作為現代工業自動化領域中的重要執行元件,其精度直接影響設備加工質量與生產效率。隨著智能制造對運動控制要求的不斷提高,如何提升步進伺服系統的精度成為工程師關注的核心問題。本文將從機械結構優化、控制策略改進、誤差補償

麥歌恩磁編碼器異常對伺服系統運行影響分析
麥歌恩磁編碼器作為伺服系統的“感知核心”,承擔三大關鍵角色:一是位置反饋,為位置環提供實時轉子位置信號,保障定位精度;二是速度解算,通過相鄰位置信號的時間差計算電機轉速,支撐速度環閉環調節;三是換向
伺服系統的常見故障和診斷方法
伺服系統作為現代工業自動化中的核心部件,廣泛應用于數控機床、機器人、包裝機械等領域。其高精度、快速響應的特性對設備性能至關重要,但復雜的結構也使得故障診斷成為維護難點。本文將系統分析伺服系統的常見故障類型、診斷方法及預防措施,為
ADI Trinamic如何讓伺服系統開發化繁為簡
“剛搞定FOC算法調試,又卡在編碼器協議解碼;好不容易湊齊分立器件,卻發現系統功耗超標”——這大概是不少伺服系統開發者的日常。隨著設備中的電機數量日漸增多,傳統開發模式下的硬件堆疊、軟件繁瑣、調試

伺服增量編碼器:工業自動化的精密之眼
在智能制造的浪潮中,伺服系統作為工業自動化的核心驅動單元,其性能直接影響著設備精度、效率與穩定性。而伺服增量編碼器,作為伺服系統的“精密之眼
MT6816磁編碼器的伺服系統小型化與高性價比設計
在工業自動化和機器人技術領域,伺服系統的性能直接影響設備的精度和響應速度。作為伺服系統的核心部件,磁編碼器的性能優劣直接決定了整個系統的表現

多摩川17位絕對式編碼器實現伺服系統納米級定位精度
在工業自動化的浪潮中,伺服系統的定位精度就像是一把精準的手術刀,決定著生產的質量和效率。而多摩川 17 位絕對式編碼器,無疑是這把手術刀上最為鋒利的刃口,它實現了伺服系統納米級的定位精度,為工業生產帶來了質的飛躍

網絡化多電機伺服系統監控終端設計
穩定可靠的多功能監控終端很有必要。
本文設計了一種基于CAN總線和PC/104嵌人式計算機的多電機伺服系統監控終端。可設置各電機的工作模式和控制器參數,通過圖形方式實時顯示負載位置、各
發表于 06-23 07:15
什么是伺服電機編碼器?作用/關鍵技術/選型等一起看看吧!
什么是伺服電機編碼器?
伺服電機編碼器是伺服系統中的核心反饋元件,用于實時檢測電機的轉速、位置、角度等參數,并將信號反饋給控制

伺服系統和PLC各自在什么場合使用
、銑削、鉆孔等高精度加工。 案例 :伺服系統控制刀具的精確移動,實現±0.001mm的加工精度。 機器人關節控制 場景 :工業機器人、協作機器人(如焊接、裝配、搬運)。 案例 :伺服電機驅動機器人手臂的旋轉和伸縮,確保動作精準、穩定
TMR的MT9523傳感芯片在工業伺服系統動態精度補償中應用
在工業自動化領域,伺服系統的動態精度直接決定了設備性能的上限。隨著工業4.0時代的深入發展,傳統的光電編碼器和磁編碼器在高速、高精度場景中逐漸暴露出響應延遲和抗干擾不足的瓶頸。而基于隧道磁阻效應
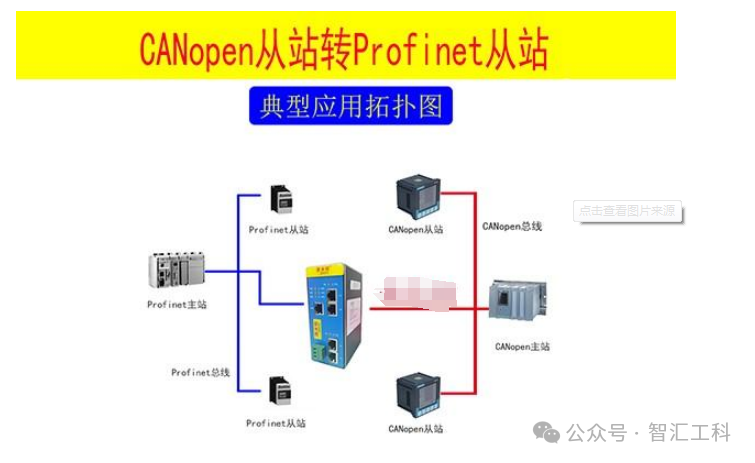
CANOpen轉PROFINET網關連接低壓伺服系統
CANOpen轉PROFINET網關連接低壓伺服系統是一個在工業自動化領域中常見的應用場景,以下是對該連接過程的詳細解析: 一、準備工作 1. 硬件準備: ● CANOpen轉PROFINET網關
永磁同步電機伺服系統PI參數整定
在永磁同步電機伺服系統電流、轉速控制中,通常采用的 PI 控制器與電流環、轉速環的穩定性和動 態性能緊密相關 。通過分析伺服系統的限制條件和參數特性,論述了電流環、轉速環控制指標的設定
發表于 03-20 12:59
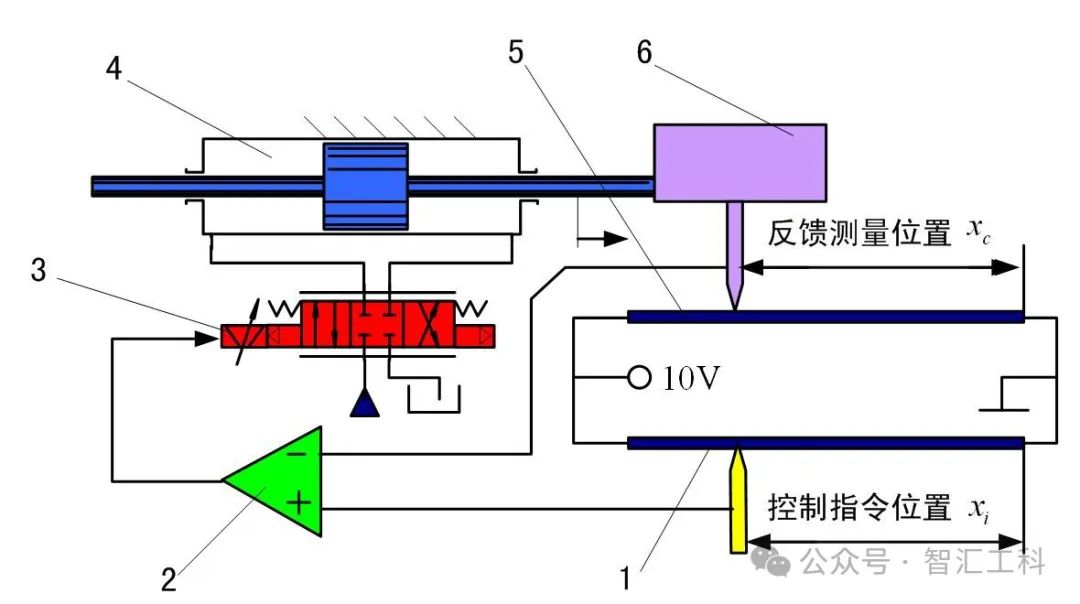
液壓伺服系統工作原理液及優缺點
液壓伺服系統是一種通過調節液壓元件的流量和壓力來實現對負載的位置、速度和力的精確控制的系統。以下是對其工作原理及優缺點的詳細分析: 一、工作原理 液壓



 工商網監
工商網監
評論