") 使用ROS機(jī)器人技術(shù)和SOA(面向服務(wù)架構(gòu))推進(jìn)ADAS原型設(shè)計(jì)
使用ROS機(jī)器人技術(shù)和SOA(面向服務(wù)架構(gòu))推進(jìn)ADAS原型設(shè)計(jì)

汽車設(shè)計(jì)的創(chuàng)新是一種持續(xù)的驅(qū)動力,每代汽車都會出現(xiàn)新的特性和性能。在不斷發(fā)展的汽車技術(shù)環(huán)境中,雷諾率先采用面向服務(wù)架構(gòu) (SOA) 來滿足現(xiàn)代車輛系統(tǒng)的需求。這種架構(gòu)方法代表了從傳統(tǒng)框架到模塊化、靈活設(shè)計(jì)的根本轉(zhuǎn)變。靈活性對于集成自動駕駛等復(fù)雜功能至關(guān)重要。SOA 允許將汽車系統(tǒng)分解為通過網(wǎng)絡(luò)進(jìn)行通信的單個服務(wù),從而實(shí)現(xiàn)更具可擴(kuò)展性和可重用的組件。這一點(diǎn)尤為重要,因?yàn)檐囕v變得越來越像“輪子上的計(jì)算機(jī)”,需要快速的開發(fā)周期和更大的靈活性來納入新技術(shù)或更新,而無需徹底改造整個系統(tǒng)。現(xiàn)代汽車系統(tǒng)日益復(fù)雜,擁有眾多必須協(xié)同運(yùn)行的傳感器和執(zhí)行器,這推動了雷諾向 SOA 的轉(zhuǎn)型。采用 SOA 允許雷諾獨(dú)立開發(fā)和測試不同的車輛部件,同時仍確保它們無縫協(xié)作。
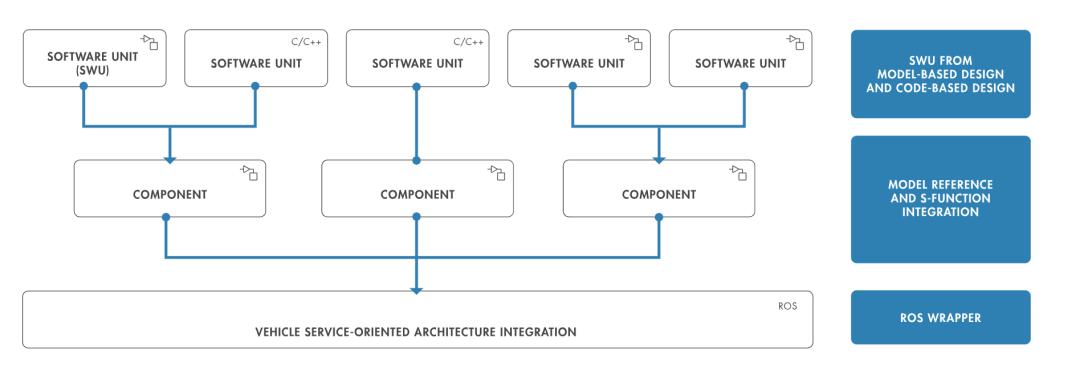
從 SWU 到車輛 SOA 應(yīng)用:該應(yīng)用程序包含一個或多個 SWU 和客戶端呼叫者。▼
汽車設(shè)計(jì)機(jī)器人工具
為了促進(jìn)這一轉(zhuǎn)變,雷諾開發(fā)了一個系統(tǒng),可以在硬件上實(shí)現(xiàn)任何東西之前進(jìn)行快速、獨(dú)立的測試和原型設(shè)計(jì)。Simulink 產(chǎn)品幫助雷諾簡化了其與軟件部門的工作并將其組合成完整的應(yīng)用程序,同時考慮轉(zhuǎn)向基于 SOA 的未來。雷諾采用 ROS Toolbox 和 Simulink 等集成先進(jìn)開發(fā)工具來滿足這一工程需求。機(jī)器人操作系統(tǒng) (ROS) 傳統(tǒng)上與機(jī)器人技術(shù)相關(guān),它提供了一個支持自動駕駛汽車開發(fā)的強(qiáng)大框架,包括允許各種軟件組件之間進(jìn)行有效通信的中間件功能。這種集成可以實(shí)現(xiàn)高效的原型設(shè)計(jì),尤其是在高級駕駛輔助系統(tǒng) (ADAS) 測試程序中。Simulink 是雷諾工作流程中至關(guān)重要的集成工具,將基于軟件的設(shè)計(jì)與基于模型的設(shè)計(jì)連接起來。ROS Toolbox 與 Simulink 的使用使雷諾能夠?qū)?ROS 作為高效原型設(shè)計(jì)的中間件,特別是在增強(qiáng)其 ADAS 測試程序方面。
由 Pierre Muratory 領(lǐng)導(dǎo)的集成團(tuán)隊(duì)專注于將 Simulink 模型部署到各種目標(biāo)上,包括基于 ROS 的原型平臺和生產(chǎn) AUTOSAR 平臺,后者是車輛軟件架構(gòu)的全球標(biāo)準(zhǔn)。團(tuán)隊(duì)進(jìn)行持續(xù)集成和持續(xù)開發(fā) (CI/CD),每當(dāng)做出更改時就會自動更新每個目標(biāo)的管道。Muratory 表示:“對于開發(fā)人員來說,使用 Simulink 的優(yōu)勢在于它完全不受平臺和目標(biāo)的影響。我們使用 Simulink 作為跨平臺工具,將 Simulink 模型中的相同代碼源部署到不同的平臺上。”這種由 Simulink、軟件工廠、CI/CD 管道和自動跨平臺 ROS 代碼生成支持的集成流程使雷諾能夠從開發(fā)人員的模型發(fā)布快速過渡到運(yùn)行用于車輛原型設(shè)計(jì)和測試的集成代碼。Muratory 表示:“使用 Simulink 和 ROS Toolbox 的持續(xù)集成流程使我們能夠在不到一個小時的時間內(nèi)從開發(fā)人員的發(fā)布到原型設(shè)計(jì)并在真實(shí)目標(biāo)上進(jìn)行部署。”將周期時間從幾天或幾周顯著縮短至僅僅一小時,對于雷諾的 ADAS 原型設(shè)計(jì)和早期功能驗(yàn)證工作來說具有重大改變。這一加速過程由 Muratory 集成團(tuán)隊(duì)自動生成的代碼實(shí)現(xiàn),使工程師能夠快速啟動 ROS 節(jié)點(diǎn),以便在生產(chǎn)推出之前測試尖端功能。Pascal Bedouet 領(lǐng)導(dǎo)的團(tuán)隊(duì)充分利用了這種靈活性,專注于利用 ROS 基礎(chǔ)設(shè)施實(shí)現(xiàn)高級通信和 ADAS 原型設(shè)計(jì)。
采用 ROS 允許開發(fā)人員輕松地將開發(fā)人員 Simulink 模型與測試車輛集成。ROS 架構(gòu)也與 SOA 原則非常契合,這使得雷諾能夠在進(jìn)行生產(chǎn)部署之前在 ROS 上測試未來面向服務(wù)的軟件設(shè)計(jì)。在 ROS 框架上進(jìn)行的測試可以確保其基于分布式服務(wù)的架構(gòu)將在即將推出的 SOA 車輛平臺上按預(yù)期運(yùn)行。
利用 ROS 增強(qiáng)溝通
雷諾也采用了 ROS 2。它是 ROS 的升級版本,支持 ROS 的非營利組織 Open Robotics 計(jì)劃在不久的將來停止對其的支持。ROS 2 為汽車設(shè)計(jì)提供了顯著的優(yōu)勢。它支持對于自動駕駛功能至關(guān)重要的實(shí)時操作,并包含先進(jìn)的中間件功能,有助于在車輛的互連系統(tǒng)之間實(shí)現(xiàn)更可靠的數(shù)據(jù)分發(fā),這是早期版本的 ROS 無法實(shí)現(xiàn)的。Bedouet 表示:“現(xiàn)在有了 ROS 2 和 DDS(數(shù)據(jù)分發(fā)服務(wù))等新中間件,我們今天就能夠達(dá)到并滿足實(shí)時性能。”MathWorks 為雷諾的轉(zhuǎn)型提供了支持,包括與工程團(tuán)隊(duì)密切合作,將工具箱中的功能整合到 SOA 中。其中包括為系統(tǒng)的不同組件創(chuàng)建更多自定義消息、設(shè)計(jì) Simulink ROS 2 服務(wù)器塊以及滿足雷諾的特定實(shí)時要求。通過與 MathWorks 的密切合作,雷諾克服了這些挑戰(zhàn),并且沒有造成重大延誤。Muratory 表示:“采用 SOA 對雷諾來說是一項(xiàng)戰(zhàn)略舉措,而 Simulink 對 ROS 2 服務(wù)服務(wù)器的關(guān)鍵支持對于推進(jìn)我們的 SOA 應(yīng)用起到了重要作用。”雷諾的反饋有助于指導(dǎo) MathWorks 對 ROS Toolbox 的更新,這將使其他客戶受益。MathWorks 機(jī)器人產(chǎn)品經(jīng)理 YJ Lim 表示,這一點(diǎn)尤為重要,因?yàn)樵絹碓蕉嗟钠嚬鹃_始使用 ROS 2 進(jìn)行 ADAS 開發(fā)。
具有發(fā)布者、訂閱者和服務(wù)的 SOA 系統(tǒng),用于使用 ROS 2 測試 ADAS 系統(tǒng)。(圖片所有權(quán):雷諾)Lim 說道:“這不僅僅是雷諾的問題。這確實(shí)會幫助其他汽車團(tuán)隊(duì)。
使用 ROS Toolbox 簡化開發(fā)
Simulink 與 ROS Toolbox 結(jié)合使用的一個核心優(yōu)勢是開發(fā)人員可以專注于他們的算法,而不必處理集成細(xì)節(jié)或 ROS 框架的細(xì)節(jié)。通過雷諾集成團(tuán)隊(duì)使用 MATLAB 和 Simulink 設(shè)置的持續(xù)集成工作流程,包含其設(shè)計(jì)的 Simulink 模型會自動轉(zhuǎn)換為不同目標(biāo)的可部署代碼。雷諾的尖端汽車軟件考慮到所涉及的規(guī)模和復(fù)雜性,經(jīng)常突破模擬的極限,一些模型每 10 毫秒更新一次超過 300,000 個 Simulink 信號。當(dāng)遇到工具限制或性能瓶頸時,與 MathWorks 產(chǎn)品工程師建立直接的工作關(guān)系的能力對于找到解決方案至關(guān)重要。Bedouet 表示:“我們確實(shí)正在開發(fā)一款大型應(yīng)用程序。如果它對我們有用,那么它應(yīng)該對世界上幾乎所有人都有效。”集成的 Simulink-ROS 解決方案還將使雷諾實(shí)現(xiàn)更高的汽車安全完整性等級 (ASIL),這是針對汽車功能安全的嚴(yán)格安全認(rèn)證。Bedouet 設(shè)想未來與 MathWorks 合作滿足這一需求以及其他不斷發(fā)展的行業(yè)需求,包括 ASIL 認(rèn)證。Bedouet 表示:“獲得 ASIL 等安全認(rèn)證將會非常棒,如果沒有經(jīng)過認(rèn)證的中間件,我們就無法做到這一點(diǎn)。”通過率先將 SOA 原則與 ROS 框架以及使用Simulink 的基于模型的設(shè)計(jì)相結(jié)合,雷諾正在成為未來智能汽車模塊化、可更新、功能豐富且經(jīng)過安全認(rèn)證的汽車軟件系統(tǒng)的行業(yè)領(lǐng)導(dǎo)者。Bedouet 表示:“MathWorks 團(tuán)隊(duì)的支持對我們提前部署和測試下一代 ADAS 功能起到了重要作用。這種靈活性是我們成功為車輛引入新功能的基石。”
-
SOA
+關(guān)注
關(guān)注
1文章
325瀏覽量
29229 -
adas
+關(guān)注
關(guān)注
311文章
2330瀏覽量
211936 -
汽車
+關(guān)注
關(guān)注
15文章
4154瀏覽量
41096
原文標(biāo)題:雷諾 × Simulink | 使用 ROS 機(jī)器人技術(shù)和 SOA(面向服務(wù)架構(gòu))推進(jìn) ADAS 原型設(shè)計(jì)
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
米爾RK3576成功上車!ROS2 Humble生態(tài)系統(tǒng)體驗(yàn)
EtherCAT主站協(xié)議棧EC-Master在ROS(機(jī)器人操作系統(tǒng))中的應(yīng)用

探索RISC-V在機(jī)器人領(lǐng)域的潛力
高精度機(jī)器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運(yùn)動控制方案
RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
小蘿卜機(jī)器人的故事
驅(qū)動服務(wù)機(jī)器人創(chuàng)新的核心技術(shù)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論