") 魯棒性原理在控制系統(tǒng)中的應(yīng)用
魯棒性原理在控制系統(tǒng)中的應(yīng)用

在現(xiàn)代控制系統(tǒng)的設(shè)計(jì)和分析中,魯棒性是一個(gè)核心概念。魯棒性指的是系統(tǒng)在面對(duì)模型不確定性、外部干擾和參數(shù)變化時(shí),仍能保持性能的能力。魯棒性原理在控制系統(tǒng)中的應(yīng)用,旨在確保系統(tǒng)即使在不理想的條件下也能穩(wěn)定運(yùn)行,這對(duì)于保障工業(yè)自動(dòng)化、航空航天、汽車(chē)電子等領(lǐng)域的安全和效率至關(guān)重要。
一、魯棒性的定義和重要性
魯棒性(Robustness)一詞源于拉丁語(yǔ)“robustus”,意為強(qiáng)壯、堅(jiān)固。在控制系統(tǒng)中,魯棒性意味著系統(tǒng)能夠抵抗各種內(nèi)外因素的影響,包括但不限于:
- 模型不確定性 :實(shí)際系統(tǒng)與理論模型之間存在差異,魯棒性控制系統(tǒng)能夠適應(yīng)這種差異。
- 外部干擾 :系統(tǒng)在運(yùn)行過(guò)程中可能會(huì)受到外部環(huán)境的干擾,如風(fēng)、溫度變化等。
- 參數(shù)變化 :系統(tǒng)參數(shù)可能會(huì)隨時(shí)間變化,如老化、磨損等。
- 操作條件變化 :操作條件的變化,如負(fù)載變化、操作點(diǎn)變化等。
魯棒性控制系統(tǒng)的設(shè)計(jì)目標(biāo)是在這些不確定性和變化下,保持系統(tǒng)的穩(wěn)定性和性能。
二、魯棒性原理的應(yīng)用領(lǐng)域
魯棒性原理在多個(gè)領(lǐng)域都有廣泛的應(yīng)用,包括:
- 工業(yè)自動(dòng)化 :在自動(dòng)化生產(chǎn)線中,魯棒性控制系統(tǒng)能夠確保產(chǎn)品質(zhì)量和生產(chǎn)效率,即使在原料質(zhì)量波動(dòng)或設(shè)備磨損的情況下。
- 航空航天 :在航空航天領(lǐng)域,魯棒性控制系統(tǒng)對(duì)于確保飛行器在極端環(huán)境和未知干擾下的安全性至關(guān)重要。
- 汽車(chē)電子 :在汽車(chē)行業(yè),魯棒性控制系統(tǒng)用于提高駕駛安全和舒適性,如自適應(yīng)巡航控制和電子穩(wěn)定程序。
- 電力系統(tǒng) :在電力系統(tǒng)中,魯棒性控制系統(tǒng)有助于維持電網(wǎng)的穩(wěn)定,即使在負(fù)載波動(dòng)和設(shè)備故障的情況下。
三、魯棒性控制策略
實(shí)現(xiàn)魯棒性控制的策略多種多樣,以下是一些常見(jiàn)的方法:
- 模型預(yù)測(cè)控制(MPC) :通過(guò)預(yù)測(cè)未來(lái)的系統(tǒng)行為,并優(yōu)化控制輸入以實(shí)現(xiàn)期望的性能。
- 自適應(yīng)控制 :系統(tǒng)能夠根據(jù)實(shí)時(shí)數(shù)據(jù)調(diào)整其控制策略,以適應(yīng)系統(tǒng)參數(shù)的變化。
- 滑模控制 :通過(guò)設(shè)計(jì)一個(gè)滑動(dòng)面,使系統(tǒng)狀態(tài)在該面上滑動(dòng),從而實(shí)現(xiàn)對(duì)不確定性和干擾的魯棒性。
- H∞控制 :通過(guò)最小化最壞情況下的干擾影響,設(shè)計(jì)出對(duì)干擾具有魯棒性的控制器。
- 模糊控制 :利用模糊邏輯處理不確定性和非線性,提高系統(tǒng)的魯棒性。
四、魯棒性設(shè)計(jì)的關(guān)鍵技術(shù)
- 不確定性建模 :準(zhǔn)確建模系統(tǒng)不確定性是設(shè)計(jì)魯棒性控制系統(tǒng)的第一步。
- 穩(wěn)定性分析 :使用各種數(shù)學(xué)工具,如李雅普諾夫理論,來(lái)分析系統(tǒng)的穩(wěn)定性。
- 性能指標(biāo) :定義和量化性能指標(biāo),如超調(diào)、上升時(shí)間和穩(wěn)態(tài)誤差,以評(píng)估控制系統(tǒng)的魯棒性。
- 仿真和實(shí)驗(yàn) :通過(guò)仿真和實(shí)驗(yàn)驗(yàn)證控制系統(tǒng)在各種條件下的性能。
五、魯棒性控制系統(tǒng)的挑戰(zhàn)
盡管魯棒性控制系統(tǒng)在理論和實(shí)踐上都取得了顯著進(jìn)展,但仍面臨一些挑戰(zhàn):
- 計(jì)算復(fù)雜性 :魯棒性控制器的設(shè)計(jì)和實(shí)現(xiàn)可能涉及復(fù)雜的計(jì)算,尤其是在多變量和非線性系統(tǒng)中。
- 實(shí)時(shí)性 :在實(shí)時(shí)系統(tǒng)中,魯棒性控制器需要快速響應(yīng),這可能對(duì)硬件和軟件提出了更高的要求。
- 權(quán)衡 :在提高魯棒性的同時(shí),可能會(huì)犧牲一些性能指標(biāo),如響應(yīng)速度或能耗。
六、未來(lái)發(fā)展趨勢(shì)
隨著計(jì)算技術(shù)的發(fā)展和新材料的應(yīng)用,魯棒性控制系統(tǒng)的未來(lái)發(fā)展趨勢(shì)包括:
- 智能化 :通過(guò)集成人工智能技術(shù),提高控制系統(tǒng)的自適應(yīng)能力和決策能力。
- 集成化 :將多個(gè)控制策略集成到一個(gè)統(tǒng)一的框架中,以實(shí)現(xiàn)更全面的魯棒性。
- 網(wǎng)絡(luò)化 :在網(wǎng)絡(luò)化控制系統(tǒng)中,考慮通信延遲和數(shù)據(jù)丟失對(duì)魯棒性的影響。
- 綠色控制 :在設(shè)計(jì)魯棒性控制系統(tǒng)時(shí),考慮能效和環(huán)境影響。
七、結(jié)論
魯棒性原理在控制系統(tǒng)中的應(yīng)用是確保系統(tǒng)在各種不確定條件下穩(wěn)定運(yùn)行的關(guān)鍵。隨著技術(shù)的進(jìn)步,魯棒性控制系統(tǒng)的設(shè)計(jì)和實(shí)現(xiàn)將更加智能化、集成化和網(wǎng)絡(luò)化,以滿足日益增長(zhǎng)的性能和安全需求。
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6955瀏覽量
114094 -
模型
+關(guān)注
關(guān)注
1文章
3752瀏覽量
52106 -
工業(yè)自動(dòng)化
+關(guān)注
關(guān)注
17文章
3127瀏覽量
69884 -
魯棒性
+關(guān)注
關(guān)注
2文章
48瀏覽量
13161
發(fā)布評(píng)論請(qǐng)先 登錄
瞻芯電子G2 650V SiC MOSFET的魯棒性驗(yàn)證試驗(yàn)
永磁同步直線電機(jī)的粒子群PID空間矢量控制
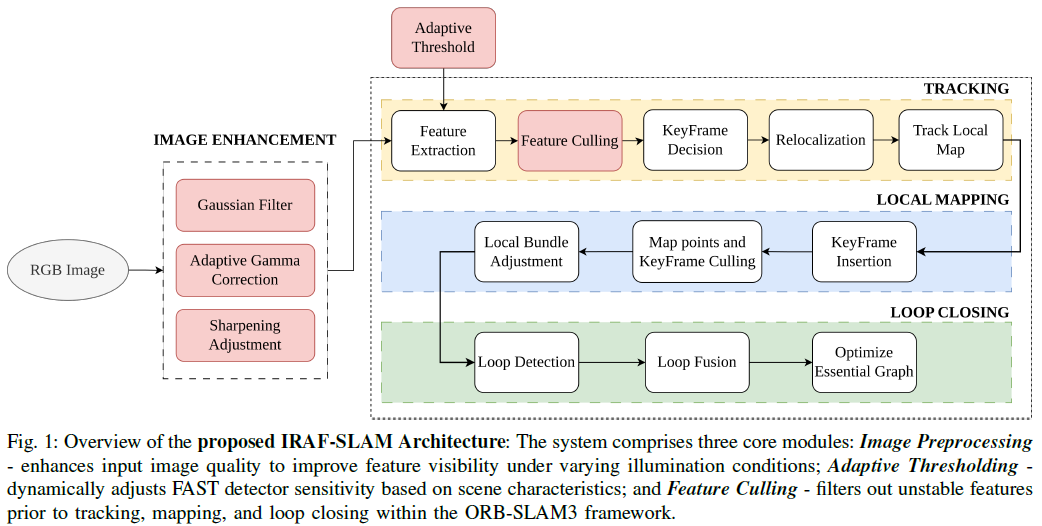
具備光照魯棒和自適應(yīng)特征剔除的VSLAM前端框架



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論