") agv叉車激光導(dǎo)航和二維碼導(dǎo)航有什么區(qū)別?適用什么場(chǎng)景?選哪種比較好?
agv叉車激光導(dǎo)航和二維碼導(dǎo)航有什么區(qū)別?適用什么場(chǎng)景?選哪種比較好?

無(wú)人叉車激光導(dǎo)航和二維碼導(dǎo)航在多個(gè)方面存在顯著差異,以下是它們的主要區(qū)別:
一、原理不同
激光導(dǎo)航:利用激光雷達(dá)掃描地面環(huán)境,實(shí)時(shí)獲取機(jī)器人當(dāng)前位置和周圍環(huán)境信息,然后根據(jù)事先建立的地圖進(jìn)行自主導(dǎo)航。激光雷達(dá)通過(guò)發(fā)射激光束,并利用光束的反射時(shí)間和角度來(lái)計(jì)算物體的距離和位置,從而生成環(huán)境地圖,并發(fā)送給控制系統(tǒng)進(jìn)行處理。
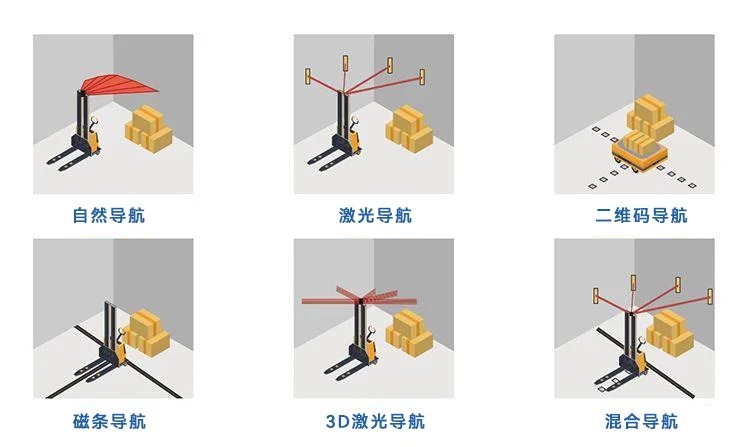
二維碼導(dǎo)航:在地面布置二維碼標(biāo)記,機(jī)器人通過(guò)識(shí)別二維碼標(biāo)記進(jìn)行定位和導(dǎo)航。機(jī)器人通過(guò)掃描這些二維碼標(biāo)簽,可以明確自己在特定區(qū)域內(nèi)的具體位置,從而更加準(zhǔn)確地執(zhí)行搬運(yùn)任務(wù)。
二、使用場(chǎng)景不同
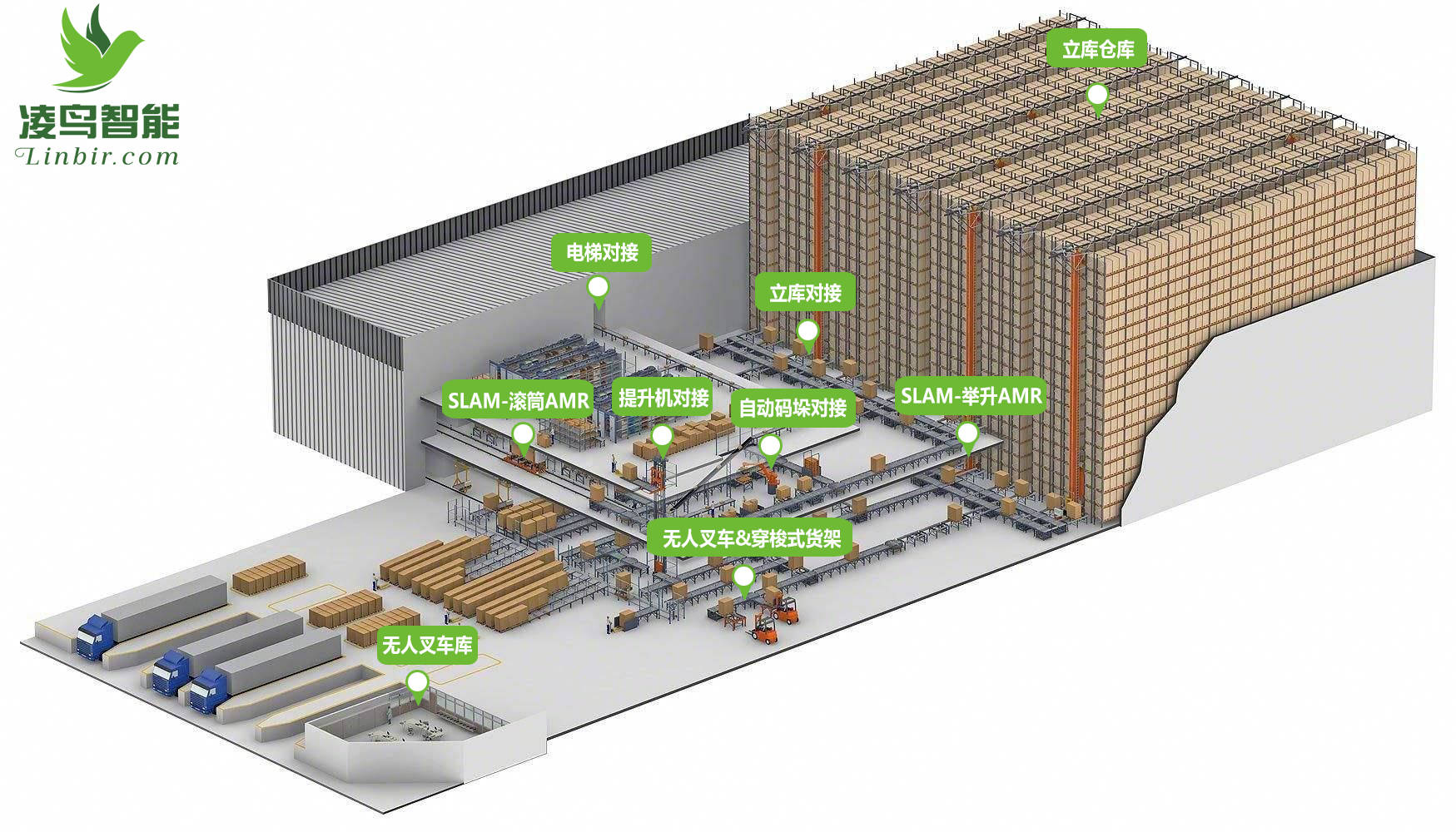
激光導(dǎo)航:適用于大型的、固定的場(chǎng)所,如倉(cāng)庫(kù)、物流中心等。這些場(chǎng)所通常面積較大,布局復(fù)雜,需要高精度的導(dǎo)航和定位能力。
二維碼導(dǎo)航:適用于小型的、靈活的場(chǎng)所,如超市、商場(chǎng)等。這些場(chǎng)所通常面積較小,布局相對(duì)簡(jiǎn)單,且需要更經(jīng)濟(jì)的導(dǎo)航解決方案。
三、精度和穩(wěn)定性不同
激光導(dǎo)航:定位精度和穩(wěn)定性較高,可以達(dá)到毫米級(jí)別。由于激光導(dǎo)航能夠?qū)崟r(shí)感知周圍環(huán)境并生成地圖,因此能夠更準(zhǔn)確地規(guī)劃路徑和避障。
二維碼導(dǎo)航:定位精度和穩(wěn)定性相對(duì)較低。雖然二維碼標(biāo)簽可以提供一定的定位信息,但受限于標(biāo)簽的布置密度和識(shí)別精度,其整體導(dǎo)航精度和穩(wěn)定性不如激光導(dǎo)航。
四、技術(shù)難度和成本不同
激光導(dǎo)航:技術(shù)難度和成本相對(duì)較高。激光導(dǎo)航需要專業(yè)的設(shè)備和技術(shù)支持,包括激光雷達(dá)、傳感器、計(jì)算機(jī)控制系統(tǒng)等。同時(shí),由于需要事先建立地圖并進(jìn)行路徑規(guī)劃,因此還需要專業(yè)的技術(shù)人員進(jìn)行調(diào)試和維護(hù)。
二維碼導(dǎo)航:技術(shù)相對(duì)簡(jiǎn)單,成本也相對(duì)較低。二維碼導(dǎo)航主要依賴于地面布置的二維碼標(biāo)簽和機(jī)器人上的攝像頭或傳感器進(jìn)行識(shí)別。因此,其設(shè)備成本和維護(hù)成本都相對(duì)較低。
審核編輯 黃宇
-
AGV
+關(guān)注
關(guān)注
28文章
1554瀏覽量
43682 -
激光導(dǎo)航
+關(guān)注
關(guān)注
0文章
49瀏覽量
5970
發(fā)布評(píng)論請(qǐng)先 登錄
有哪些常見(jiàn)的二維碼模組類型?

UV紫外激光打標(biāo)機(jī)-視覺(jué)定位電子元件二維碼打標(biāo)機(jī)

二維影像掃描引擎在門禁二維碼刷卡梯控行業(yè)中的應(yīng)用

掃條碼或者二維碼用什么掃碼模塊?

二維碼掃描識(shí)別器有內(nèi)嵌款嗎?掃碼識(shí)別的功能是嵌入在自助機(jī)上的

二維碼掃碼模塊是什么?它和普通條碼識(shí)別設(shè)備有什么不同
AGV視覺(jué)導(dǎo)航:智能物流的“智慧之眼”
AGV無(wú)人叉車的功能包括什么?企業(yè)采購(gòu)前必須了解的因素

哪款二維碼模組適合嵌入戶外取餐柜,用于掃二維碼

深度解析:為什么支付場(chǎng)景都在用這款二維碼掃碼模組?

基于STM32的二維碼識(shí)別源碼+二維碼解碼庫(kù)lib
聯(lián)核各類導(dǎo)航方式無(wú)人叉車適用場(chǎng)景大揭秘 看看你的工廠是否符合?

二維碼讀取器是干嘛的

一“碼”當(dāng)先!看二維碼模組如何重塑智能門鎖掃碼體驗(yàn)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論