") 使用激光跟蹤儀提升碼垛機器人精度
使用激光跟蹤儀提升碼垛機器人精度

1.背景
碼垛機器人是一種用于工業(yè)自動化的機器人,專門設(shè)計用來將物品按照一定的順序和結(jié)構(gòu)堆疊起來,通常用于倉庫、物流中心和生產(chǎn)線上,它們可以自動執(zhí)行重復(fù)的、高強度的搬運和堆垛任務(wù)。
 圖1 碼垛機器人
圖1 碼垛機器人傳統(tǒng)調(diào)整碼垛機器人的方法,通常在組裝后先按機械刻度粗調(diào)每個關(guān)節(jié)零位,然后機器人分別沿X/Y方向,走固定長度的距離,用尺子或其它工具測量實際距離,計算偏差,根據(jù)偏差再進行微調(diào)零位,但這種調(diào)整方式有很大的局限性,對機器人的絕對定位精度提升有限,無法滿足工業(yè)發(fā)展需要。
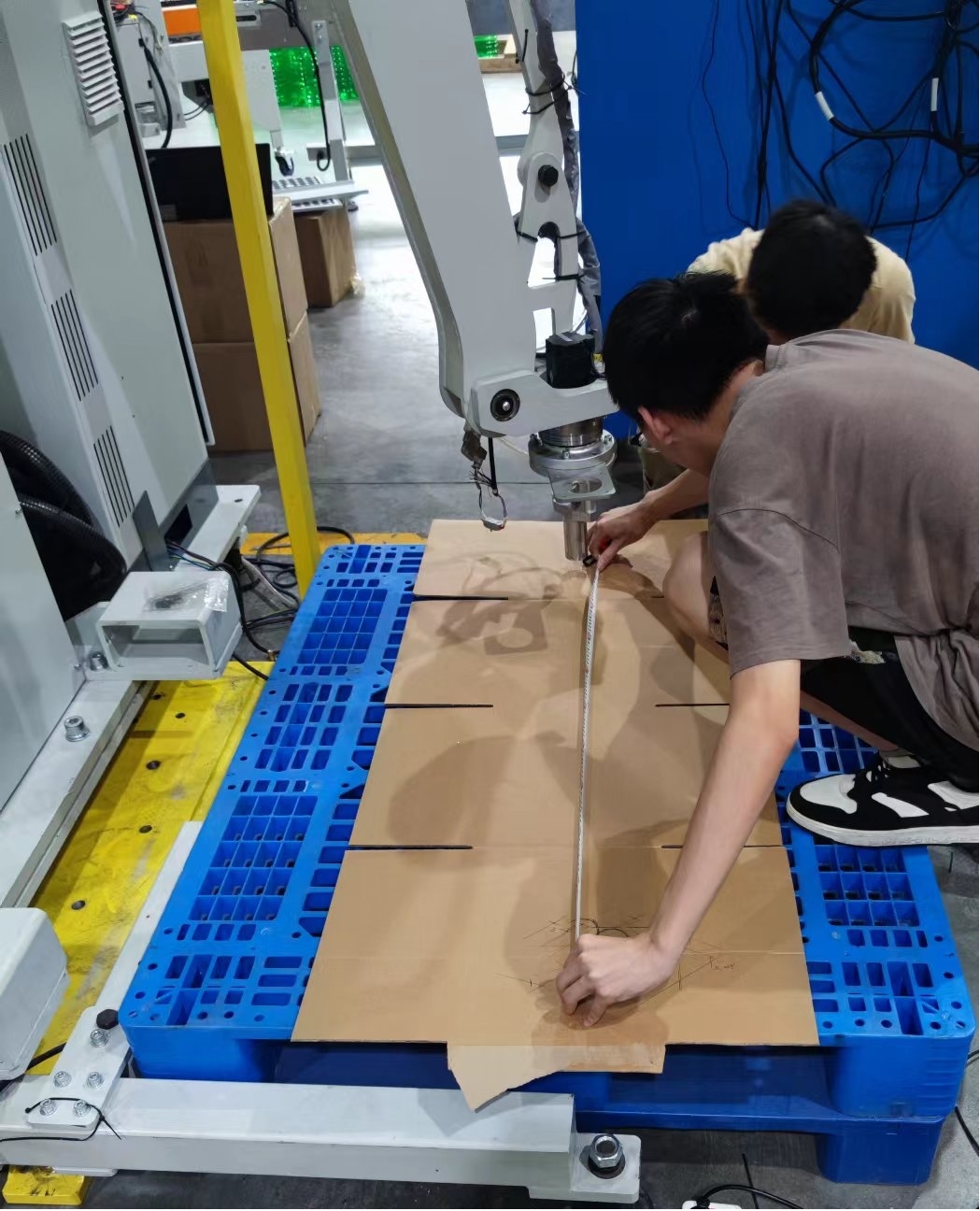 圖2 傳統(tǒng)方式測量機器人X向運動偏差
圖2 傳統(tǒng)方式測量機器人X向運動偏差2.解決方案
針對工業(yè)機器人行業(yè)提升絕對精度的需求,深入行業(yè)調(diào)研實測,RobotMaster軟件系統(tǒng)專門應(yīng)對工業(yè)機器人校準及性能需求,搭配GTS系列激光跟蹤儀, 搭建成一套完備的工業(yè)機器人校準及檢測方案。
其中GTS激光跟蹤儀搭配iTracker六維姿態(tài)傳感器(圖3),可實現(xiàn)對目標位置和姿態(tài)的動態(tài)跟蹤及高精度測量,可同時實現(xiàn)對工業(yè)機器人位置精度和姿態(tài)精度的監(jiān)控和測量,完美契合工業(yè)機器人性能指標的測量需求。
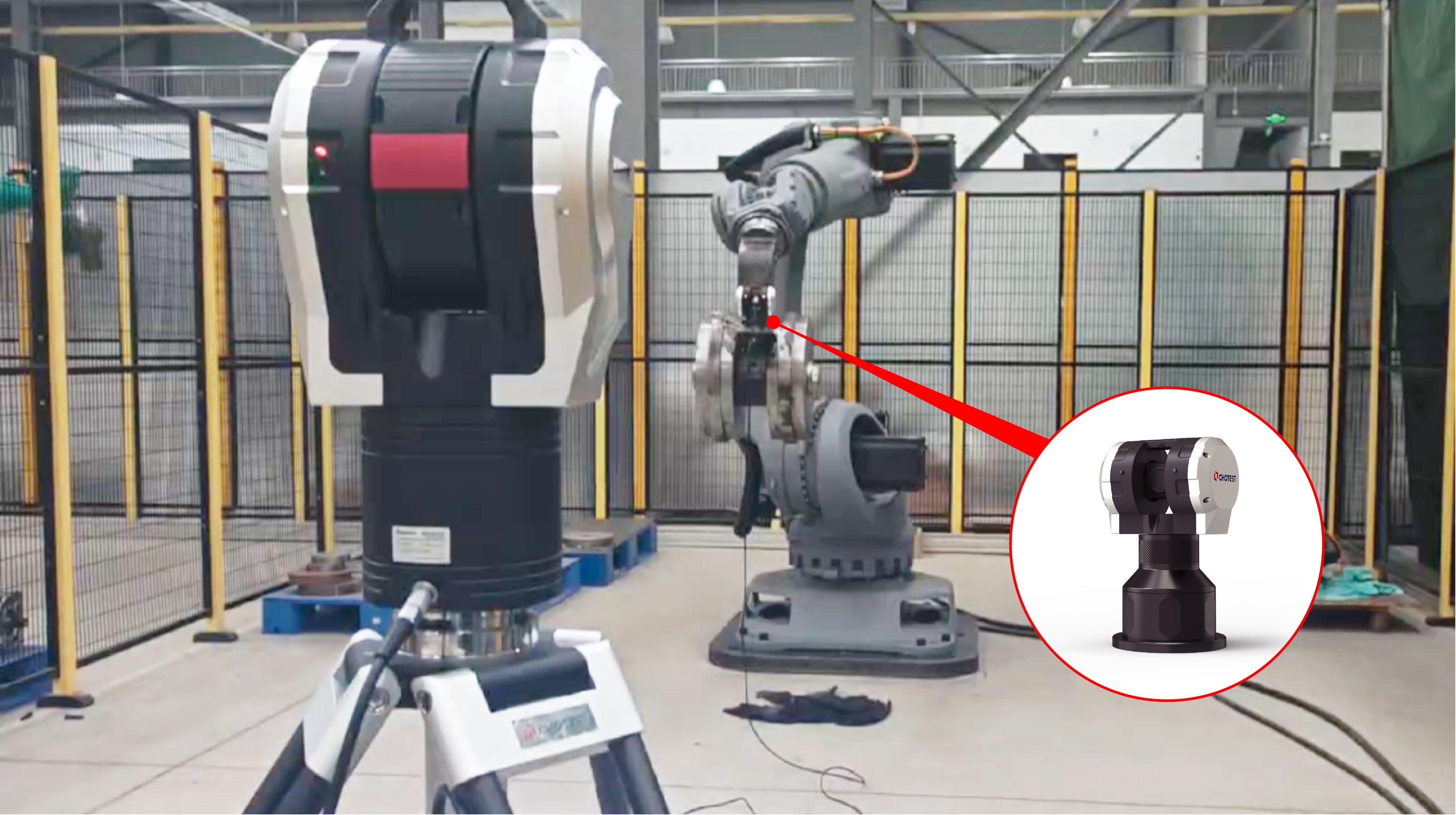 圖3 使用六維姿態(tài)傳感器測量機器人
圖3 使用六維姿態(tài)傳感器測量機器人激光跟蹤儀校準機器人的原理:通過GTS激光跟蹤儀,可以精確測量機器人末端在一系列預(yù)定義關(guān)節(jié)角度下的實際位姿,RobotMaster軟件將測量數(shù)據(jù)與內(nèi)部通過DH模型轉(zhuǎn)換得到的理論值進行計算。根據(jù)計算所得偏差,通過軟件的算法調(diào)整DH模型,使得理論位置與測量位置之間的差異最小化,將修正后的參數(shù)補償進機器人,從而提高其精度。
3.校準流程
3.1 模型創(chuàng)建
在RobotMaster軟件中選擇碼垛機器人,建立機器人的理論DH模型(圖4),如果沒有DH模型,也可用常規(guī)模式創(chuàng)建桿長模型。
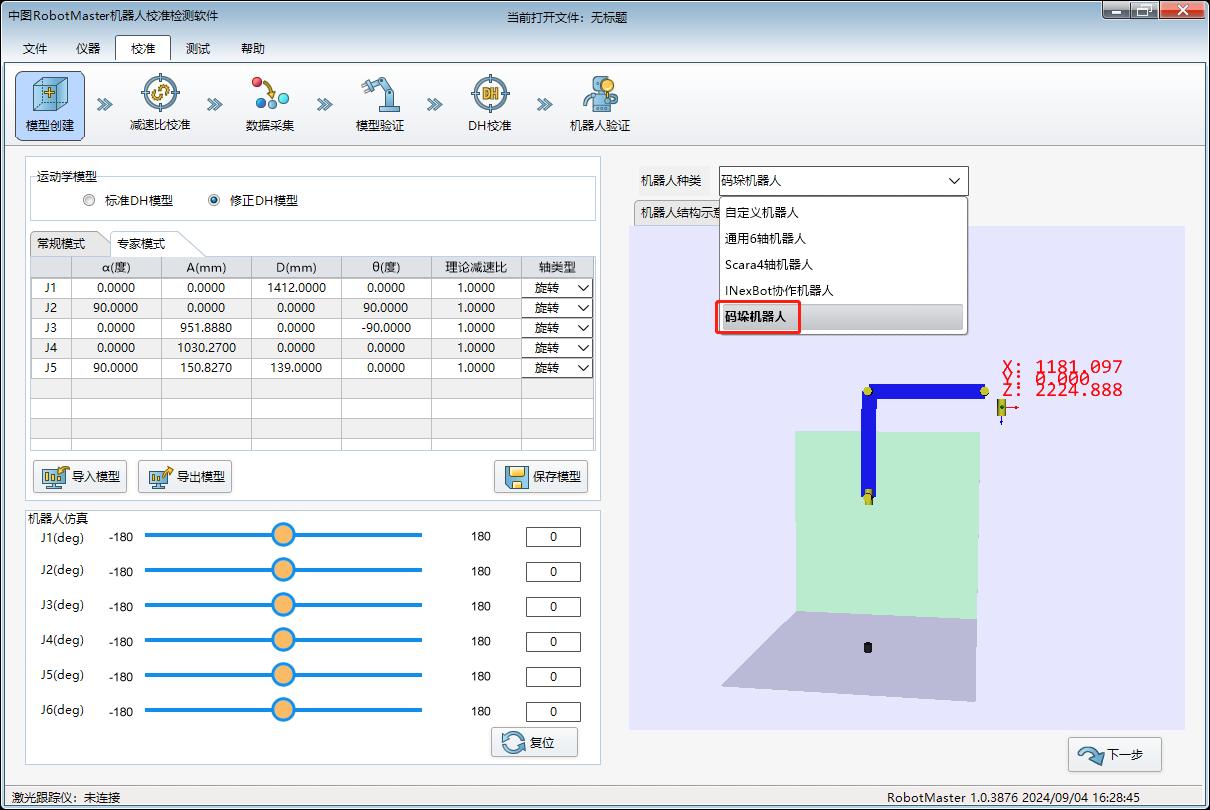 圖4 碼垛機器人DH模型
圖4 碼垛機器人DH模型3.2 數(shù)據(jù)采集
(1)通過跟蹤儀采集碼垛機器人不同位置的50個點位。
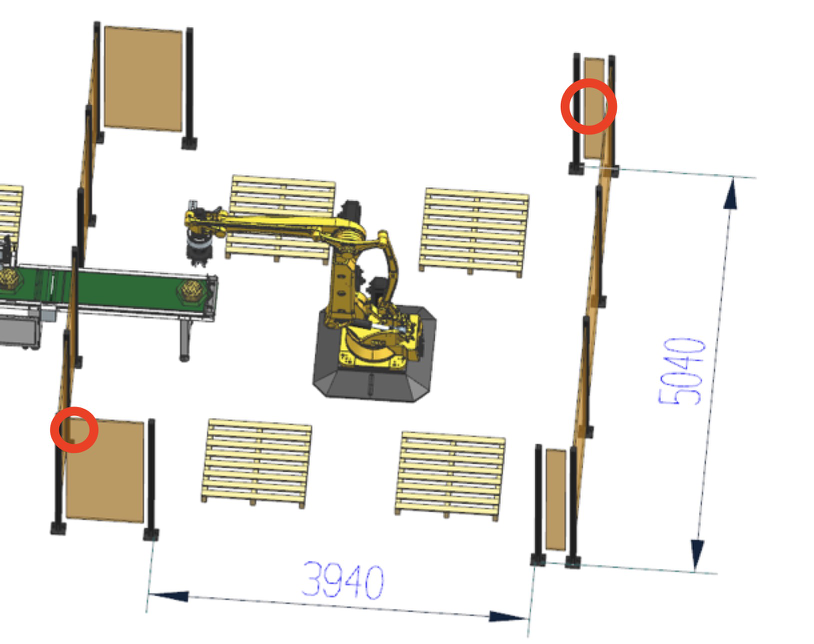
 圖5 跟蹤儀測量進行數(shù)據(jù)采集
圖5 跟蹤儀測量進行數(shù)據(jù)采集(2)數(shù)據(jù)采集完畢后,進入模型驗證步驟,軟件將測量數(shù)據(jù)與理論值進行計算得到各點位偏差。根據(jù)偏差大小可以輔助判斷使用的DH模型是否正確,也可以根據(jù)實際測量情況,選擇去掉個別異常點進行分析校準,如圖6,去掉異常點P6后,驗證偏差整體下降。
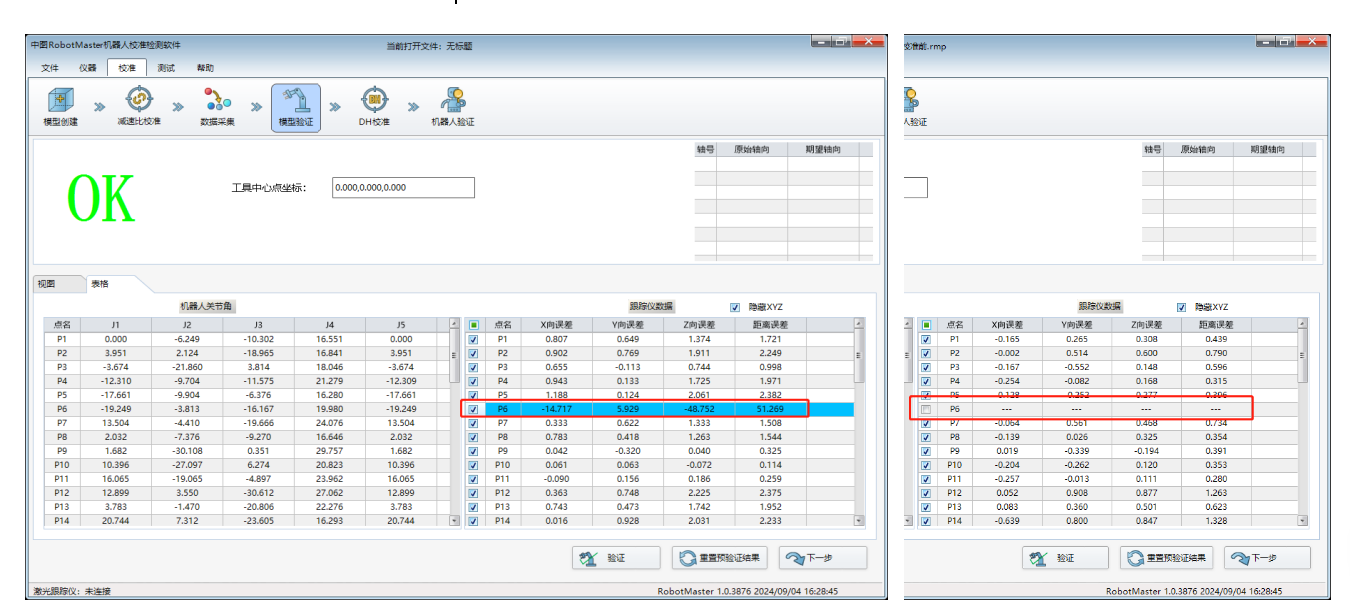 圖6 整體計算P6點異常大(左)和去掉P6計算結(jié)果正常(右)
圖6 整體計算P6點異常大(左)和去掉P6計算結(jié)果正常(右)3.3 模型校準
根據(jù)需要進行校準項勾選進行校準計算,得到校準后的DH模型(圖7左),將補償值修正到機器人控制器,完成對機器人參數(shù)的補償,可以看到校準后的最大位置精度提升到到0.5mm左右(7右)。
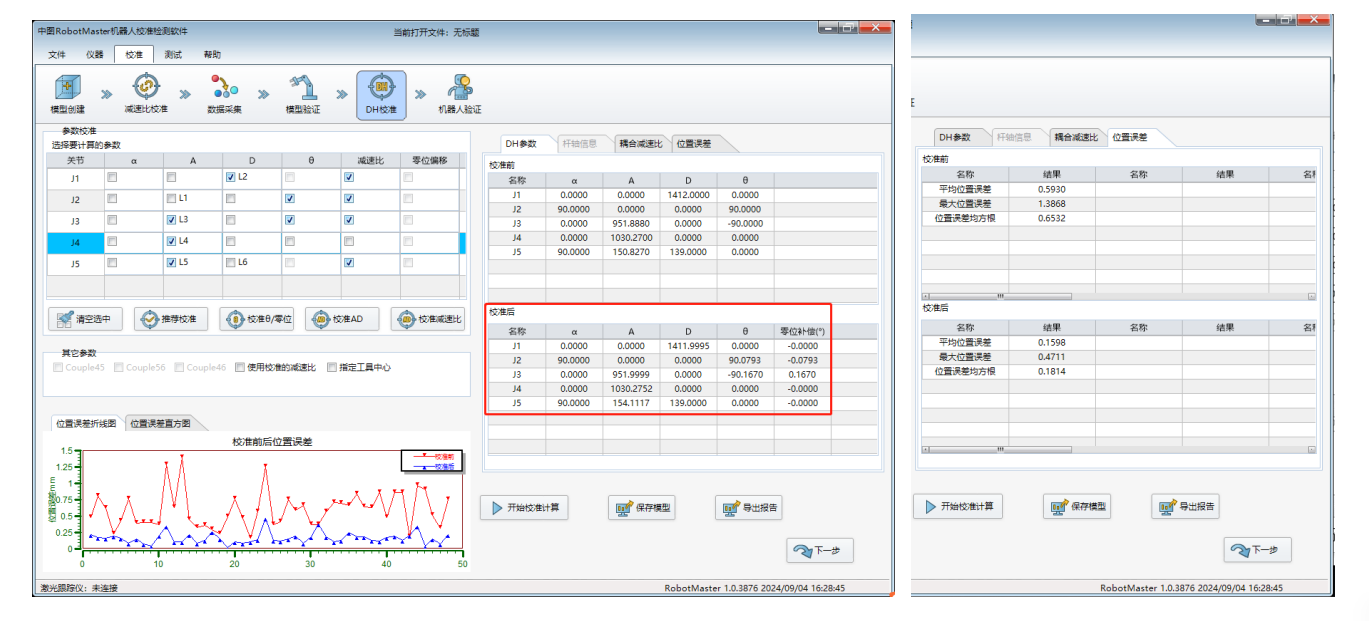 圖7 DH模型校準(左)和去掉P6計算結(jié)果正常(右)
圖7 DH模型校準(左)和去掉P6計算結(jié)果正常(右)3.4 校準驗證
切換性能檢測模塊,該模塊依據(jù)GB/T 12642即ISO 9283標準要求,幫助用戶完成對工業(yè)機器人各項性能指標的測試。
創(chuàng)建立方體,進行S1-位姿準確度和重復(fù)性項測試,從圖7可以看出,校準后的碼垛機器人位置準確度最大在0.5mm左右,與校準結(jié)果相符。
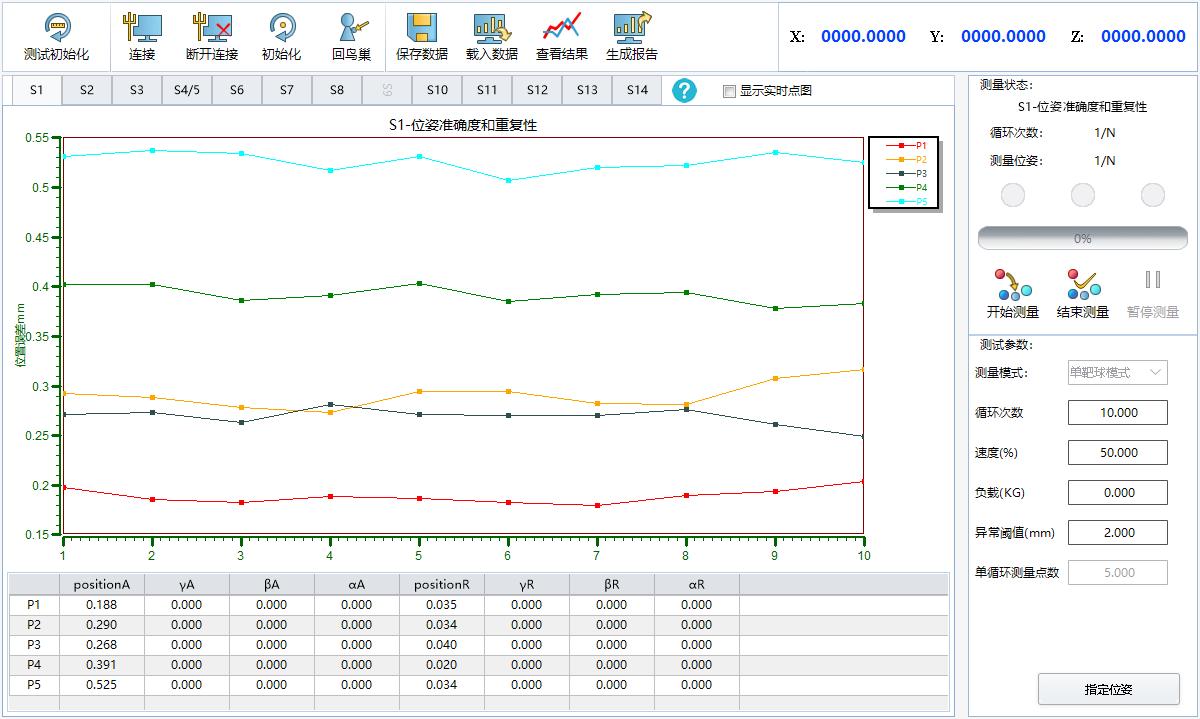 圖8 位置準確度與重復(fù)性
圖8 位置準確度與重復(fù)性4.結(jié)論
工業(yè)機器人校準及性能檢測系統(tǒng),借助RobotMaster軟件強大的機器人校準和檢測功能,配合GTS激光跟蹤儀頂尖的跟蹤測量性能,強強組合,已經(jīng)在工業(yè)機器人領(lǐng)域取得了客戶充分認可和肯定,未來將用更快的響應(yīng)和更好的服務(wù)支持,滿足機器人行業(yè)的不同需求,與客戶共同提高,確保機器人的性能時刻處于理想狀態(tài)。
-
機器人
+關(guān)注
關(guān)注
213文章
31092瀏覽量
222350 -
工業(yè)自動化
+關(guān)注
關(guān)注
17文章
3127瀏覽量
69908 -
激光跟蹤儀
+關(guān)注
關(guān)注
0文章
86瀏覽量
9216
發(fā)布評論請先 登錄
機器人拆碼垛中高精度放置與垛型構(gòu)建的解析分析:技術(shù)路徑與核心要素
高精度機器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運動控制方案
碼垛機器人遠程監(jiān)控運維管理系統(tǒng)方案

M16圓形連接器為碼垛機器人實現(xiàn)高效穩(wěn)定的運行
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
RFID技術(shù)與碼垛機器人深度協(xié)同的核心難題與破局之道
碼垛機器人遠程運維云平臺解決方案

三坐標和激光跟蹤儀的不同之處

激光干涉儀:解鎖協(xié)作機器人DD馬達的精度密碼

AS-33C激光雷達,為碼垛機器人打造無懈可擊的安全屏障
詳細介紹機場智能指路機器人的工作原理
激光跟蹤儀:三大工業(yè)領(lǐng)域的“精準之眼”,高效賦能智能制造

復(fù)合機器人抓取精度的影響因素及提升策略
激光跟蹤儀測量精度藏著大秘密,您了解多少?

德州儀器先進的電流和電壓檢測技術(shù)助力更精確電機控制 提升機器人精度



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論