 基于DOE的管道爬行機器人輕量化研究
基于DOE的管道爬行機器人輕量化研究

隨著科技的不斷發展,管道爬行機器人在各種工業領域中的應用越來越廣泛,尤其在管道檢測和維護方面發揮著不可替代的作用。然而,傳統的管道爬行機器人往往存在質量較大、操作不便等問題,影響了其在實際應用中的效率和可靠性。因此,基于DOE的管道爬行機器人輕量化研究成為了當前研究的熱點之一。
首先,我們需要明確什么是DOE。DOE,即設計優化實驗,是一種基于統計學原理的優化設計方法。通過DOE,我們可以在產品設計階段對各個參數進行優化,以達到產品性能的最優化。在管道爬行機器人的輕量化研究中,DOE可以幫助我們找到影響機器人質量的關鍵因素,并對其進行優化,從而達到減輕機器人質量的目的。
在管道爬行機器人的機械結構設計中,我們采用了三組獨立驅動模塊呈120度環形分布在車身周圍的設計方案。這種設計可以使機器人在管道內壁豎直爬升的過程中更加穩定,同時也可以使機器人適應不同管徑的管道。然而,這種設計也帶來了一定的問題,即機器人的質量較大。因此,我們需要對機器人的機械結構進行優化,以減輕其質量。
在優化過程中,我們采用了有限元分析和拓撲優化等方法。首先,我們通過有限元分析對機器人的各個部件進行了受力分析,找出了受力較大的部件和區域。然后,我們針對這些部件和區域進行了拓撲優化,通過改變其形狀和尺寸來減輕其質量。同時,我們還對機器人的材料進行了優化選擇,采用了輕質高強度材料來替代傳統的重質材料,進一步減輕了機器人的質量。
除了機械結構的優化外,我們還對機器人的控制系統進行了優化。通過采用先進的控制算法和傳感器技術,我們可以實現對機器人的精確控制,提高了其運動的穩定性和精度。同時,我們還采用了節能技術,優化了機器人的能耗,使其在長時間工作時能夠保持穩定的性能。
末了,經過一系列的優化設計和實驗驗證,我們成功研制出了一款基于DOE的輕量化管道爬行機器人。該機器人不僅具有優異的運動性能和穩定性,而且質量大大減輕,操作更加便捷。在實際應用中,該機器人可以廣泛應用于各種管道的檢測和維護工作中,提高了工作效率和安全性。
總之,基于DOE的管道爬行機器人輕量化研究是一項具有重要意義的研究工作。通過優化設計和實驗驗證,我們可以研制出更加優秀的管道爬行機器人,為工業領域的發展做出更大的貢獻。同時,該研究也為其他類似產品的輕量化設計提供了有益的參考和借鑒。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
31079瀏覽量
222266 -
DOE
+關注
關注
0文章
41瀏覽量
13598
發布評論請先 登錄
小型自重構機器人能不能幫忙做一個?
大象機器人2025年度大事記回顧
電子谷機器人線束|人形機器人“神經脈絡”,穩定護航產業化

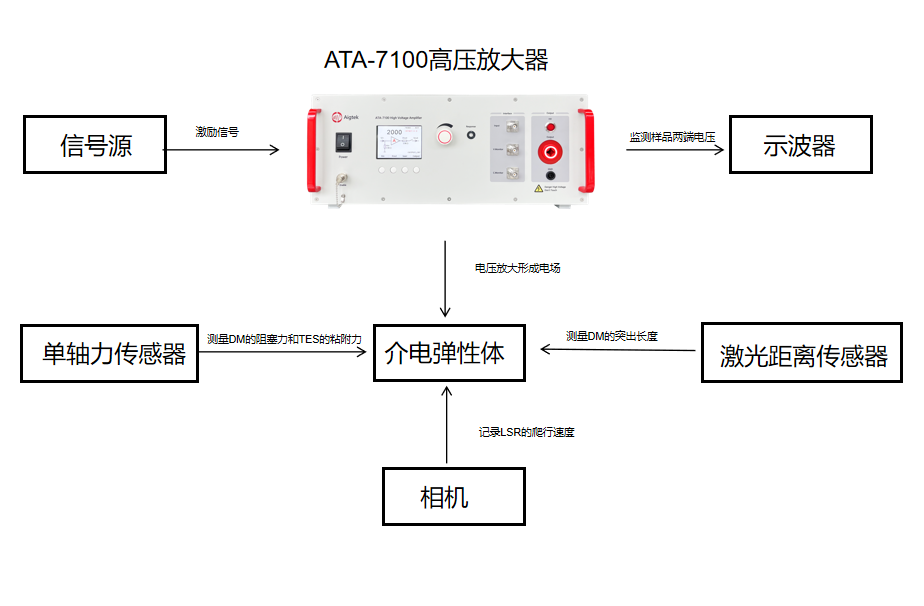
高壓放大器在介電彈性體制成的軟機器人研究中的應用
小蘿卜機器人的故事
介電彈性體軟機器人研究:高壓放大器的應用實踐

我國發布全球首款輕量化重載機器人仿生靈巧手

工業機器人的特點
華沿機器人:以協作機器人技術賦能汽車智能制造新時代

輪式移動機器人電機驅動系統的研究與開發
盤點#機器人開發平臺
樹莓派“復活”我的世界爬行者,現實版“噩夢”機器人誕生!

【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
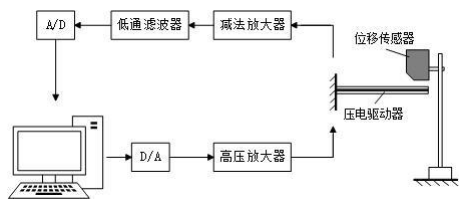
高壓放大器基于壓電驅動的爬行機器人的研究實驗



 工商網監
工商網監
評論