 大象機器人開源六軸協作機械臂myCobot 320 手機攝影技術!
大象機器人開源六軸協作機械臂myCobot 320 手機攝影技術!

引言
有沒有遇到過這樣的情況:當你手持手機或相機準備拍攝視頻時,心中已經構想了完美的畫面,但卻因為實際的限制無法捕捉到理想中的角度?這種情況可能會讓人感到挫折。例如,如果想要從地面一只螞蟻的視角拍攝,鏡頭需要與螞蟻處于同一水平線上,這在操作上不僅困難,而且往往難以實現。
盡管目前市場上有許多穩定設備如平衡環架(gimbal)來輔助拍攝,以求達到穩定和多角度的拍攝效果,但在此篇文章中,我將探索一種獨特的解決方案:通過將手機安裝在機械臂的末端來進行拍攝,以實現那些傳統方法難以捕捉的特殊視角。此次嘗試不僅旨在克服拍攝過程中的物理限制,而且也期望通過技術的創新來開拓我們對攝影角度的想象和實踐。
設備
myCobot 320 M5stack
myCobot 320,一款具備六自由度的協作型機械臂,憑借其獨特的設計和高精度伺服電機成為了領域內的亮點。這款機械臂擁有最大350mm的工作半徑和最大1000g的末端負載能力,使其適用于廣泛的應用場景。myCobot 320不僅支持靈活的視覺開發應用,還提供了深入的機械運動原理解析,為用戶帶來了12個標準的24V工業IO接口,滿足不同的開發需求。

它的開放性極高,兼容大多數主流操作系統和編程語言,包括Python和ROS等,為開發者提供了極大的靈活性和自由度。無論是在教育、研發還是工業應用中,myCobot 320都能提供強大支持,使創新和應用開發更加便捷高效。
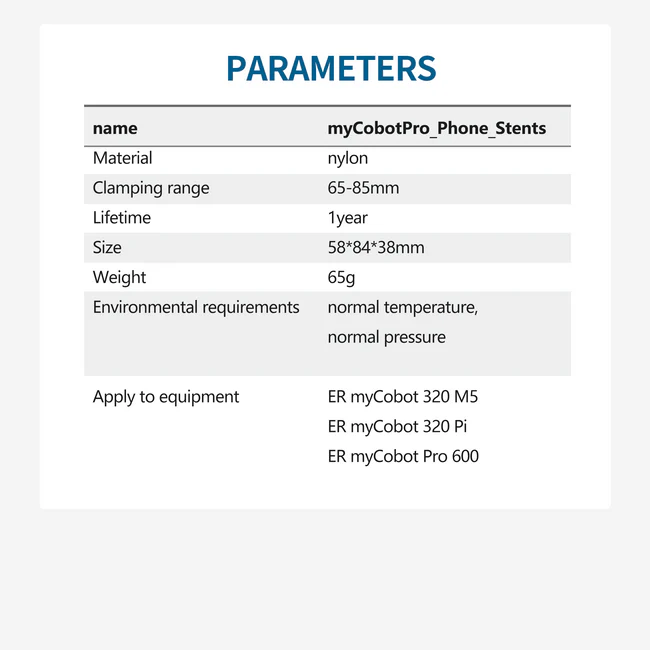
myCobot Pro phone holder
它可以安裝在myCobot 320,myCobot pro 630機械臂的末端,能夠穩定的固定住手機。

以上就是我們需要使用到的設備了。
初次嘗試
安裝手機支架
整體安裝的效果圖片

基礎控制測試
做一個簡單的嘗試。
拍攝視頻
給機械臂進行關節控制的編程,讓我們一起看看效果如何。
盡管視頻中展示的機械臂運動軌跡看似簡單,但實際上,調整這些軌跡點位仍需耗費大量時間,且效果未必理想。因此,我在考慮是否存在更優解決方案,例如,通過設定幾種運動模式和預先規劃機械臂的拍攝路徑。這不僅能夠有效利用機械臂輔助拍攝,同時也提供了一種更為高效的部署方式。
編程挑戰
開發需求分析
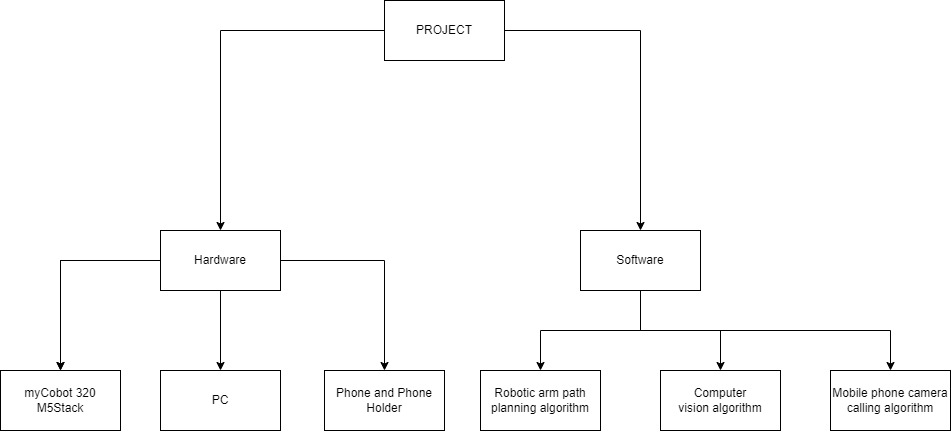
確定使用的設備如下
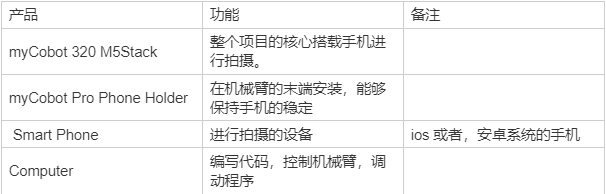
需求:需求優化:
目標是為靜態物體拍攝場景設計一系列創新的視頻拍攝方式,初步計劃采用三種方法:
1. 利用機械臂末端固定的手機,實現物體360°全景視頻拍攝。
2. 創建一種畫面效果,從遠處平緩推進至物體近前,模擬“拉近鏡頭”的效果。
3. 實現機械臂末端的快速旋轉與移動,捕捉動感十足的畫面。
為了精準控制拍攝過程,計劃利用OpenCV機器視覺算法和AVFoundation iOS框架,通過Python腳本控制機械臂的精確運動。我們將通過手機攝像頭識別物體的尺寸,進而計算出機械臂末端與物體之間的理想距離。根據這個距離,設計相應的機械臂運動算法,確保拍攝過程中能夠獲得最佳畫面效果。
YOLO視覺算法
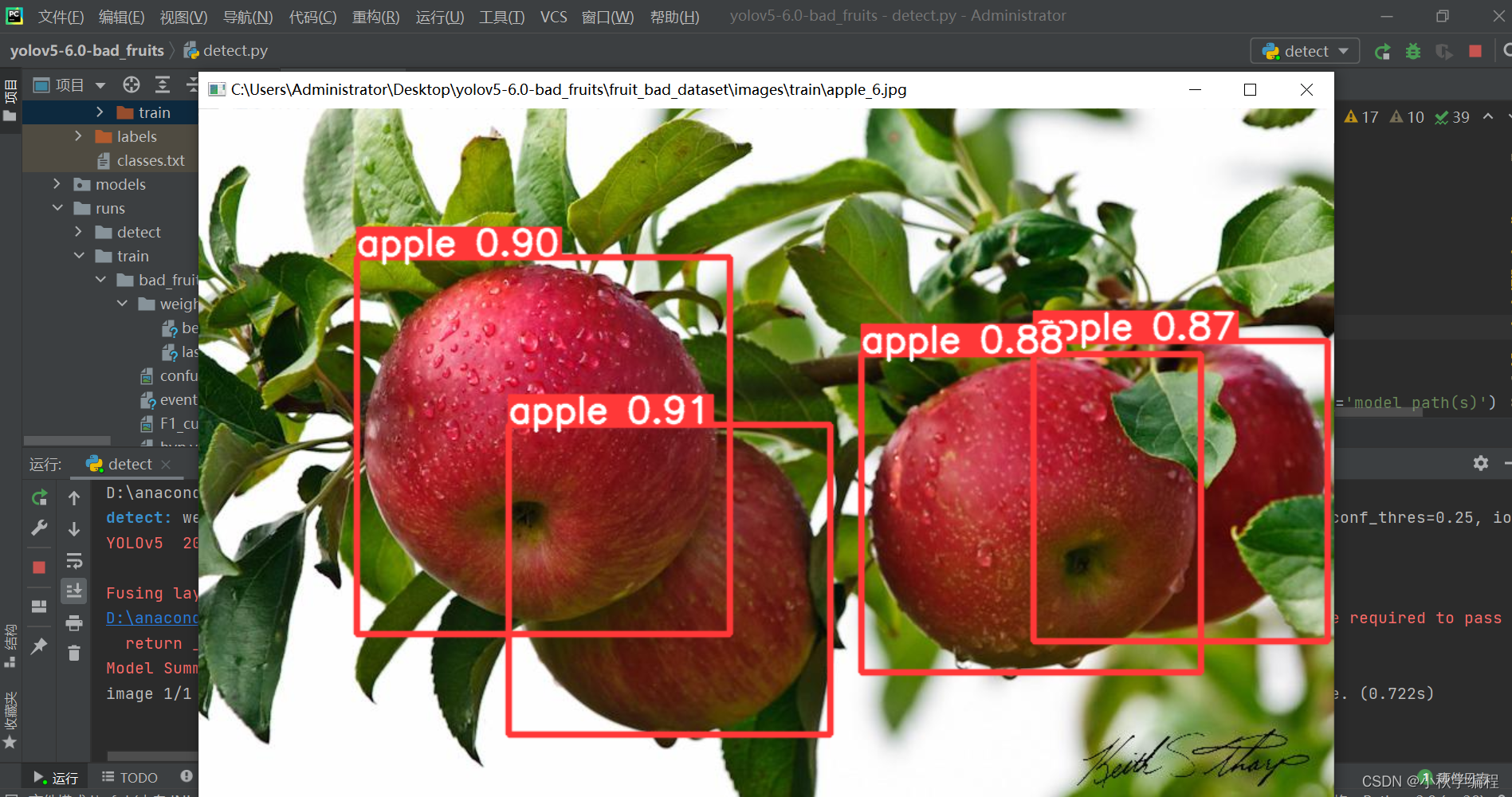
為了節省時間,我們將不會自行訓練機器視覺算法來識別特定物體。相反,我們直接采用其他開發者已經訓練優化的YOLOv5庫,以實現對目標物體的準確檢測。
import cv2 import torch from pathlib import Path from models.experimental import attempt_load from utils.general import non_max_suppression, scale_coords from utils.torch_utils import select_device, time_synchronized def detect_apples(img_path): device = select_device('') weights = 'yolov5s.pt' model = attempt_load(weights, map_location=device) img0 = cv2.imread(img_path) # BGR img = img0[:, :, ::-1] # RGB img = torch.from_numpy(img).to(device) img = img.float() # uint8 to fp16/32 img /= 255.0 # 0 - 255 to 0.0 - 1.0 if img.ndimension() == 3: img = img.unsqueeze(0) # Inference t1 = time_synchronized() pred = model(img)[0] # Apply NMS pred = non_max_suppression(pred, 0.4, 0.5, classes=None, agnostic=False) t2 = time_synchronized() print(f'Inference time: {(t2 - t1):.3f}s') # Process detections for i, det in enumerate(pred): # detections per image gn = torch.tensor(img0.shape)[[1, 0, 1, 0]] # normalization gain whwh if len(det): det[:, :4] = scale_coords(img.shape[2:], det[:, :4], img0.shape).round() for *xyxy, conf, cls in reversed(det): label = f'{model.names[int(cls)]} {conf:.2f}' plot_one_box(xyxy, img0, label=label, color=(255, 0, 0)) return img0 def plot_one_box(xyxy, img, color=None, label=None, line_thickness=None): # Plots one bounding box on image img tl = ( line_thickness or round(0.002 * max(img.shape[0:2])) + 1 ) # line/font thickness color = color or [random.randint(0, 255) for _ in range(3)] c1, c2 = (int(xyxy[0]), int(xyxy[1])), (int(xyxy[2]), int(xyxy[3])) cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA) if label: tf = max(tl - 1, 1) # font thickness t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0] c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3 cv2.rectangle( img, c1, c2, color, -1, cv2.LINE_AA ) # filled cv2.putText( img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA, ) return img if __name__ == '__main__': img_path = 'test_image.jpg' # 輸入你的圖像路徑 result_img = detect_apples(img_path) cv2.imshow('Result', result_img) cv2.waitKey(0) cv2.destroyAllWindows()
保留識別物體的尺寸的數據,之后要用在別的地方上。
機械臂運動控制算法
機械臂的控制方法
# 這個方法控制機械臂的關節進行運動 mc.send_angles([angle_list],speed) # 這個方法用坐標控制機械臂在空間上進行運動 mc.send_coords([coords_list],speed,mode) example: mc.send_angles([0,0,0,0,0,0],100) time.sleep(2) mc.send_coords([(-3.6), 30.32, (-45.79), (-46.84), 97.38, 0.35],100,1)
獲得物體的尺寸數據之后,定義機械臂末端距離物體的合理位置
def calculate_angles_for_distance(distance): # 根據理想距離計算機械臂的關節角度 # 這里的計算需要根據實際情況和物理參數進行調整 return [0, -10, distance * 0.1, 0, 30, 0] def calculate_adjusted_angles(action_angles): # 基于特定動作后可能需要的坐標調整計算新的角度 # 這里僅為示例,具體邏輯根據需要調整 return [angle * 1.1 for angle in action_angles]
再選擇模式對應的運動控制
#360全景拍攝 # 定義具體的拍攝模式 def shoot_mode_360(ideal_distance): print("執行360°全景拍攝模式") # 首先,移動到理想拍攝位置 move_to_ideal_position(ideal_distance) # 處理理想距離 ideal_ratio = ratio # 執行360°全景拍攝的特定動作 mc.send_angles([0, 0, 0, 0, 0, 0], speed=15) time.sleep(1) mc.send_coords([angle * ratio for angle in angles_list] ,15) time.sleep(1) mc.send_coords([angle * ratio for angle in angles_list] ,15) time.sleep(1) mc.send_coords([angle * ratio for angle in angles_list] ,15)
手機相機的調用
在開發過程中,嘗試調用手機攝像頭接口以實現自動化拍攝功能,我遇到了一系列挑戰。作為我的第一次深入探索AVFoundation iOS框架,目標是激活并控制手機的攝像頭,我發現自己還未能完全成功實現這一功能。當前的難點主要集中在如何準確調用攝像頭進行視頻拍攝,以及在拍攝過程中如何通過軟件調整來補償圖像的可能拉伸,這需要對機械臂的運動進行精細控制。
這些問題標志著我后續研究的重點方向,需要我繼續深入學習AVFoundation框架的使用,特別是其控制攝像頭的具體方法,并探索如何將這些控制整合到機械臂的運動調整中,以確保最終拍攝出的視頻質量符合預期。
總結
隨著這次項目記錄的結束,我意識到雖然項目尚有諸多不足,但這次嘗試將兩個獨立設備在不同的框架下協同工作,對我來說仍是一次寶貴的經驗。確實,整個項目目前尚未達到我心中的理想狀態。然而,我認為這個項目探索的方向極具潛力,考慮到市面上已經存在能夠拍攝出令人贊嘆效果的專業攝影機械臂,這強化了我對項目潛在價值的信念。
機械臂的應用已經廣泛滲透到我們的日常生活中,無論是在工業生產、日常服務,還是在藝術創作領域,都發揮著越來越重要的作用。隨著人工智能技術的不斷進步和普及,AI與機器人的結合無疑將成為未來技術發展的重要趨勢。我對機器人技術的未來發展抱有極大的期待,相信未來它們將在更多領域發揮出驚人的能力和創造力。
如果你對我的項目感興趣,或者有任何想法和建議,非常歡迎與我交流。你的反饋將對我繼續改進和完善這個項目提供寶貴的幫助。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
31079瀏覽量
222266 -
開源
+關注
關注
3文章
4207瀏覽量
46143 -
python
+關注
關注
57文章
4876瀏覽量
90035 -
機械臂
+關注
關注
14文章
596瀏覽量
26125 -
大象機器人
+關注
關注
0文章
86瀏覽量
376
發布評論請先 登錄
大象機器人產品賦能全球尖端科研與教育實踐
復合機器人對比傳統AGV和機械臂的優勢何在?

高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
傳統測試設備的局限與協作機械臂的破局

對比AGV和協作臂,為什么要選擇復合機器人?有哪些場景和優勢

機器人看點:越疆機器人正式發布六足仿生機器狗 智元公布機器人運動控制模型專利
RDK × 腿臂機器人:這只 “機械汪” 竟會說人話、走花路!

極海G32R501工業六軸機械臂參考方案釋放工業4.0產業價值

大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品

工業機器人與協作機器人概念不同


大象機器人攜手地瓜機器人打造全國產輕量級教育協作機械臂新標桿

大象機器人推出myCobot 280 RDK X5,攜手地瓜機器人共建智能教育機




 工商網監
工商網監
評論