") 泰來(lái)三維|三維掃描點(diǎn)云數(shù)據(jù)怎么處理如何建模
泰來(lái)三維|三維掃描點(diǎn)云數(shù)據(jù)怎么處理如何建模

一、三維掃描是什么?
三維激光掃描技術(shù)是上世紀(jì)九十年代中期開(kāi)始出現(xiàn)的一項(xiàng)技術(shù),是繼GPS空間定位系統(tǒng)之后又一項(xiàng)測(cè)繪技術(shù)的突破。它通過(guò)高速激光掃描測(cè)量的方法,大面積高分辨率地快速獲取被測(cè)對(duì)象表面的三維坐標(biāo)數(shù)據(jù),為快速建立物體的三維影像模型提供了一種全新的技術(shù)手段。
三維激光掃描技術(shù)利用激光測(cè)距的原理,通過(guò)記錄被測(cè)物體表面大量的密集的點(diǎn)的三維坐標(biāo)、反射率和紋理等信息,可快速?gòu)?fù)建出被測(cè)目標(biāo)的三維模型及線、面、體等各種圖件數(shù)據(jù),越密集的點(diǎn)云創(chuàng)建的模型越精確(這個(gè)過(guò)程稱做三維重建)。
二、三維掃描有什么優(yōu)勢(shì)?
1.數(shù)據(jù)獲取自動(dòng)化,一鍵式操作
三維激光掃描儀高度智能化,無(wú)需人工干預(yù),三維激光掃描儀自動(dòng)發(fā)射的激光即可測(cè)得目標(biāo)物表面點(diǎn)的三維坐標(biāo)信息,無(wú)需復(fù)雜操作,實(shí)現(xiàn)一鍵自動(dòng)掃描。
2.“快”( 100萬(wàn)點(diǎn)每秒)
“快”是掃描儀誕生產(chǎn)生的概念,在常規(guī)測(cè)量手段里,一個(gè)點(diǎn)的測(cè)量需要花在2-5秒左右,在復(fù)雜的場(chǎng)景里,可能要花幾分鐘的時(shí)間對(duì)一點(diǎn)的坐標(biāo)進(jìn)行測(cè)量。
三維激光掃描儀的誕生改變了這一現(xiàn)狀,現(xiàn)在三維激光掃描儀最大速度已經(jīng)達(dá)到100萬(wàn)點(diǎn)每秒,這是三維激光掃描儀對(duì)物體詳細(xì)描述的基本保證,古文體,工廠管道,隧道,地形等復(fù)雜的領(lǐng)域無(wú)法測(cè)量已經(jīng)成為過(guò)去式
3.數(shù)據(jù)獲取全要素,高密度、高精度(誤差為毫米級(jí))
三維激光掃描以水平和豎直方向同時(shí)全方位快速的獲取高精度,高分辨率的海量的點(diǎn)位數(shù)據(jù)。現(xiàn)場(chǎng)所有肉眼能見(jiàn)的物體(玻璃、水、鏡面反射物體除外)都可以掃描得到。
4.數(shù)據(jù)是三維矢量,簡(jiǎn)單直觀
三維激光掃描儀每次測(cè)量的數(shù)據(jù)不僅僅包含X,Y,Z點(diǎn)的信息,還包括R,G,B顏色信息,同時(shí)還有物體反射率的信息,這樣全面的信息能給人一種物體在電腦里真實(shí)再現(xiàn)的感覺(jué)。
5.非接觸測(cè)量方式,保證作業(yè)安全
采用非接觸目標(biāo)的方法,人員無(wú)需接觸被測(cè)物體,即可直接采集物體表面的三維數(shù)據(jù),降低了測(cè)量風(fēng)險(xiǎn)。能有效避免異形建筑,危險(xiǎn)場(chǎng)景(高空,電廠,輻射)的測(cè)量危險(xiǎn),為測(cè)量提供安全。
6.、數(shù)字化兼容性好
通過(guò)直接獲取數(shù)字信號(hào)采集的數(shù)據(jù),所以具有全數(shù)字特征,方便進(jìn)行后期處理和輸出,與Revit、AutoCAD、SketchUp、ArchiCad、Bentley、Tekla等軟件有很好的共享性。
三、點(diǎn)云怎么產(chǎn)生?
點(diǎn)云是目標(biāo)表面特性的海量點(diǎn)集合,點(diǎn)云越密集,反映的圖像細(xì)節(jié)和信息就越多。
當(dāng)我們利用三維激光掃描儀掃描某一建筑表面時(shí),我們可以得到大量密集的點(diǎn),這些點(diǎn)帶有三維坐標(biāo)(XYZ)、激光反射強(qiáng)度和和顏色信息(RGB)等信息,它們共同創(chuàng)建了可識(shí)別的三維結(jié)構(gòu)。
下面,我們以 faro premium 350 掃描儀為例,一起來(lái)看下點(diǎn)云數(shù)據(jù)的具體創(chuàng)建過(guò)程。
faro premium 350
三維激光掃描儀主要掃描過(guò)程和技術(shù)流程如下:
faro premium 350三維激光掃描儀最終采集的數(shù)據(jù)以點(diǎn)云和圖像的形式儲(chǔ)存在掃描儀設(shè)備里,運(yùn)用專門進(jìn)行一定處理后,能獲取建筑物的相對(duì)位置信息、尺寸、紋理和形狀,進(jìn)而建立真實(shí)的物體數(shù)據(jù)模型。
四、點(diǎn)云數(shù)據(jù)怎么處理
在三維激光掃描的過(guò)程中,點(diǎn)云數(shù)據(jù)的獲取常常會(huì)受到物體遮擋、光照不均勻等因素的影響,容易造成復(fù)雜形狀物體的區(qū)域掃描盲點(diǎn),形成孔洞。同時(shí)由于掃描測(cè)量范圍有限,對(duì)于大尺寸物體或者大范圍場(chǎng)景,不能一次性進(jìn)行完整測(cè)量,必須多次掃描測(cè)量,因此掃描結(jié)果往往是多塊具有不同坐標(biāo)系統(tǒng)且存在噪聲的點(diǎn)云數(shù)據(jù),不能夠完全滿足人們對(duì)數(shù)字化模型真實(shí)度和實(shí)時(shí)性的要求,所以需要對(duì)三維點(diǎn)云數(shù)據(jù)進(jìn)行去噪、簡(jiǎn)化、配準(zhǔn)以及補(bǔ)洞等預(yù)處理。
通過(guò)數(shù)據(jù)預(yù)處理,可以有效剔除點(diǎn)云中的噪聲和外點(diǎn),在保持幾何特征的基礎(chǔ)上實(shí)現(xiàn)點(diǎn)云數(shù)據(jù)簡(jiǎn)化,并將不同角度掃描的點(diǎn)云統(tǒng)一到同一坐標(biāo)系下,為后續(xù)的曲面構(gòu)建及三維實(shí)體模型生成提供穩(wěn)健的數(shù)據(jù)基礎(chǔ)。
圖片
五、點(diǎn)云怎么建模?
點(diǎn)云建模需要利用實(shí)景建模軟件ContextCapture,ContextCapture可以更好地評(píng)估點(diǎn)云并生成更精確的三維模型。
ContextCapture可以對(duì)點(diǎn)云進(jìn)行增強(qiáng)、分割、分類,并與工程模型相結(jié)合。利用ContextCapture的高級(jí)三維建模、橫截面切割、斷裂線和地形提取功能,能快速高效地對(duì)竣工條件進(jìn)行建模并支持設(shè)計(jì)流程。
點(diǎn)云數(shù)據(jù)與實(shí)景影像融合成果
基于點(diǎn)云數(shù)據(jù),ContextCapture還可以從生成非常龐大的可縮放地形模型。通過(guò)與原始數(shù)據(jù)源同步,可縮放地形模型可實(shí)時(shí)更新到最新。這樣做的價(jià)值在于,擁有所有數(shù)據(jù)的全局、最新和綜合表示,并用于使用各種
顯示模式和執(zhí)行分析,以及生成動(dòng)畫和可視化效果。
激光掃描車與實(shí)景影像融合成果
審核編輯 黃宇
-
云數(shù)據(jù)
+關(guān)注
關(guān)注
0文章
118瀏覽量
17037 -
激光掃描
+關(guān)注
關(guān)注
0文章
122瀏覽量
12070 -
三維掃描
+關(guān)注
關(guān)注
1文章
324瀏覽量
8254
發(fā)布評(píng)論請(qǐng)先 登錄
【OFDR】實(shí)時(shí)感知、動(dòng)態(tài)重構(gòu)與歷史狀態(tài)回溯!昊衡科技-三維場(chǎng)重構(gòu)軟件

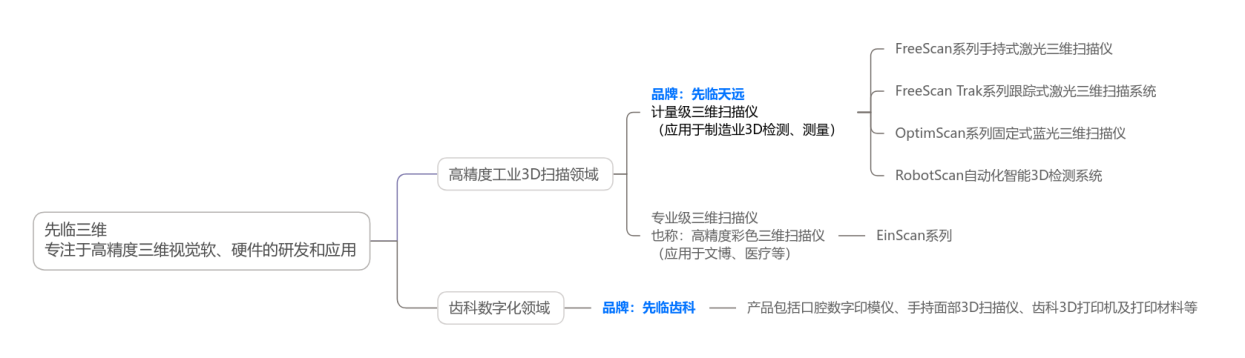
一文讀懂 | 三維視覺(jué)領(lǐng)域國(guó)家級(jí)制造業(yè)單項(xiàng)冠軍——先臨三維的品牌布局
三維掃描儀革命性升級(jí):先臨三維FreeScan Omni實(shí)現(xiàn)單機(jī)無(wú)線掃描+檢測(cè)

復(fù)雜曲面零件的光學(xué)三維掃描測(cè)量逆向 - 激光三維掃描儀

AI 驅(qū)動(dòng)三維逆向:點(diǎn)云降噪算法工具與機(jī)器學(xué)習(xí)建模能力的前沿應(yīng)用
從 48 小時(shí)到 4 小時(shí):三維逆向工程中自動(dòng)化工具鏈如何重構(gòu)掃描建模效率

請(qǐng)幫幫我:AutoCAD三維顯示問(wèn)題,和人正常視角相背
無(wú)人機(jī)航測(cè)三維建模遇難題?索尼FCB-EV9520L來(lái)破局!
蔡司三維掃描儀第三方代抄數(shù)檢測(cè)機(jī)構(gòu)

三維掃描效率革命:自由維度(手持 / 機(jī)械臂)相較固定式方案的 N 倍產(chǎn)能提升
為何激光三維掃描無(wú)需噴粉也能精準(zhǔn)測(cè)量高反光物體?—— 基于光學(xué)抗反射技術(shù)的突破
激光三維掃描技術(shù):無(wú)噴粉條件下高反光表面三維重建的光學(xué)原理與應(yīng)用
VirtualLab:光學(xué)系統(tǒng)的三維可視化
蔡司掃描儀ScanPort三維抄數(shù)建模一鍵式檢測(cè)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論