 PCL中最遠點采樣是什么
PCL中最遠點采樣是什么

最遠點采樣(Farthest Point Sampling)
這里我們來單獨看一下調用代碼,這里可以看到PCL中支持直接調用farthest_sampling這個函數可以實現最遠點采樣。
最遠點采樣(Farthest Point Sampling)是一種非常常用的采樣算法,由于能夠保證對樣本的均勻采樣,被廣泛使用,像3D點云深度學習框架中的PointNet++對樣本點進行FPS采樣再聚類作為感受野,3D目標檢測網絡VoteNet對投票得到的散亂點進行FPS采樣再進行聚類,6D位姿估計算法PVN3D中用于選擇物體的8個特征點進行投票并計算位姿。FPS算法原理:
1、輸入點云有N個點,從點云中選取一個點P0作為起始點,得到采樣點集合S={P0};
2、計算所有點到P0的距離,構成N維數組L,從中選擇最大值對應的點作為P1,更新采樣點集合S={P0,P1};
3、計算所有點到P1的距離,對于每一個點Pi,其距離P1的距離如果小于L[i],則更新L[i] = d(Pi, P1),因此,數組L中存儲的一直是每一個點到采樣點集合S的最近距離;
3、選取L中最大值對應的點作為P2,更新采樣點集合S={P0,P1,P2};
4、重復2-4步,一直采樣到N’個目標采樣點為止。
std::vector< pcl::PointCloud< pcl::PointXYZ >> input_point_clouds(1);
std::vector< pcl::PointCloud< pcl::PointXYZ >> output_point_clouds;
ASSERT_NE(pcl::io::loadPLYFile< pcl::PointXYZ >(STR(INPUT_POINT_CLOUD_PATH),
input_point_clouds[0]), -1) < < "Couldn't read file test point cloud file";
farthest_sampling::samplePointCloudsCuda(input_point_clouds, output_point_clouds, 4096);
boost::filesystem::path output_path = STR(OUTPUT_POINT_CLOUD_PATH);
if (output_path.has_parent_path() && !boost::filesystem::exists(output_path.parent_path()))
{
boost::filesystem::create_directories(output_path.parent_path());
}
pcl::io::savePLYFile(STR(OUTPUT_POINT_CLOUD_PATH), output_point_clouds[0]);
ASSERT_EQ(output_point_clouds[0].size(), 4096);
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
plc
+關注
關注
5051文章
14594瀏覽量
486915 -
函數
+關注
關注
3文章
4417瀏覽量
67504 -
采樣
+關注
關注
1文章
128瀏覽量
26476
發布評論請先 登錄
相關推薦
熱點推薦
當PCL翻轉PCLATH不增加,PC中的這個翻轉不改變PCLATH位
你好。PIC16F87具有PCL存儲的13位PC、LSB字節、PCLSATE中的MSB 5位。問題是當PCL翻轉PCLATH不增加時。請記住,PC中的這個翻轉不改變PCLATH位:它們必須顯式地更改
發表于 09-26 10:33
關于232的NCL,PCL的疑問
有沒有大神接觸過這種232通訊的儀表,上面有NCL RXD,NCL TXD;PCL RXD,PCL TXD。這種能用DB9的芯片去采集數據嗎?我用DB9的RXD去接它的 NCL TXD,數據偶爾會有一位的偏移,請問該怎么正確的采集它的數據,拜謝
發表于 11-07 16:15
PCL6143運動控制器原理及應用
PCL6143運動控制器的原理及應用 可以用于設計開發相應的芯片電路。介紹了PCL6143 的功能結構、主要寄存器以及指令系統。設計了一款基于PC104總線的四軸運動控制卡, 介紹了如何編寫運動控制卡的功能函數庫。
發表于 09-26 08:14
系統辨識中最優采樣間隔的確定
針對如何確定連續系統辨識中最優采樣間隔的問題,根據復平面中辨識模型的特征值到原點的距離判斷采樣間隔是否合理,利用折半查找算法,設計了一種在給定的范圍內尋找系統辨識
發表于 07-24 15:41
?0次下載
車載自組網中最遠轉發機制的可靠性改進
車載自組網是傳統的移動自組織網絡在交通道路上的應用。在車載自組網中,最遠轉發機制口3能夠有效降低數據傳播跳數,減少冗余發送,但最遠轉發機制的可靠性將因最遠節點失效而受到影響。在分析和實驗驗證節點高速
發表于 11-25 11:52
?0次下載

PCL中基礎下采樣介紹
顧名思義,隨機下采樣就似乎在原始點云中隨機采樣一定點數的點。這種方法最終得到的點云數量也是固定的。 pcl::PointCloud ::Ptr cloud_sub( new pcl
PCL中法線空間采樣介紹
法線空間采樣 NormalSpaceSampling即:法線空間采樣,它在法向量空間內均勻隨機抽樣,使所選點之間的法線分布盡可能大,結果表現為地物特征變化大的地方剩余點較多,變化小的地方剩余點稀少
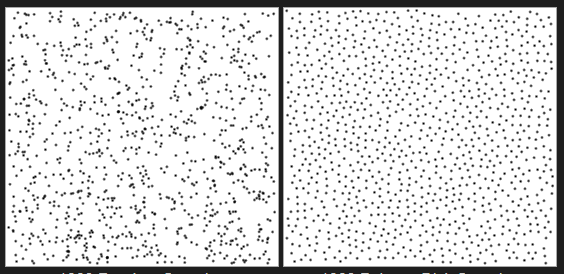
PCL泊松盤采樣具體流程
泊松盤采樣 泊松盤采樣(possion disk sampling)的特點是任何兩個點的距離都不會隔得太近。 比如下圖,左邊是隨機生成的點,右邊是泊松盤采樣生成的點。 具體流程如下: 1、設定好兩個
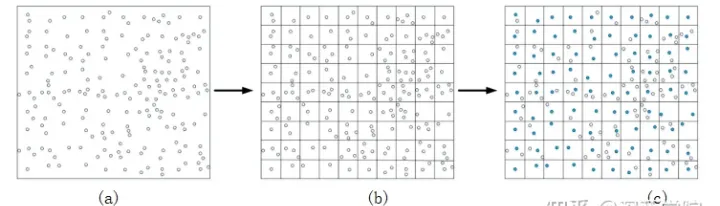
PCL中非均勻體素采樣介紹
非均勻體素采樣 SamplingSurfaceNormal,將輸入空間劃分為網格,直到每個網格中最多包含N個點,并在每個網格中隨機采樣點。 使用每個網格的N個點計算法線。 在網格內采樣



 工商網監
工商網監
評論