") 關(guān)于模擬仿真測(cè)試可信度評(píng)估方法的研究(上)——評(píng)估框架
關(guān)于模擬仿真測(cè)試可信度評(píng)估方法的研究(上)——評(píng)估框架

引言
隨著智能網(wǎng)聯(lián)汽車技術(shù)及產(chǎn)業(yè)的快速發(fā)展,預(yù)期功能安全等新的安全風(fēng)險(xiǎn)也日益凸顯,傳統(tǒng)的測(cè)試手段已無法滿足對(duì)自動(dòng)駕駛功能測(cè)試與驗(yàn)證的需求。模擬仿真測(cè)試技術(shù)以其高效率、低成本、高安全、高覆蓋度等優(yōu)勢(shì),成為自動(dòng)駕駛功能測(cè)試驗(yàn)證的重要支柱[1],已得到業(yè)內(nèi)廣泛認(rèn)可。基于賽目科技前期提出的智能網(wǎng)聯(lián)汽車產(chǎn)品測(cè)試策略研究成果,本篇文章提出模擬仿真測(cè)試可信度評(píng)估框架及一系列評(píng)估方法,為后續(xù)開展仿真測(cè)試可信度評(píng)估提供參考。
本系列文章將分上、下兩篇,分別闡釋賽目科技提出的模擬仿真測(cè)試可信度“評(píng)估框架”和“評(píng)估方法”兩個(gè)核心問題。
可信度評(píng)估框架
聯(lián)合國(guó)世界車輛法規(guī)協(xié)調(diào)論壇(UN/WP.29)自動(dòng)駕駛驗(yàn)證方法非正式工作組(VMAD IWG)針對(duì)自動(dòng)駕駛功能提出新評(píng)估和測(cè)試方法(New Assessment/Test Method for Automated Driving,NATM)[2],包括場(chǎng)景目錄,以及模擬仿真測(cè)試、封閉場(chǎng)地測(cè)試、實(shí)際道路測(cè)試、審核評(píng)估和在用監(jiān)測(cè)報(bào)告等5類技術(shù)手段(以下簡(jiǎn)稱“多支柱法”),支撐ADS的安全性驗(yàn)證,如圖1所示。
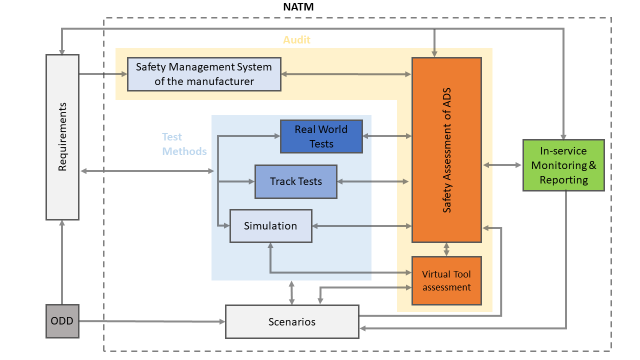
圖1 VMAD多支柱法框架
其中,仿真作為“多支柱法”的重要內(nèi)容,在智能網(wǎng)聯(lián)汽車綜合安全評(píng)估中發(fā)揮著至關(guān)重要的作用。對(duì)此,NATM中針對(duì)仿真測(cè)試提出了可信度評(píng)估框架與流程,主要包含仿真試驗(yàn)的管理、分析、驗(yàn)證和確認(rèn)四大組成部分,如圖2所示。
·建模和仿真管理:數(shù)據(jù)譜系、團(tuán)隊(duì)經(jīng)驗(yàn)、發(fā)布管理。
·建模和仿真分析:邏輯場(chǎng)景、關(guān)鍵性評(píng)估、工具鏈范圍/說明、假設(shè)和限制、相關(guān)性閾值。
·建模和仿真驗(yàn)證:代碼驗(yàn)證、計(jì)算驗(yàn)證、敏感性分析。
·建模和仿真確認(rèn):相關(guān)系統(tǒng)(如傳感器、車輛及其他子系統(tǒng))、集成系統(tǒng)。
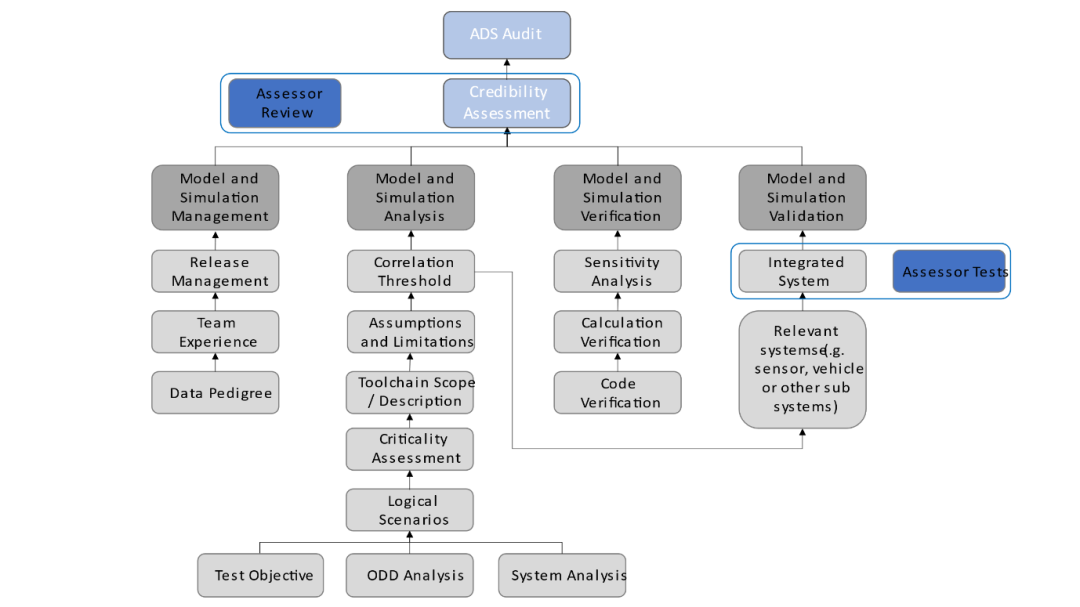 圖2 仿真試驗(yàn)可信度評(píng)估框架
國(guó)內(nèi)針對(duì)仿真測(cè)試的標(biāo)準(zhǔn)化研究,《自動(dòng)駕駛功能仿真測(cè)試標(biāo)準(zhǔn)化需求研究報(bào)告》中指出模擬仿真測(cè)試應(yīng)遵循的基本原則為全面性、真實(shí)性和可重復(fù)性,其中,真實(shí)性是指仿真測(cè)試的場(chǎng)景參數(shù)應(yīng)基于實(shí)際,邏輯參數(shù)設(shè)置合理,并且測(cè)試輸出結(jié)果應(yīng)與實(shí)車測(cè)試保持基本一致[3]。2022年11月,工信部聯(lián)合公安部發(fā)布的《關(guān)于開展智能網(wǎng)聯(lián)汽車準(zhǔn)入和上路通行試點(diǎn)工作的通知(征求意見稿)》中針對(duì)仿真測(cè)試驗(yàn)證也明確要求:應(yīng)證明使用的模擬仿真測(cè)試工具鏈置信度,以及車輛動(dòng)力學(xué)、傳感器等模型可信度,并通過與封閉場(chǎng)地和實(shí)際道路測(cè)試結(jié)果對(duì)比等手段驗(yàn)證模擬仿真測(cè)試的可信度[4]。
基于以上研究背景,我們得出模擬仿真測(cè)試的實(shí)現(xiàn)需要模型、工具和場(chǎng)景共同作用,三者緊密耦合,相輔相成。因此賽目科技提出一種模擬仿真測(cè)試可信度評(píng)估框架,其中主要包括仿真工具置信度、仿真模型可信度以及測(cè)試場(chǎng)景可信度,如圖3所示。
圖2 仿真試驗(yàn)可信度評(píng)估框架
國(guó)內(nèi)針對(duì)仿真測(cè)試的標(biāo)準(zhǔn)化研究,《自動(dòng)駕駛功能仿真測(cè)試標(biāo)準(zhǔn)化需求研究報(bào)告》中指出模擬仿真測(cè)試應(yīng)遵循的基本原則為全面性、真實(shí)性和可重復(fù)性,其中,真實(shí)性是指仿真測(cè)試的場(chǎng)景參數(shù)應(yīng)基于實(shí)際,邏輯參數(shù)設(shè)置合理,并且測(cè)試輸出結(jié)果應(yīng)與實(shí)車測(cè)試保持基本一致[3]。2022年11月,工信部聯(lián)合公安部發(fā)布的《關(guān)于開展智能網(wǎng)聯(lián)汽車準(zhǔn)入和上路通行試點(diǎn)工作的通知(征求意見稿)》中針對(duì)仿真測(cè)試驗(yàn)證也明確要求:應(yīng)證明使用的模擬仿真測(cè)試工具鏈置信度,以及車輛動(dòng)力學(xué)、傳感器等模型可信度,并通過與封閉場(chǎng)地和實(shí)際道路測(cè)試結(jié)果對(duì)比等手段驗(yàn)證模擬仿真測(cè)試的可信度[4]。
基于以上研究背景,我們得出模擬仿真測(cè)試的實(shí)現(xiàn)需要模型、工具和場(chǎng)景共同作用,三者緊密耦合,相輔相成。因此賽目科技提出一種模擬仿真測(cè)試可信度評(píng)估框架,其中主要包括仿真工具置信度、仿真模型可信度以及測(cè)試場(chǎng)景可信度,如圖3所示。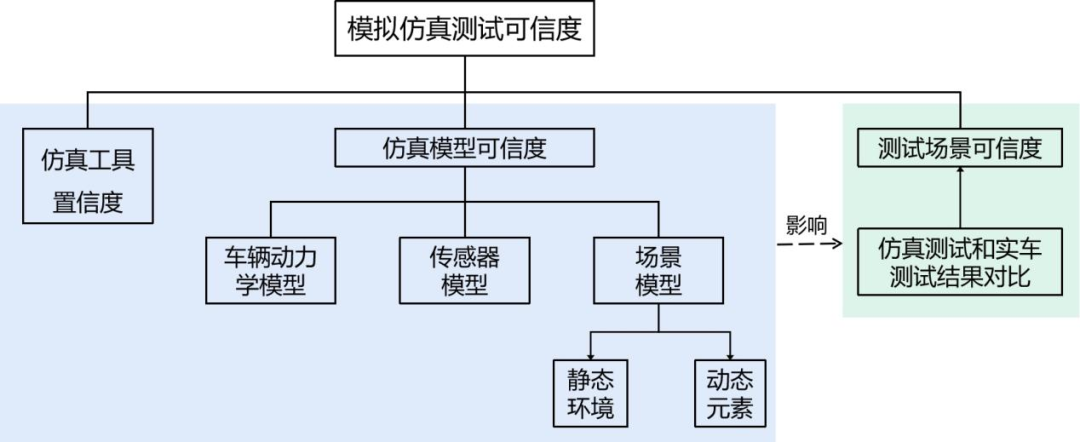 圖3 模擬仿真測(cè)試可信度評(píng)估框架
圖3 模擬仿真測(cè)試可信度評(píng)估框架仿真工具置信度
仿真測(cè)試工具包含場(chǎng)景管理模塊、仿真引擎、評(píng)價(jià)模塊等,通過搭建智能網(wǎng)聯(lián)汽車仿真測(cè)試所需的測(cè)試環(huán)境,反饋相關(guān)感知信息及車控指令,并形成自動(dòng)駕駛算法模擬仿真測(cè)試評(píng)估結(jié)果,是完成自動(dòng)駕駛模擬仿真測(cè)試的重要手段。仿真工具的置信度要求是仿真工具本身不應(yīng)出現(xiàn)計(jì)算錯(cuò)誤、算法邏輯變更、超預(yù)期的信號(hào)時(shí)序變更、同步狀態(tài)改變等問題[1],通過功能安全實(shí)現(xiàn)以上要求是主要的途徑之一。參考ISO 26262 [5]汽車功能安全標(biāo)準(zhǔn)中汽車軟件產(chǎn)品開發(fā)的要求,需要從設(shè)計(jì)開發(fā)到測(cè)試驗(yàn)證進(jìn)行全流程的安全評(píng)估保障,主要工作包括:需求分析、系統(tǒng)架構(gòu)設(shè)計(jì)、詳細(xì)設(shè)計(jì)、單元測(cè)試、集成測(cè)試、功能測(cè)試,以驗(yàn)證仿真工具具備的置信度水平,具體流程如圖4所示。
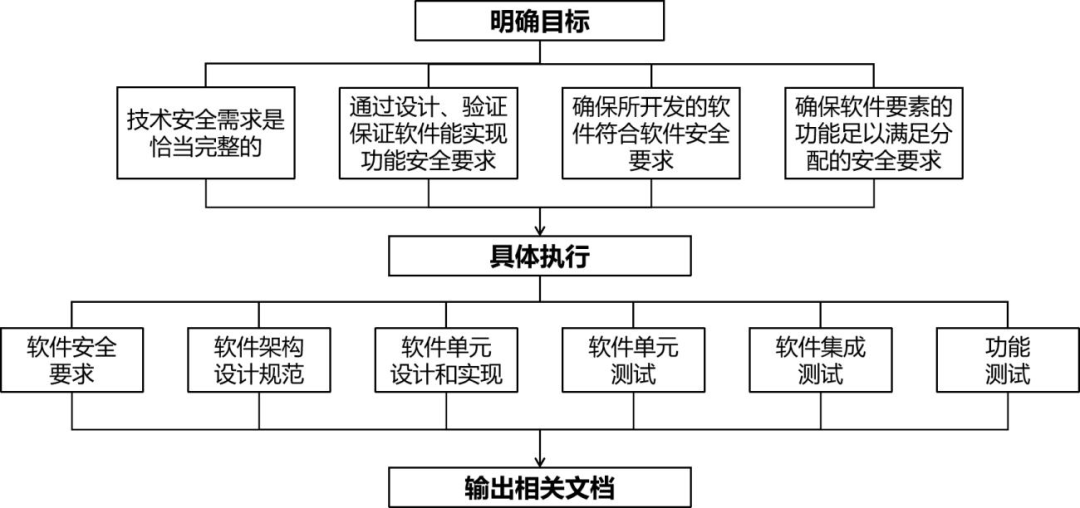 圖4 仿真工具可信度評(píng)估框架仿真模型可信度
圖4 仿真工具可信度評(píng)估框架仿真模型可信度(1)車輛動(dòng)力學(xué)模型
車輛動(dòng)力學(xué)模型是汽車仿真技術(shù)的重要組成部分,主要作用是模擬車輛在不同行駛狀態(tài)時(shí)的動(dòng)力學(xué)行為[4],根據(jù)ADAS或者自動(dòng)駕駛系統(tǒng)的輸入,結(jié)合路面特性對(duì)車輛本身進(jìn)行仿真,完成閉環(huán)的測(cè)試。 針對(duì)車輛動(dòng)力學(xué)模型的可信度驗(yàn)證,賽目科技提出“試驗(yàn)工況+對(duì)比參數(shù)”的驗(yàn)證框架,主要通過配置車輛動(dòng)力學(xué)參數(shù)、構(gòu)建典型試驗(yàn)工況、選取對(duì)比參數(shù),進(jìn)行仿真與實(shí)車測(cè)試結(jié)果的比對(duì),具體流程如圖5所示。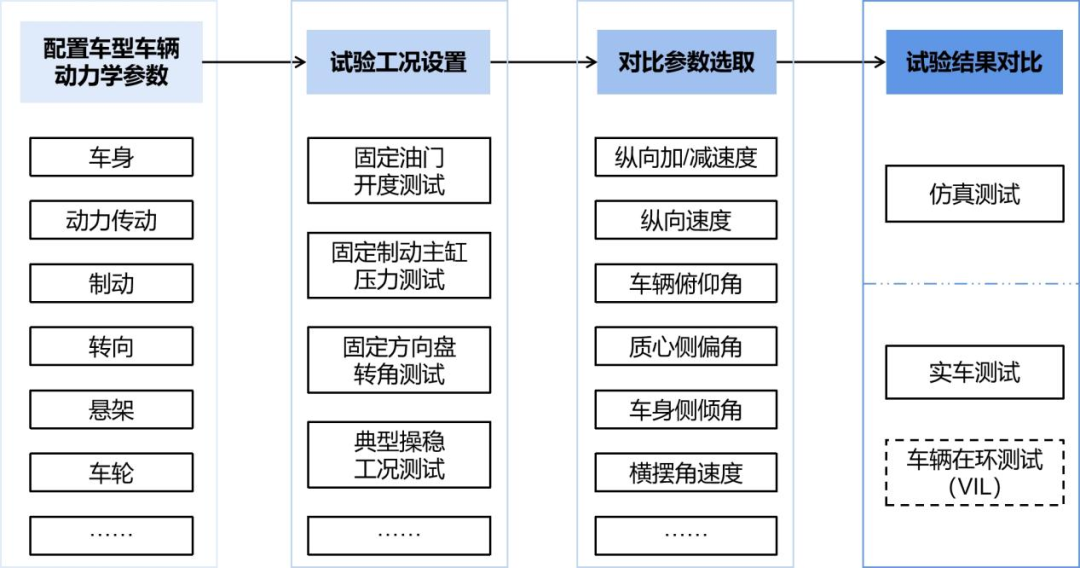
圖5 車輛動(dòng)力學(xué)模型可信度評(píng)估框架
(2)傳感器模型
傳感器建模是其在仿真環(huán)境中感知周圍對(duì)象信息的必要環(huán)節(jié),可以實(shí)現(xiàn)對(duì)感知算法效果的驗(yàn)證與評(píng)估。傳感器模型配置主要是對(duì)攝像頭、毫米波雷達(dá)、激光雷達(dá)、超聲波雷達(dá)的物理特性根據(jù)仿真測(cè)試需求進(jìn)行建模。 針對(duì)傳感器模型的可信度驗(yàn)證,賽目科技提出“測(cè)試環(huán)境構(gòu)建+對(duì)比參數(shù)”的驗(yàn)證框架,主要通過設(shè)置傳感器參數(shù)、選取對(duì)比參數(shù)、構(gòu)建典型場(chǎng)景,進(jìn)行仿真與真實(shí)傳感器反饋結(jié)果的比對(duì),具體流程如圖6所示。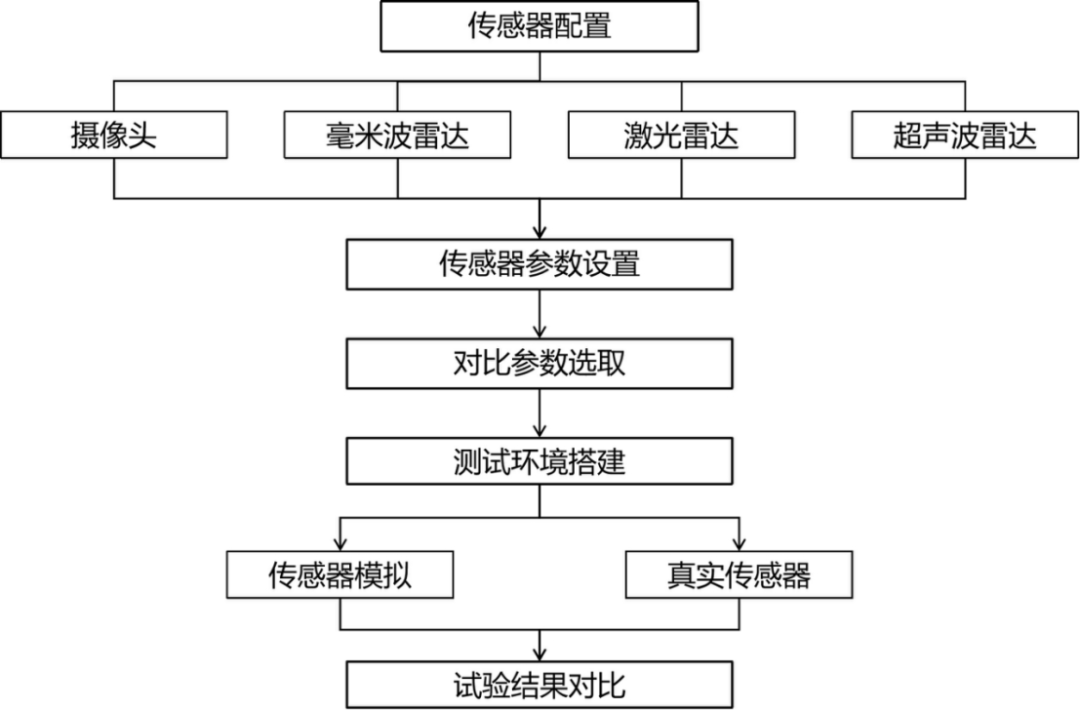
圖6 傳感器模型可信度評(píng)估框架
測(cè)試場(chǎng)景可信度
在自動(dòng)駕駛模擬仿真測(cè)試過程中,場(chǎng)景作為最重要的核心要素之一,可以部署到仿真環(huán)境或者真實(shí)的受控測(cè)試場(chǎng)地中,從而對(duì)被測(cè)車輛的特定功能在行駛環(huán)境下的表現(xiàn)進(jìn)行試驗(yàn)和分析[6]。針對(duì)測(cè)試場(chǎng)景的可信度驗(yàn)證,賽目科技提出通過選取對(duì)比參數(shù)、實(shí)車標(biāo)定試驗(yàn)、搭建測(cè)試場(chǎng)景,進(jìn)行仿真與實(shí)車試驗(yàn)結(jié)果的比對(duì),具體流程如圖7所示。
·標(biāo)準(zhǔn)規(guī)范:參考GB/T《智能網(wǎng)聯(lián)汽車 自動(dòng)駕駛功能仿真試驗(yàn)方法及要求》(草案)和GB/T 41798-2022《智能網(wǎng)聯(lián)汽車 自動(dòng)駕駛功能場(chǎng)地試驗(yàn)方法及要求》[7]。
·試驗(yàn)場(chǎng)景:根據(jù)自動(dòng)駕駛功能的設(shè)計(jì)運(yùn)行條件確定可信度驗(yàn)證的測(cè)試場(chǎng)景集。
·試驗(yàn)參數(shù):根據(jù)測(cè)試場(chǎng)景中是否存在交互行為選取各場(chǎng)景下的對(duì)比試驗(yàn)參數(shù)。
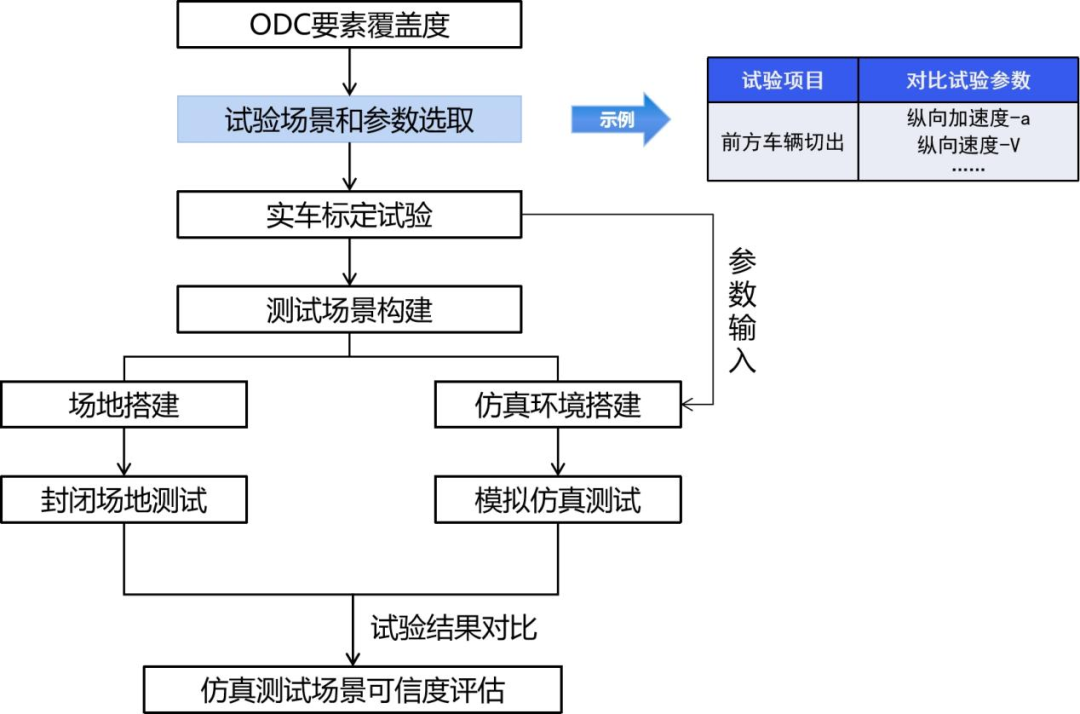
圖7 仿真測(cè)試場(chǎng)景可信度評(píng)估流程
開展仿真測(cè)試與實(shí)車測(cè)試結(jié)果的一致性分析,主要體現(xiàn)為:智能網(wǎng)聯(lián)汽車在同一測(cè)試場(chǎng)景下,模擬仿真測(cè)試和實(shí)車測(cè)試的試驗(yàn)結(jié)果趨勢(shì)應(yīng)保持一致,特征參數(shù)(如縱向速度、縱向加/減速度等)誤差在一定范圍內(nèi),從而驗(yàn)證仿真測(cè)試場(chǎng)景的可信度。
結(jié)語(yǔ)
本文是《模擬仿真測(cè)試可信度評(píng)估方法研究》系列的上篇,主要描述了仿真測(cè)試可信度評(píng)估的“評(píng)估框架”,主要包括仿真工具置信度、仿真模型可信度以及測(cè)試場(chǎng)景可信度。通過建立仿真可信度評(píng)估研究框架,有利于從總體上把握可信度評(píng)估的基本步驟和方法,有效推進(jìn)可信度評(píng)估研究和實(shí)踐。
下一期《模擬仿真測(cè)試可信度評(píng)估方法研究》下篇將重點(diǎn)介紹仿真測(cè)試可信度評(píng)估的“評(píng)估方法”,賽目科技對(duì)比分析并提出了一種定量的可信度評(píng)估指標(biāo),敬請(qǐng)期待。
參考文獻(xiàn)
[1]劉法旺,何豐,周時(shí)瑩等.基于場(chǎng)景的智能網(wǎng)聯(lián)汽車模擬仿真測(cè)試評(píng)估方法與實(shí)踐[J].汽車工程學(xué)報(bào),2023,13(02):135-145.
[2]New Assessment/Test Method for Automated Driving (NATM) Guidelines for Validating Automated Driving System (ADS). Informal Working Group (IWG) on Validation Methods for Automated Driving (VMAD),2022.
[3]自動(dòng)駕駛功能仿真測(cè)試標(biāo)準(zhǔn)化需求研究報(bào)告[R].全國(guó)汽車標(biāo)準(zhǔn)化技術(shù)委員會(huì),智能網(wǎng)聯(lián)汽車分技術(shù)委員會(huì),2020.
[4]工業(yè)和信息化部和公安部.《關(guān)于開展智能網(wǎng)聯(lián)汽車準(zhǔn)入和上路通行試點(diǎn)工作的通知(征求意見稿)》, 2022.
[5]ISO 26262Road vehicles -- Functional safety
[6]馮屹,王兆.自動(dòng)駕駛測(cè)試場(chǎng)景技術(shù)發(fā)展與應(yīng)用[M].北京:機(jī)械工業(yè)出版社, 2020.
[7]GB/T 41798-2022 智能網(wǎng)聯(lián)汽車 自動(dòng)駕駛功能場(chǎng)地試驗(yàn)方法及要求[S].
掃描二維碼
關(guān)注賽目科技
 ?
?專注智能網(wǎng)聯(lián)汽車
測(cè)試丨驗(yàn)證丨評(píng)價(jià)研究
作者:前瞻事業(yè)部-鞠曉男
原文標(biāo)題:關(guān)于模擬仿真測(cè)試可信度評(píng)估方法的研究(上)——評(píng)估框架
文章出處:【微信公眾號(hào):賽目科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
-
賽目科技
+關(guān)注
關(guān)注
0文章
64瀏覽量
1984
原文標(biāo)題:關(guān)于模擬仿真測(cè)試可信度評(píng)估方法的研究(上)——評(píng)估框架
文章出處:【微信號(hào):gh_c85a8e3c0f2a,微信公眾號(hào):賽目科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
MAX15026B評(píng)估套件:性能評(píng)估與使用指南
整車輻照試驗(yàn):陽(yáng)光模擬環(huán)境艙的系統(tǒng)校準(zhǔn)方法研究

賽目科技Sim Pro工具助力國(guó)標(biāo)仿真測(cè)試流程規(guī)范落地

賽目科技Sim Pro賦能自動(dòng)駕駛算法評(píng)價(jià)體系構(gòu)建

Sim?Pro 實(shí)現(xiàn)仿真測(cè)試場(chǎng)景全量構(gòu)成

跨越“仿真到實(shí)車”的鴻溝:如何構(gòu)建端到端高置信度驗(yàn)證體系?

是德科技獲得歐盟通用標(biāo)準(zhǔn)網(wǎng)絡(luò)安全計(jì)劃認(rèn)證
【道生物聯(lián)TKB-623評(píng)估板試用】TKB-623評(píng)估板雙機(jī)通訊測(cè)試_程序開發(fā)
UPS電源—確保UPS電源穩(wěn)態(tài)測(cè)試靠譜的妙招

不確定度評(píng)估新實(shí)踐:傳感器標(biāo)定中的置信概率與誤差傳遞法則?
解鎖高品質(zhì)音頻體驗(yàn):探索音頻質(zhì)量評(píng)估與測(cè)試的科學(xué)之道
物理級(jí)傳感器仿真:破解自動(dòng)駕駛長(zhǎng)尾場(chǎng)景驗(yàn)證難題
康謀分享 | 基于多傳感器數(shù)據(jù)的自動(dòng)駕駛仿真確定性驗(yàn)證




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論