 基于自行車模型的路徑跟蹤控制算法
基于自行車模型的路徑跟蹤控制算法

2.1 基于自行車模型的路徑跟蹤控制算法
純追蹤控制是最早提出的路徑跟蹤策略之一。由于其易于實現和令人滿意的性能,已被證明是車輛控制不可或缺的工具。
在DARPA挑戰賽中,有多個團隊采用了純追蹤的控制算法[3]。
從自行車模型出發,純跟蹤算法以車后軸為切點, 車輛縱向車身為切線, 通過控制前輪轉角,使車輛可以沿著一條經過目標路點(goal
point)的圓弧行駛,如圖2-1所示。
通過正弦定理求出曲率、偏轉角與車軸之間的關系:
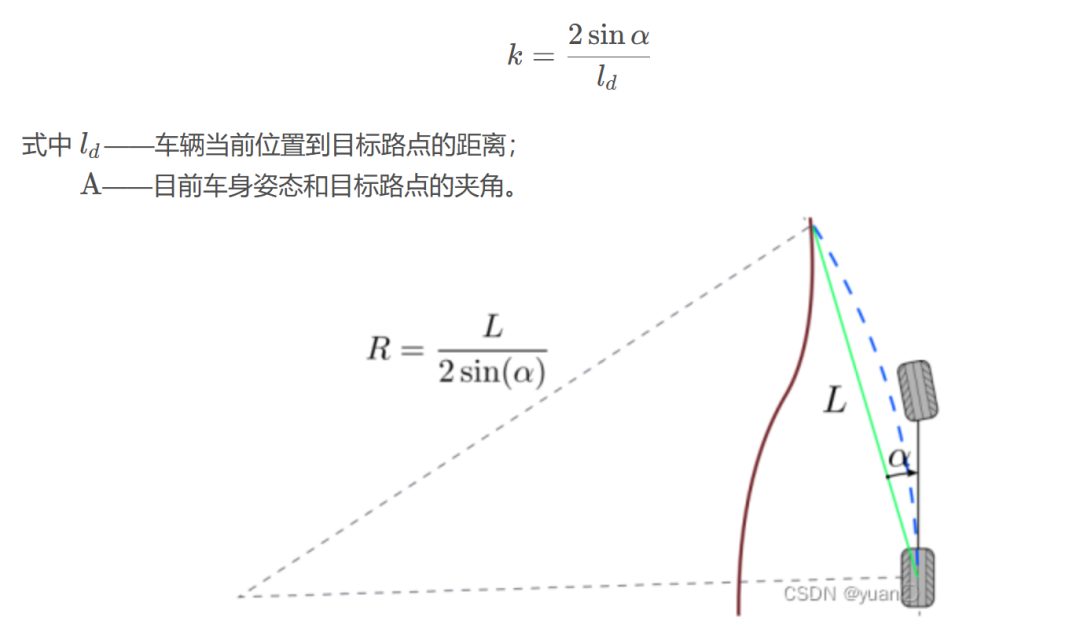
圖2-1 純追蹤控制示意圖


通常來說,會使用最大、最小前視距離來約束前視距離,越大的前視距離意味著軌跡的追蹤越平滑,小的前視距離會使得追蹤更加精確(當然也會帶來控制的震蕩),如圖2-2
所示。
駕駛員在實際駕駛過程中會觀察車輛前方一定距離范圍內的道路信息,以獲得一定的預見性,提前對車輛進行調整,從而取得良好的控制效果。
在路徑跟蹤過程中,前視距離與車速的大小有直接的關系。當車速較高時,需要較大的前視距離;當車速較低時,較小的前視距離可以達到很好的跟蹤精度。

圖2-2 前視距離對控制的影響
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
自行車
+關注
關注
0文章
115瀏覽量
25306 -
模型
+關注
關注
1文章
3752瀏覽量
52111 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179899
發布評論請先 登錄
相關推薦
熱點推薦
電動自行車控制器的技術原理解析
現代電動自行車技術的發展已使控制器遠遠超越了傳統的單一驅動控制功能,成為了電動自行車的能量管理與控制中心,這是保障電動
發表于 12-15 11:15
?3740次閱讀
純追蹤算法自行車模型
和自行車一致,前面的輪胎控制車輛的轉角軌跡追蹤目前主流的軌跡跟蹤方法有兩類,基于幾何的追蹤方法和基于模型預測的方法;純追蹤就是基于幾何追蹤的方法。下圖是一個幾何學
發表于 08-17 08:58
如何打造自動駕駛「自行車」的呢
自行車什么時候能實現「自己行走」呢?自行車屬于欠驅動系統,如果不進行控制就無法實現穩定站立最近,B站野生技術協會野生鋼鐵俠、「華為天才少年計劃」入選者、AI算法工程師稚暉君發布了一個「
發表于 08-26 09:23
電動自行車在線防盜裝置
隨著電動自行車的普及,電動自行車被盜現象屢屢發生。電動自行車所使用的電池是36V或48V的鉛酸蓄電池,十分笨重,很難搬動。因此市民一般都將自己的電動自行車停放在自家樓下,從家里引出兩根
如何自己DIY一個平衡自行車
部分介紹: 第一部分介紹自行車平衡基本物理原理; 第二部分理論篇,對平衡自行車的算法進行理論分析,包括模型分析、姿態檢測方法、PID算法,
電動自行車充電樁介紹
本款電動自行車充電樁是保障電動自行車安全快捷充電的重要
設施,適用于單位、住宅小區、商超的自行車停車棚,為電動自行
車提供充電電源。
發表于 08-11 14:34
?14次下載

??自行車平衡DIY:自行車平衡控制原理
自行車是怎么平衡的,老外做過一個非常好的視頻,這個視頻很好地證明了常見的”角動量守恒”的說法是錯誤的,并且正確的說明了自行車平衡原理是和轉向相關的,但沒有具體指出平衡和轉向的關系。
發表于 06-25 15:26
?2385次閱讀




 工商網監
工商網監
評論