 按這個步驟 STM32即可完美控制 NeoPixels
按這個步驟 STM32即可完美控制 NeoPixels

問:玩轉STM32 - 使用 STM32 來控制 NeoPixels
目前,諸如Arduino和Feather等高級開發平臺已經提供了出色的支持,可以通過易于使用的庫和普遍使用的示例代碼與NeoPixelLE?D、燈帶、矩陣等相連接。然而,更高級的平臺(例如STM32 開發板)通常缺乏相同水平的支持。因此,希望將NeoPixels整合到項目中的 開發人員需要全面了解NeoPixel通信協議以及如何克服它所帶來的挑戰。
NeoPixels
Adafruit推出的極受歡迎的可尋址全彩LED燈“NeoPixels”系列分為RGB和RGBW兩個種類。盡管二者都將紅、綠和藍色LED與驅動器芯片相集成,但RGBW組件還集成了第四個純白色的LED。可以使用類似的單線串行接口來控制這兩種類型的NeoPixel,其時間值和數據結構僅存在微小的差異。
WS2812
RGB NeoPixels實際上是WS2812智能控制LED,包括數據信號輸入引腳(DIN)和數據信號輸出引腳(DOUT)。這允許多個LED級聯并且只用一個數據線進行控制。鏈中的第一個LED負責處理從MCU接收到的前三個字節數據,然后將后續的數據簡單地轉發給DOUT引腳,該引腳可以連接到另一個LED的DIN引腳。LED將以此方式繼續向下傳遞數據,直到它們接收到復位信號為止(即,DIN線在一段時間內持續保持低電平狀態)。傳輸的字節按照圖1所示的協議進行組織。第一個字節(G7-G0)表示綠色LED的8位PWM強度,其中0x00是完全關閉,0xFF是完全打開。類似地,第二個字節(R7-R0)用于控制紅色LED的強度,第三個字節(B7-B0)用于控制藍色LED的強度。
 圖1:WS2812 LED的3字節數據協議的結構這些24位數據都是通過改變方波的脈沖寬度來進行編碼的,如圖2所示。請注意,無論發送代碼0還是代碼1,方波的周期仍保持在1.25μs。對于WS2812,使數據線保持低電平至少50μs即可生成復位信號。另請注意,圖2中顯示的計時值具有±0.15μs的公差。
圖1:WS2812 LED的3字節數據協議的結構這些24位數據都是通過改變方波的脈沖寬度來進行編碼的,如圖2所示。請注意,無論發送代碼0還是代碼1,方波的周期仍保持在1.25μs。對于WS2812,使數據線保持低電平至少50μs即可生成復位信號。另請注意,圖2中顯示的計時值具有±0.15μs的公差。
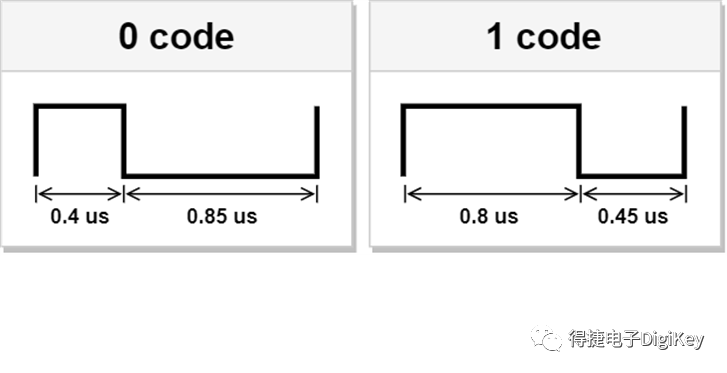
圖2:WS2812 LED的0和1位的計時圖
一種截然不同的組件,NeoPixels的RGBW種類實際上是SK6812智能控制LED,采用與WS2812 LED相同的運作原理。然而,由于它們包含第四個LED,因此實施了圖3所示的4字節數據協議。與圖1相比,唯一的區別在于數據的串聯字節(W7-W0),該字節指定了白色LED的8位PWM強度。
 圖3:SK6812 LED的4字節數據協議的結構。圖4展示了SK6812控制信號的時間值,同樣與WS2812略有差別(不過仍在±0.15μs的公差范圍內)。請注意,這兩種代碼的方波周期均保持不變,都為1.2μs。此外,SK6812的復位信號長度為80μs,而非50μs。
圖3:SK6812 LED的4字節數據協議的結構。圖4展示了SK6812控制信號的時間值,同樣與WS2812略有差別(不過仍在±0.15μs的公差范圍內)。請注意,這兩種代碼的方波周期均保持不變,都為1.2μs。此外,SK6812的復位信號長度為80μs,而非50μs。
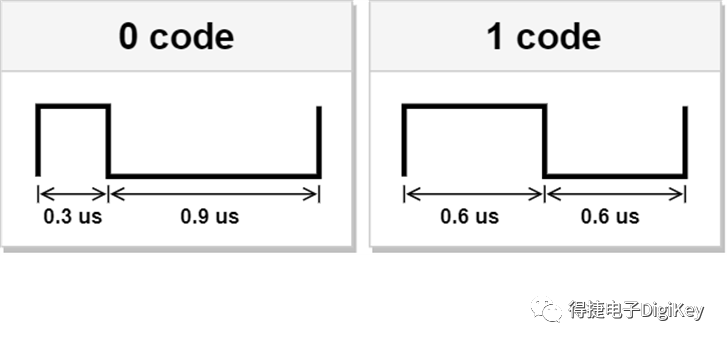 圖4:SK6812 LED的0位和1位的計時圖。
圖4:SK6812 LED的0位和1位的計時圖。
步驟
由于NeoPixel的控制信號對計時要求非常嚴格,因此除非使用匯編語言,否則無法通過簡單的比特帶寬方法產生此信號。雖然還有許多其他方法可以利用各種MCU外設、外部硬件或其組合來生成該信號,但其中最直接的方法是配置MCU定時器來生成PWM輸出信號。這是因為,如上一部分中所述,NeoPixel控制信號只是一種固定頻率的PWM信號,采用不同的占空比表示0位和1位。為了以與傳輸協議相同的速率高效地在這兩個占空比之間進行切換,還必須配置DMA流來管理更新。盡管這種方法可能是內存效率最低的方式,但它易于理解、CPU高效并且易于實施(得益于STM32Cube環境)。以下應用程式利用STM32CubeIDE(版本1.8.0)、NUCLEO-F401RE開發板和RGBW5x8 NeoPixel Shield實現上述的方法。不過,這些步驟可以輕松地推廣到任何STM32MCU/板和NeoPixel產品上。假定我們已經創建了一個STM32CubeIDE項目。如需使用其他IDE,你可以改為使用獨立的STM32CubeMX代碼配置器工具,將項目導出到所需的開發平臺上。
1.配置PWMa. 先打開STM32CubeMX配置.ioc文件(如果還未打開的話)。隨后,STM32CubeIDE將切換到*器件配置工具(*Device Configuration Tool)視圖,供你配置MCU。
b. 將定時器通道備用功能分配給選定的GPIO引腳,以與NeoPixel進行連接。所選定時器通道應該能夠生成PWM輸出。圖5顯示了我的項目中的相關部分,我選擇了引腳PB10,并將它分配給定時器2、通道3(TIM2_CH3)功能。
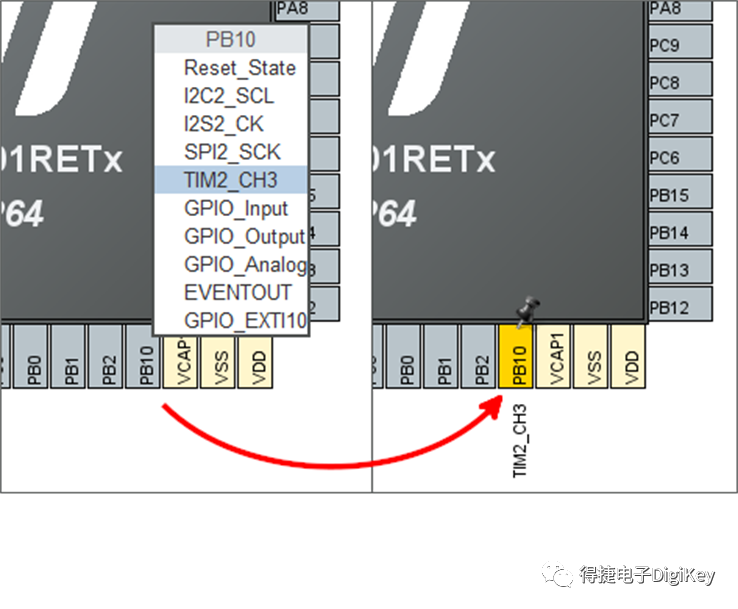 圖5:將連接到DIN的GPIO引腳配置為定時器通道c. 從左側的組件列表中選擇上一步中確定的定時器外設,以打開模式和配置(*Mode andConfiguration)面板。在模式(*Mode)面板中,選擇“內部時鐘”作為時鐘源,并從適當的定時器通道的下拉列表中選擇“PWM生成CHx”。在圖6中,定時器2、通道3已設為“PWM生成CH3”模式,因為我在上一步中選擇了TIM2_CH3備用功能。請注意,在完成此步驟后,關聯的GPIO引腳應在引腳排列視圖中從黃色變為綠色。
圖5:將連接到DIN的GPIO引腳配置為定時器通道c. 從左側的組件列表中選擇上一步中確定的定時器外設,以打開模式和配置(*Mode andConfiguration)面板。在模式(*Mode)面板中,選擇“內部時鐘”作為時鐘源,并從適當的定時器通道的下拉列表中選擇“PWM生成CHx”。在圖6中,定時器2、通道3已設為“PWM生成CH3”模式,因為我在上一步中選擇了TIM2_CH3備用功能。請注意,在完成此步驟后,關聯的GPIO引腳應在引腳排列視圖中從黃色變為綠色。
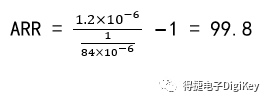
d. 在定時器的*配置(*Configuration)面板中,驗證“預分頻器”和“脈沖”值是否都設置為0。計數器周期,即自動重載寄存器(ARR),需要進行設置以得到所需的PWM周期(如果使用RGB WS2812 LED,則為1.25μs;如果使用RGBW SK6812 LED,則為1.2μs)。這將取決于定時器外設輸入的速率。只需將所需的PWM周期除以時鐘周期,并減去1即可得到此值(減去1是因為定數器從0開始)。就我的器件而言,該公式得出的ARR值為99.8,我將其四舍五入為100(圖6)。請參見下文,了解有關計算理想ARR值的詳細說明。
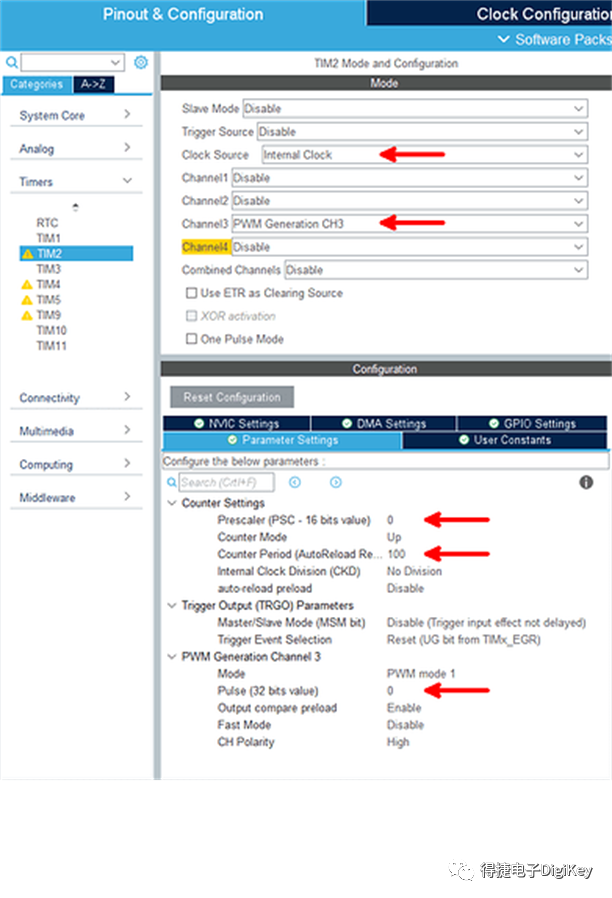 圖6:將所選定時器通道配置為PWM輸出計算ARR值
圖6:將所選定時器通道配置為PWM輸出計算ARR值
假設定時器“預分頻器”值設為0,可以很容易的計算出ARR值
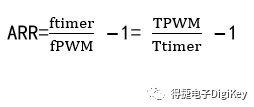 具體來說,ARR值等于PWM信號周期除以定時器外設的時鐘信號周期。我們知道,根據使用的NeoPixel類型不同,TPWM可以是1.25μs或1.2μs(例如本例中,TPWM=1.2μs)。要確定Ttimer,你需要查閱器件的規格書,確定定時器外設連接到哪個總線。規格書可以在ST的網站上找到或STM32CubeIDE會隨附提供:選擇幫助>目標器件文檔和資源(Help>TargetDevice Docs and Resources)。然后,在MCU選項卡下選擇規格書,如圖7所示。
具體來說,ARR值等于PWM信號周期除以定時器外設的時鐘信號周期。我們知道,根據使用的NeoPixel類型不同,TPWM可以是1.25μs或1.2μs(例如本例中,TPWM=1.2μs)。要確定Ttimer,你需要查閱器件的規格書,確定定時器外設連接到哪個總線。規格書可以在ST的網站上找到或STM32CubeIDE會隨附提供:選擇幫助>目標器件文檔和資源(Help>TargetDevice Docs and Resources)。然后,在MCU選項卡下選擇規格書,如圖7所示。
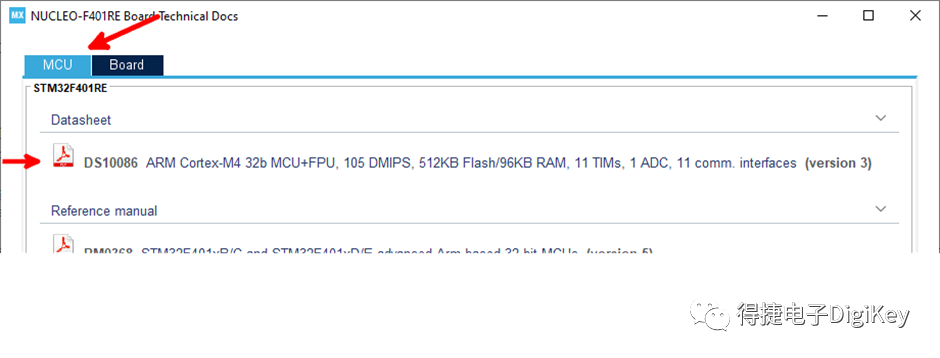 圖7:查找器件規格書
圖7:查找器件規格書
在我使用的MCU(STM32F401RE)規格書中,器件框圖中顯示我的定時器(TIM2)已連接到APB1(見圖8)。
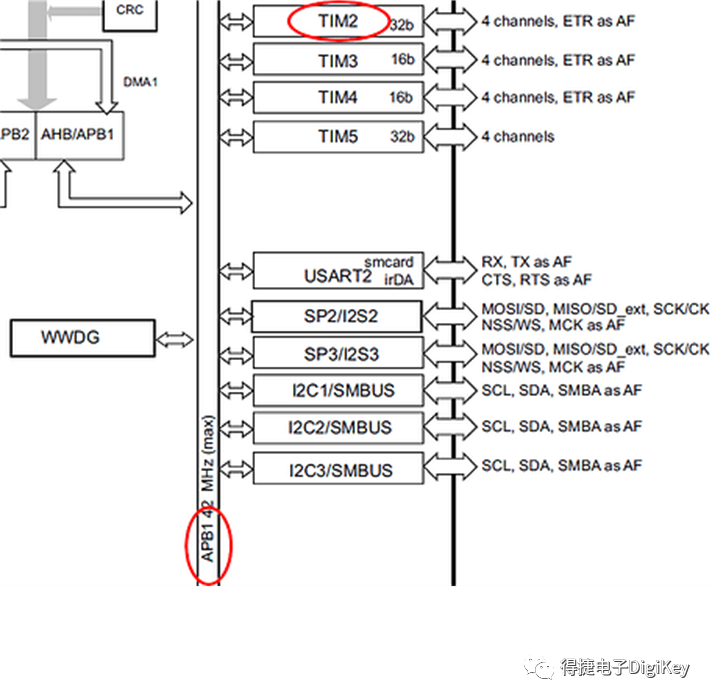 圖8:STM32F401xD/xE的部分框圖(源自DS10086)
圖8:STM32F401xD/xE的部分框圖(源自DS10086)
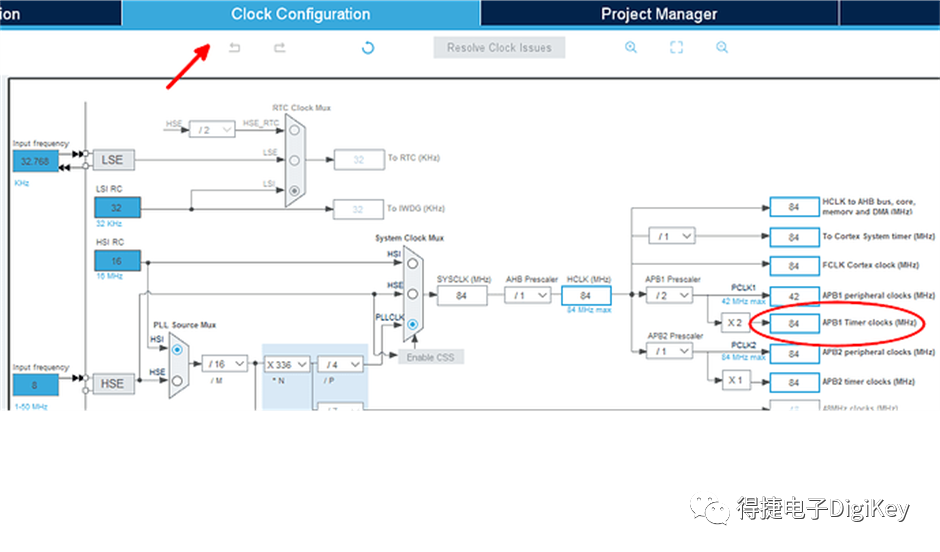
圖9介紹了:通過切換到STM32CubeIDE中的*時鐘配置(*Clock Configuration)選項卡,我們可以發現TIM2的時鐘頻率為84MHz
因此,
 為了使PWM周期盡可能接近NeoPixel控制信號的周期,我們四舍五入至最接近的整數并得到ARR=100。2.配置DMA
為了使PWM周期盡可能接近NeoPixel控制信號的周期,我們四舍五入至最接近的整數并得到ARR=100。2.配置DMA
a. 從組件列表中選擇DMA外設。
b. 在配置(Configuration)面板的DMA1選項卡下,點擊添加(Add)按鈕。在下拉菜單中,選擇你的定時器/通道組合。在我的項目中,我選擇了“TIM2_CH3/UP”。
c. 針對該新的DMA請求,將方向改為“內存到外設”。
d. 同時,將優先級改為“非常高”。
e. 驗證默認的DMA請求設置是否與圖10中顯示的相匹配。
f. 保存.ioc文件,以生成項目代碼。
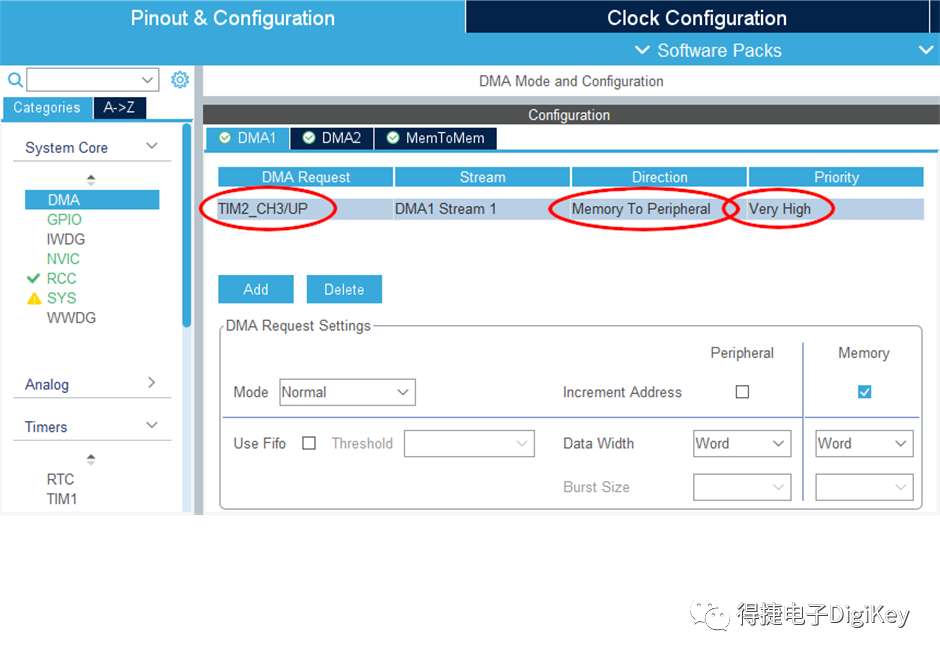 圖10:配置DMA流,以便有效更新PWM信號的占空比
圖10:配置DMA流,以便有效更新PWM信號的占空比
3.編寫代碼
在main.c文件中,按從上到下的順序編寫,本部分展示了一個簡單的示例應用,用于測試NeoPixel LED的全彩能力。此處提供了兩個版本的main()函數,一個用于RGB WS2818 LED,另一個用于RGBW SK6812 LED。
a. 在main.c文件的私有typedef部分,你可以創建一個新的數據類型,以便輕松訪問單個LED顏色值以及整個NeoPixel數據結構(如圖1和圖3所示)。列表1提供了RGB和RGBW NeoPixel組件的typedef。此代碼應粘貼在/* USER CODE BEGIN PTD */和/* USER CODE END PTD */注釋之間。
列表1:為RGB WS2812和RGBW SK6812 LED自定義數據類型
typedef union
{
struct
{
uint8_t b;
uint8_t r;
uint8_t g;
} color;
uint32_t data;
} PixelRGB_t;
typedef union
{
struct
{
uint8_t w;
uint8_t b;
uint8_t r;
uint8_t g;
} color;
uint32_t data;
} PixelRGBW_t;
b. 更改“脈沖”寄存器(也稱為CCRx)的值,這樣可以改變PWM波形的占空比。因此,我們必須計算適當的CCRx值,以實現使用的NeoPixels所需的代碼0和代碼1方波(無論是在圖2還是圖4中所示的那些)。對于RGBWS2812 LED,這些值計算如下:
ZERO=(ARR+1)(0.32)
ONE=(ARR+1)(0.64)
對于RGBW SK6812 LED,其計算過程稍有不同。
ZERO=(ARR+1)(0.25)
ONE=(ARR+1)(0.5)
當然,這些計算出的值應該四舍五入到最接近的整數。在main.c文件的私有定義部分,為每個值創建一個#define指令(請參見以下圖11中的示例)。
c. 除了CCRx值之外,還應在私有定義部分中定義控制的NeoPixel LED數量和DMA緩沖區大小。如圖11所示,只需將LED的數量乘以相應的NeoPixel數據結構中的位數即可(回想圖1和圖3)。還必須分配一個額外的緩沖區元素,因為最后一個CCRx值應為零(復位信號)。
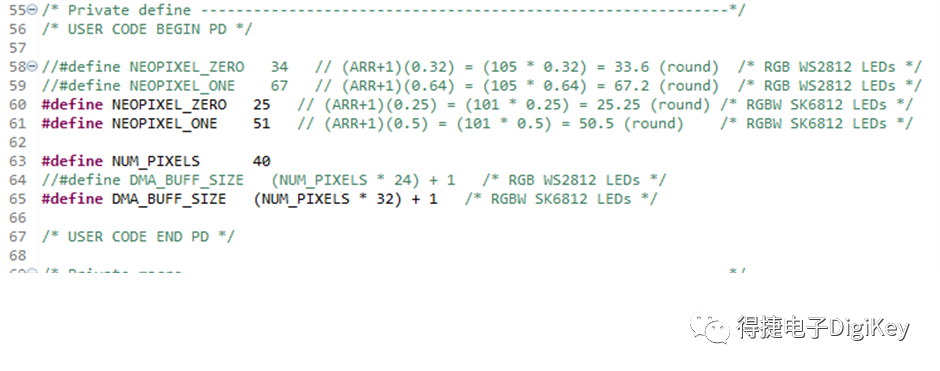 圖11:WS2812和SK6812LED的私有定義
圖11:WS2812和SK6812LED的私有定義
d. 將列表2中提供的DMA完成回調函數添加到/* USER CODE BEGIN 0/和/USER CODE END 0*/之間的私有用戶代碼部分。務必將TIM_CHANNEL_x更改為步驟1c中配置的通道。
列表2:HAL_TIM_PWM_PulseFinishedCallback()函數的實施
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
HAL_TIM_PWM_Stop_DMA(htim, TIM_CHANNEL_x);
}
e. 最后,必須將應用代碼添加到main()函數中。列表3提供了一個使用WS2812LED的示例main()函數,而列表4提供了使用SK6812 LED的類似示例main()函數。請注意,HAL_TIM_PWM_Start_DMA()函數的TIM_CHANNEL_x參數必須再次進行修改,以匹配步驟1c中配置的通道。
列表3:RGB WS2812 LED的示例main()函數
int main(void)
{
/* USER CODE BEGIN 1 */
PixelRGB_tpixel[NUM_PIXELS] = {0};
uint32_tdmaBuffer[DMA_BUFF_SIZE] = {0};
uint32_t *pBuff;
int i, j, k;
uint16_t stepSize;
/* USER CODE END 1 */
/* MCUConfiguration--------------------------------------------------------*/
/* Reset of allperipherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init*/
/* USER CODE END Init*/
/* Configure the systemclock */
SystemClock_Config();
/* USER CODE BEGINSysInit */
/* USER CODE ENDSysInit */
/* Initialize allconfigured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
MX_DMA_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGINWHILE */
k = 0;
stepSize = 4;
while (1)
{
/* USER CODE ENDWHILE */
/* USER CODE BEGIN 3*/
for (i = (NUM_PIXELS- 1); i > 0; i--)
{
pixel[i].data =pixel[i-1].data;
}
if (k < 255)
{
pixel[0].color.g =254 - k; //[254, 0]
pixel[0].color.r= k + 1; //[1, 255]
pixel[0].color.b =0;
}
else if (k < 510)
{
pixel[0].color.g =0;
pixel[0].color.r =509 - k; //[254, 0]
pixel[0].color.b =k - 254; //[1, 255]
j++;
}
else if (k < 765)
{
pixel[0].color.g =k - 509; //[1, 255];
pixel[0].color.r =0;
pixel[0].color.b =764 - k; //[254, 0]
}
k = (k + stepSize) %765;
// not so bright
pixel[0].color.g>>= 2;
pixel[0].color.r>>= 2;
pixel[0].color.b>>= 2;
pBuff = dmaBuffer;
for (i = 0; i
{
for (j = 23; j>= 0; j--)
{
if((pixel[i].data >> j) & 0x01)
{
*pBuff =NEOPIXEL_ONE;
}
else
{
*pBuff =NEOPIXEL_ZERO;
}
pBuff++;
}
}
dmaBuffer[DMA_BUFF_SIZE - 1] = 0; // last element must be 0!
HAL_TIM_PWM_Start_DMA(&htim2, TIM_CHANNEL_x, dmaBuffer,DMA_BUFF_SIZE);
HAL_Delay(10);
}
/* USER CODE END 3 */
}
列表4:RGBW SK6812 LED的示例main()函數
int main(void)
{
/* USER CODE BEGIN 1 */
PixelRGBW_tpixel[NUM_PIXELS] = {0};
uint32_tdmaBuffer[DMA_BUFF_SIZE] = {0};
uint32_t *pBuff;
int i, j, k;
uint16_t stepSize;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of allperipherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init*/
/* USER CODE END Init*/
/* Configure the systemclock */
SystemClock_Config();
/* USER CODE BEGINSysInit */
/* USER CODE ENDSysInit */
/* Initialize allconfigured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
MX_DMA_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGINWHILE */
k = 0;
stepSize = 4;
while (1)
{
/* USER CODE ENDWHILE */
/* USER CODE BEGIN 3*/
for (i = (NUM_PIXELS- 1); i > 0; i--)
{
pixel[i].data =pixel[i-1].data;
}
if (k < 255)
{
pixel[0].color.g =254 - k; //[254, 0]
pixel[0].color.r= k + 1;//[1, 255]
pixel[0].color.b =0;
pixel[0].color.w =0;
}
else if (k < 510)
{
pixel[0].color.g =0;
pixel[0].color.r =509 - k; //[254, 0]
pixel[0].color.b =k - 254; //[1, 255]
pixel[0].color.w =0;
j++;
}
else if (k < 765)
{
pixel[0].color.g =0;
pixel[0].color.r =0;
pixel[0].color.b =764 - k; //[254, 0]
pixel[0].color.w =k - 509; //[1, 255]
}
else if (k < 1020)
{
pixel[0].color.g =k - 764; //[1, 255]
pixel[0].color.r =0;
pixel[0].color.b =0;
pixel[0].color.w =1019 - k; //[254, 0]
}
k = (k + stepSize) %1020;
// 50% brightness
pixel[0].color.g>>= 2;
pixel[0].color.r>>= 2;
pixel[0].color.b>>= 2;
pixel[0].color.w>>= 2;
pBuff = dmaBuffer;
for (i = 0; i
{
for (j = 31; j>= 0; j--)
{
if((pixel[i].data >> j) & 0x01)
{
*pBuff =NEOPIXEL_ONE;
}
else
{
*pBuff =NEOPIXEL_ZERO;
}
pBuff++;
}
}
dmaBuffer[DMA_BUFF_SIZE- 1] = 0; // last element must be 0!
HAL_TIM_PWM_Start_DMA(&htim2, TIM_CHANNEL_x, dmaBuffer,DMA_BUFF_SIZE);
HAL_Delay(10);
}
/* USER CODE END 3 */
}
該項目現在應該能夠成功構建,并支持你在器件上運行代碼了。
結論
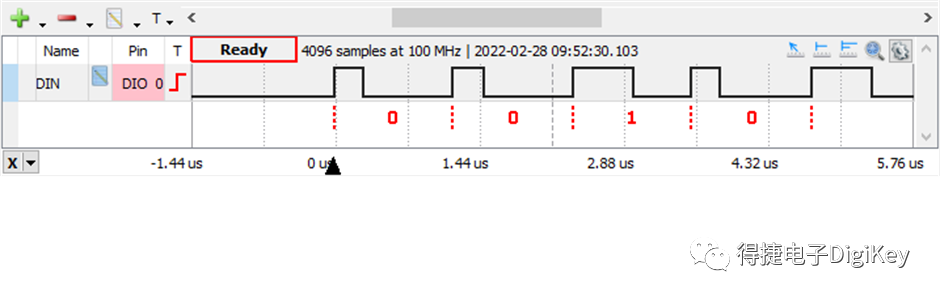
使用邏輯分析儀捕獲了上面提供的RGB和RGBW配置生成的控制信號。分別如圖12和圖13中所示。請注意,它們與圖2和圖4中指定的預期輸出相匹配。
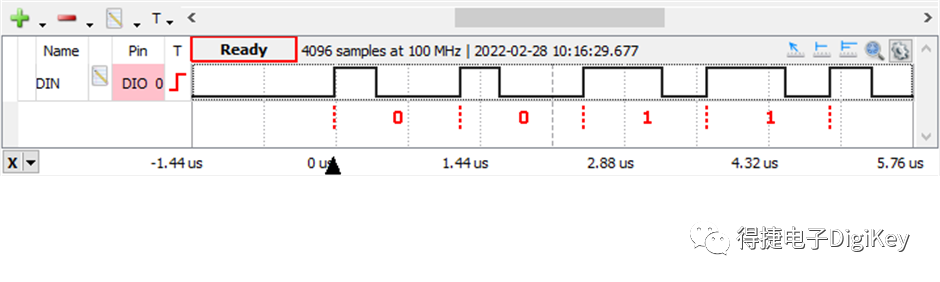
圖12:生成的WS2812控制信號(正在發送0b0011……)

-
在STM32上輕松使用printf函數
-
在STM32上輕松使用scanf
-
輕松在 STM32 系列之間進行遷移
-
利用 STM32CubeIDE 中構建分析儀
- VL53L5CXToF傳感器使用入門
?
?最后,如果你喜歡這篇文章,快分享給更多的小伙伴吧!切記點個贊哦!
提示點擊菜單設計支持:工程師錦囊,獲取更多工程師小貼士
秘技知識學不停 專屬福利享不停
就等您加入!
點此登記
賺積分、換好禮
立即到「會員權益」查看您的禮遇! 如有任何問題,歡迎聯系得捷電子DigiKey的客服團隊中國(人民幣)客服
 400-920-1199
400-920-1199 服務支持 > 聯系客服 > 微信客服
服務支持 > 聯系客服 > 微信客服 service.sh@digikey.com
service.sh@digikey.com QQ在線實時咨詢:4009201199
QQ在線實時咨詢:4009201199
中國(美金)/ 香港客服
400-882-4440
852-3104-0500china.support@digikey.com

點擊下方“閱讀原文”查看更多
讓我知道你在看喲
原文標題:按這個步驟 STM32即可完美控制 NeoPixels
文章出處:【微信公眾號:得捷電子DigiKey】歡迎添加關注!文章轉載請注明出處。
-
得捷電子
+關注
關注
1文章
255瀏覽量
14036
原文標題:按這個步驟 STM32即可完美控制 NeoPixels
文章出處:【微信號:得捷電子DigiKey,微信公眾號:得捷電子DigiKey】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
STM32L072xx系列微控制器:低功耗設計的優選之選
TMC2660C步進電機驅動IC:精密控制與高效運行的完美融合

【教程】圖文教程:詳解EWD22S-A01TR遙控器配對全步驟

ESP32-S3 工具鏈+環境配置的最終步驟清單
選擇微控制器MCU幾個步驟
?基于STM32G474的數字電源控制板設計解析與應用指南
【展會回顧】2025年MCU及嵌入式技術論壇暨第五屆電機驅動與控制技術論壇完美閉幕

在STM32F103c8上做DLQR最優控制算法的C編程資料
訓練完模型后用cls_video.py在canmvIDE上運行,按著步驟操作但是攝像頭沒有識別到是什么情況?
STM32項目分享:室內無線控制系統

STM32與機智云連接實現步驟與技巧(下篇):機智云代碼移植與優化
STM32與機智云連接實現步驟與技巧(上篇)
如何通過J-Link實現STM32H5控制調試端口



 工商網監
工商網監
評論