") RGBD相機(jī)的標(biāo)定和圖像配準(zhǔn)
RGBD相機(jī)的標(biāo)定和圖像配準(zhǔn)

1
kinect2相機(jī)簡介
1、三種主要相機(jī)類型

2、常見的RGB-D相機(jī)

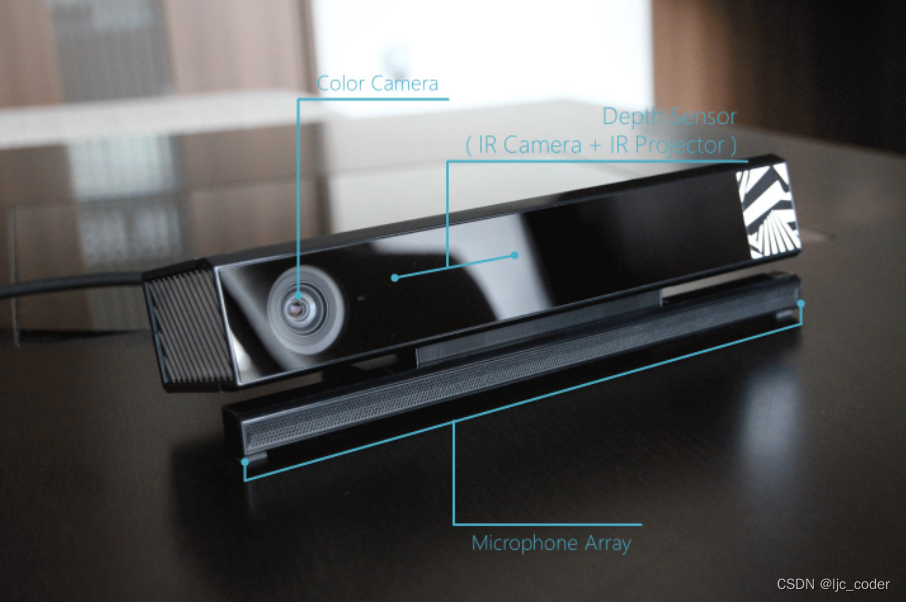
3、kinect2 相機(jī)
從左到右依次是:彩色攝像頭;紅外攝像頭(深度攝像頭),但這個要和再右邊的IR Project(紅外投射器)一起工作的;底下的長條是麥克風(fēng),可以感受到說話人的方向
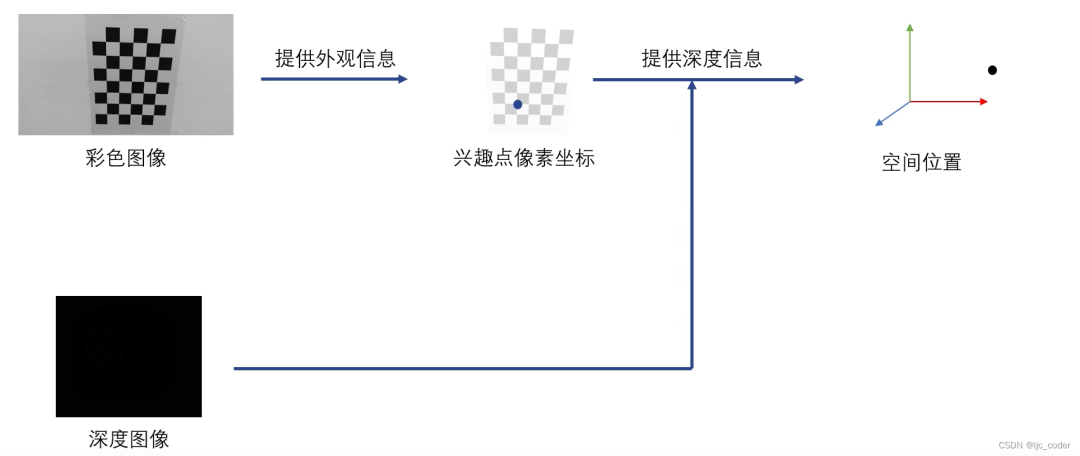
3.1使用RGB-D相機(jī)的好處
可以直接通過拍攝的深度圖得到物體的空間位置
3.2問題
keinect相機(jī) 彩色圖像是1920x1080的,但深度圖是512x414的,因此需要深度校準(zhǔn)
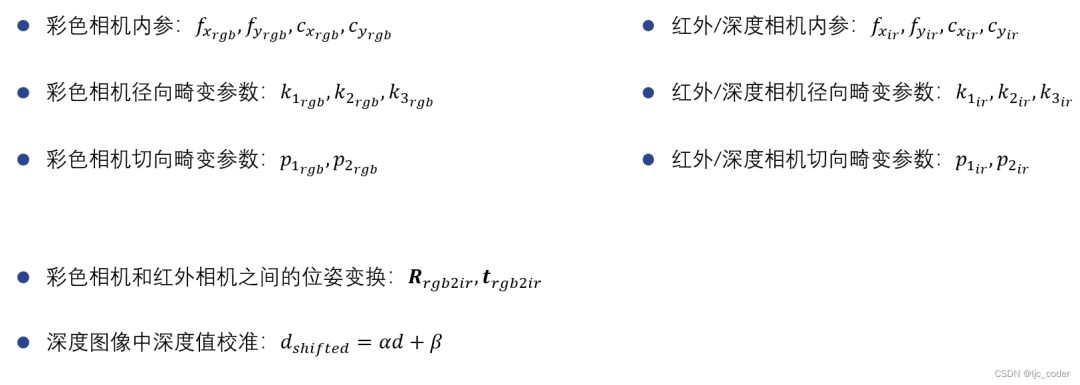
3.3實際標(biāo)定得到的數(shù)據(jù)
2
內(nèi)外參標(biāo)定
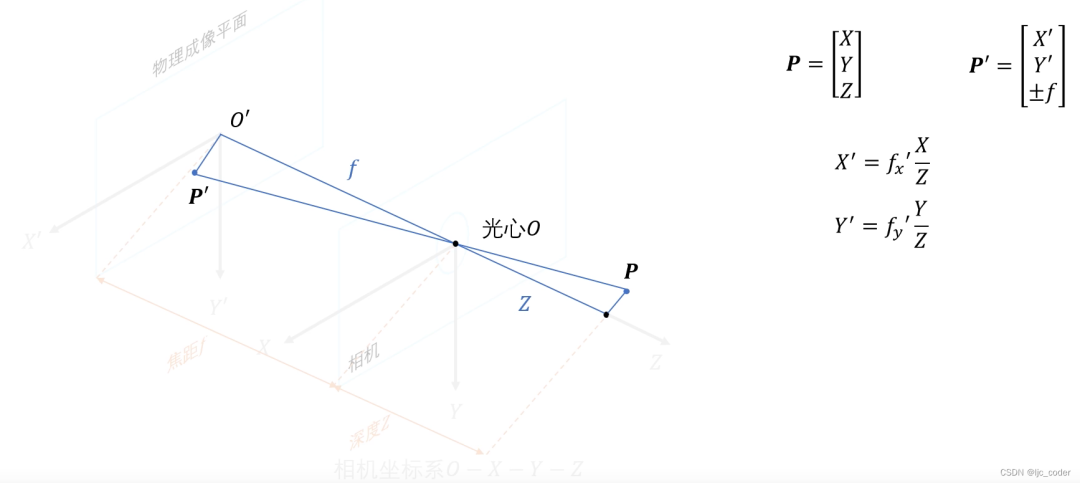
1、針孔相機(jī)投影模型
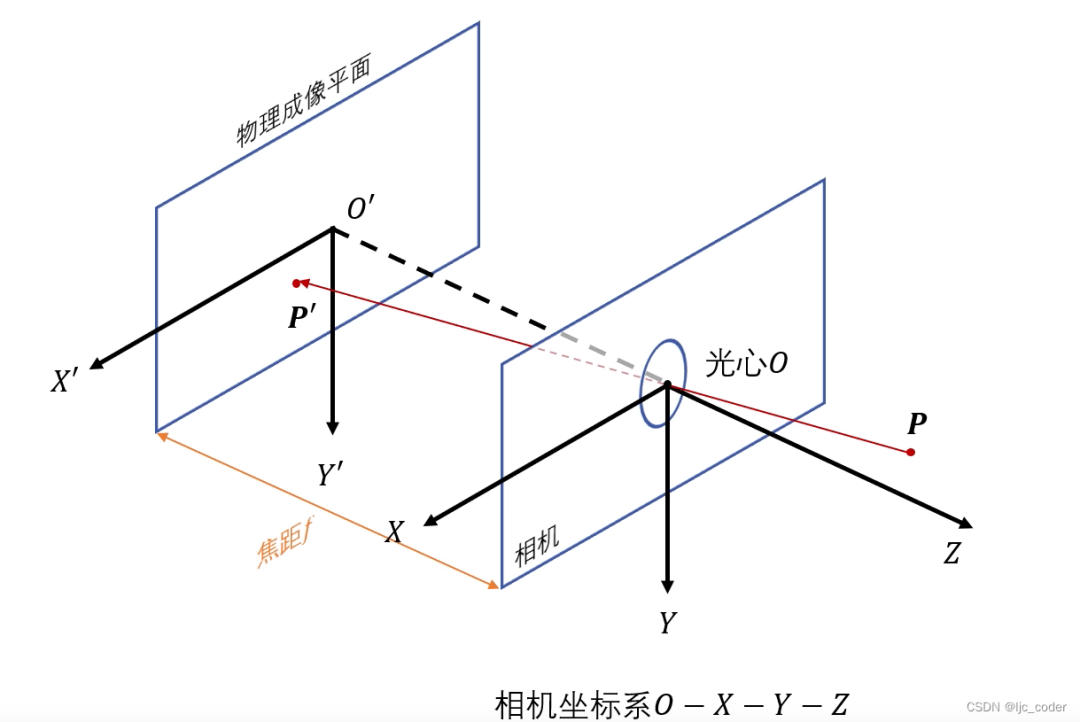
相機(jī)坐標(biāo)系 -> 物理成像平面
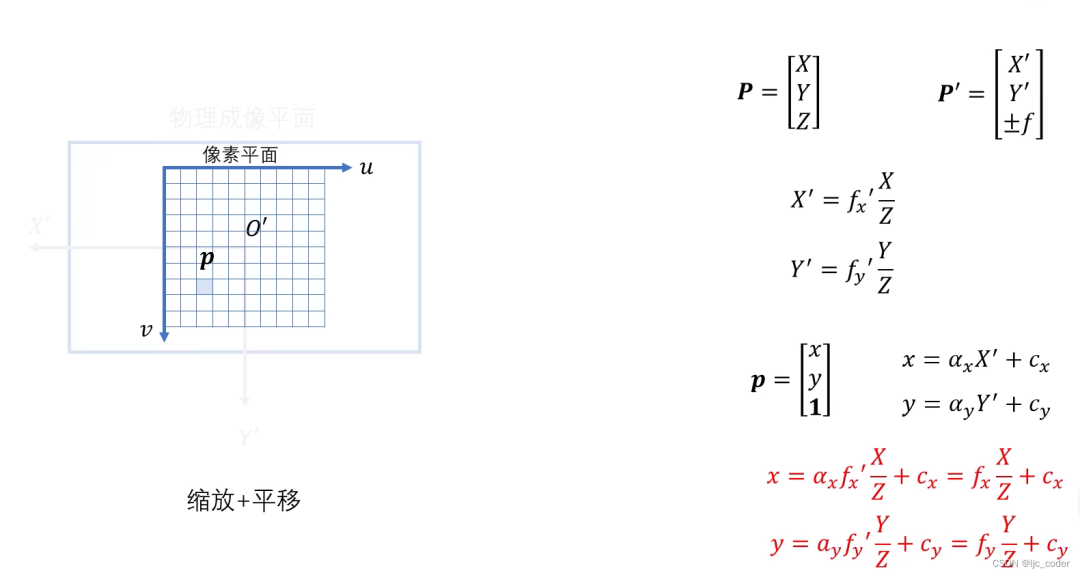
物理成像平面 -> 像素平面
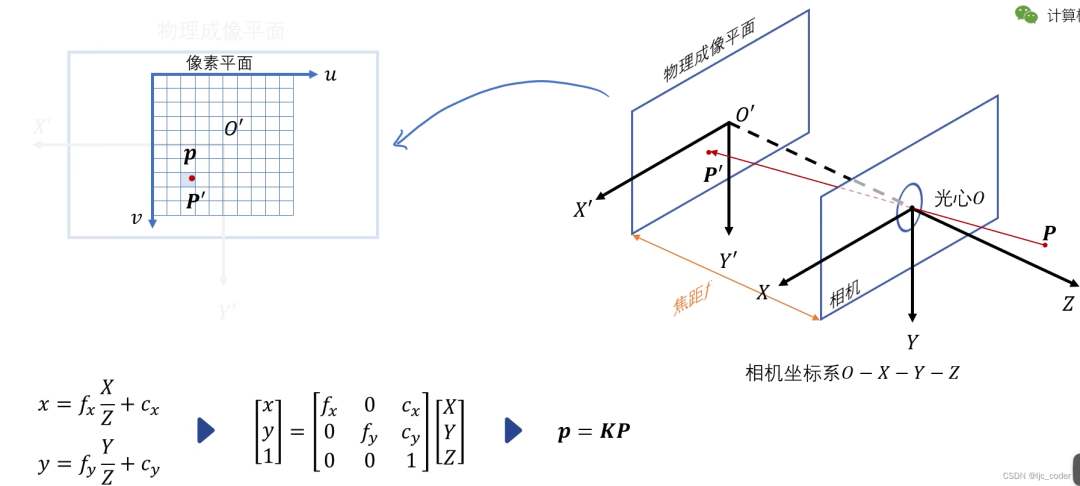
總結(jié)一下
整個投影過程都可以通過下面的內(nèi)參矩陣描述 fx,fy,cx,cy
主要通過k1,k2,k3三個參數(shù)來描述相機(jī)的徑向畸變(常用k1,k2就夠了)
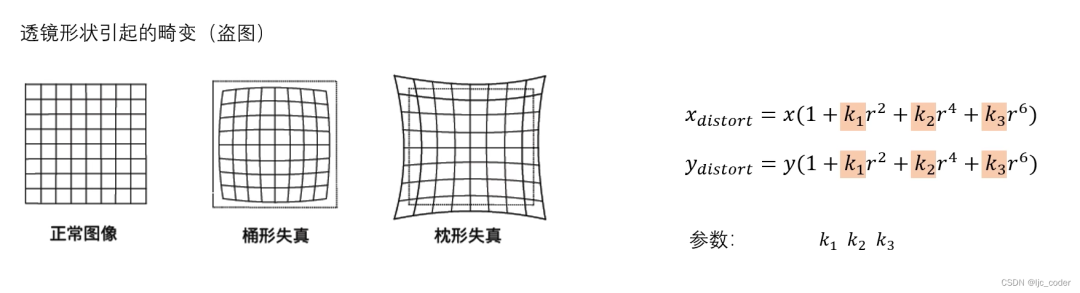
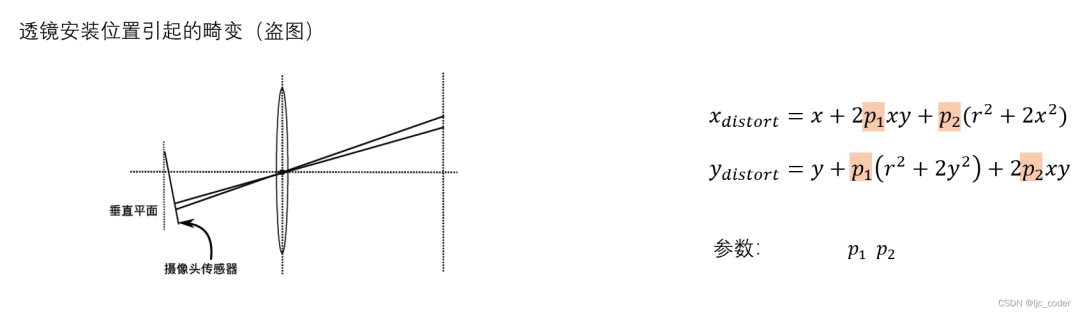
對于切向畸變,一般使用p1,p2來描述
2、工具
對于 kinect 可以用 iai_kinect2 工具包做標(biāo)定
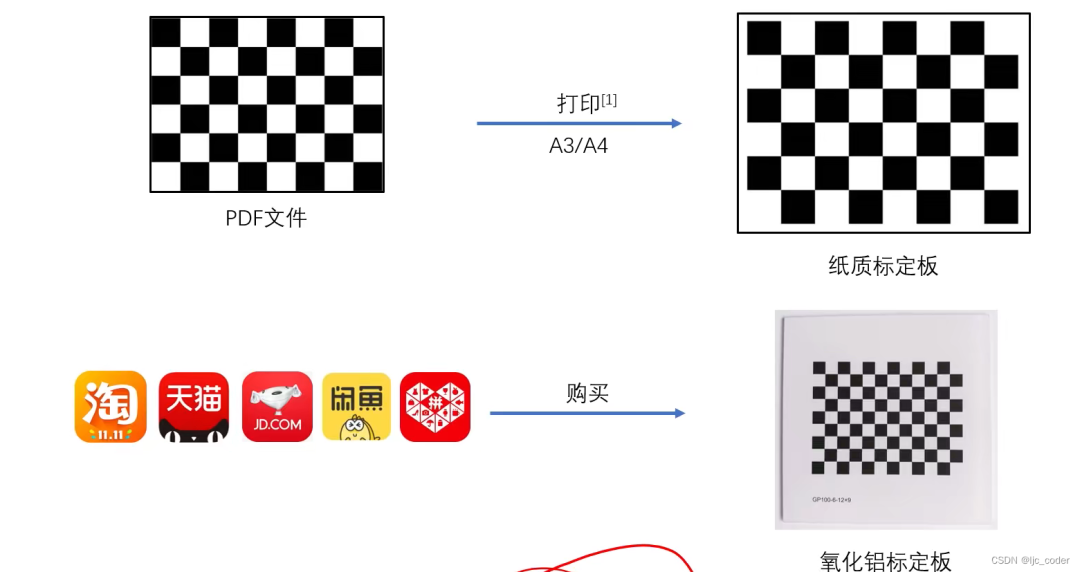
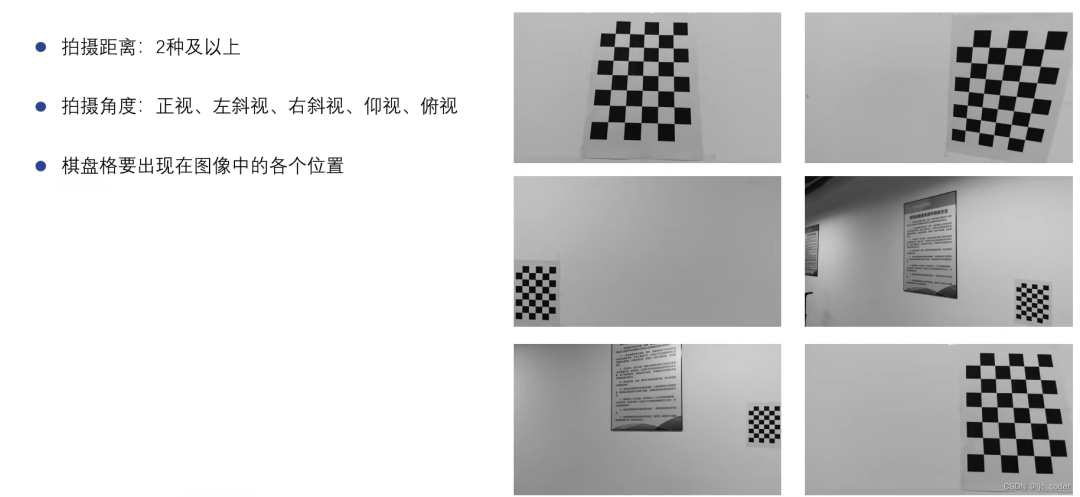
3、棋盤標(biāo)定板
4、彩色相機(jī)標(biāo)定
5、紅外相機(jī)標(biāo)定
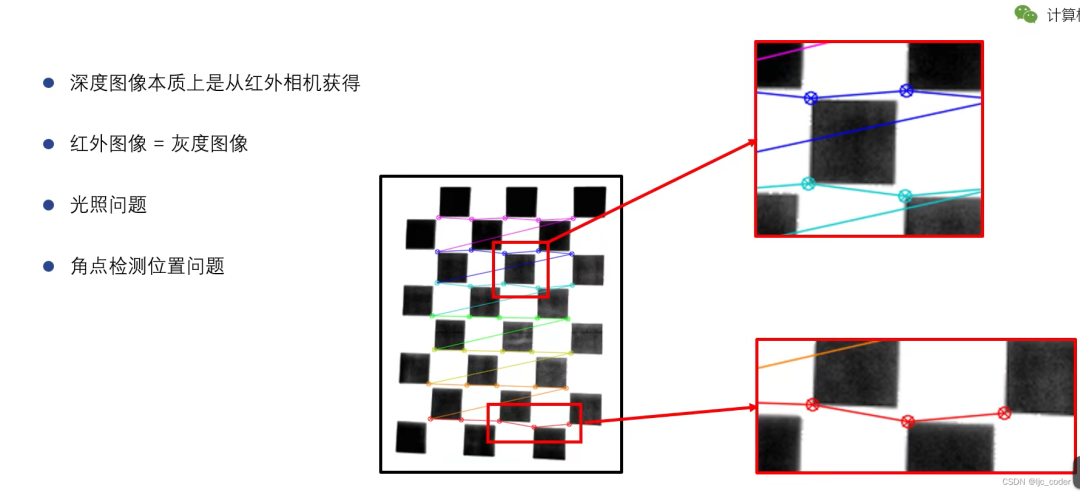
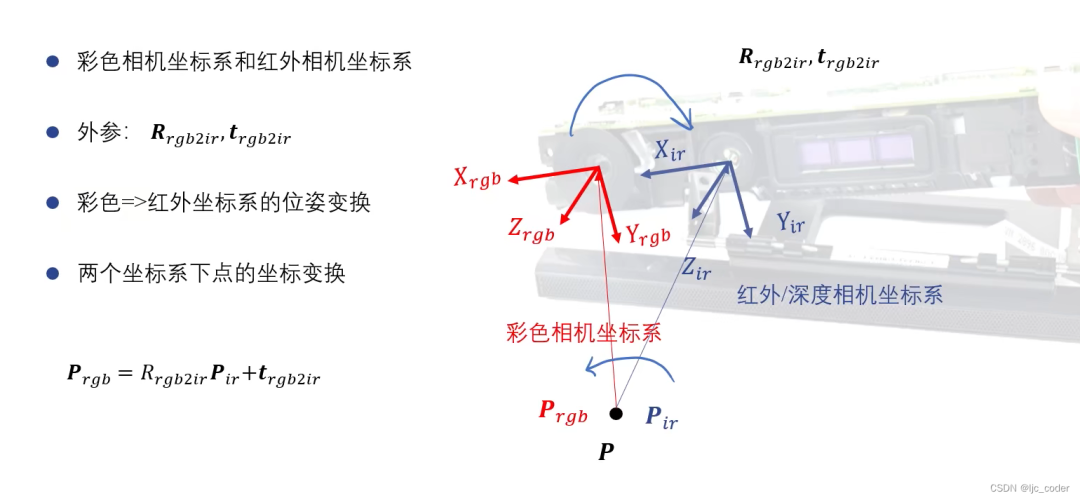
6、彩色相機(jī)和紅外相機(jī)的外參標(biāo)定
描述深度坐標(biāo)系下的點(diǎn)如何表示在RGB圖中
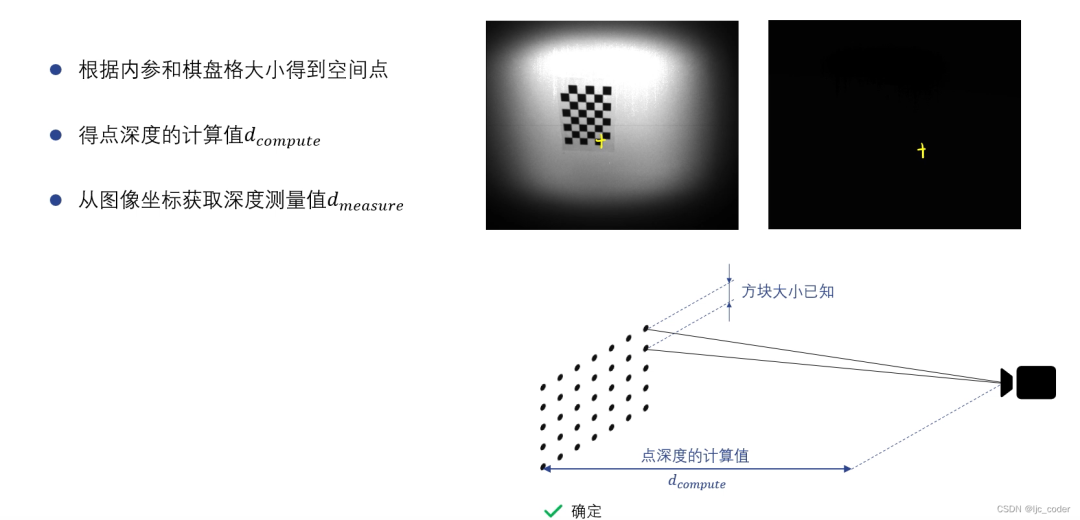
7、深度相機(jī)的深度校準(zhǔn)
3
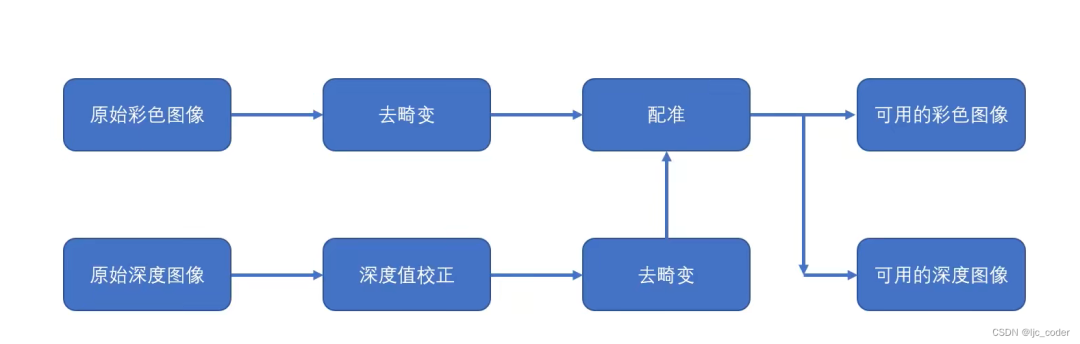
圖像配準(zhǔn)
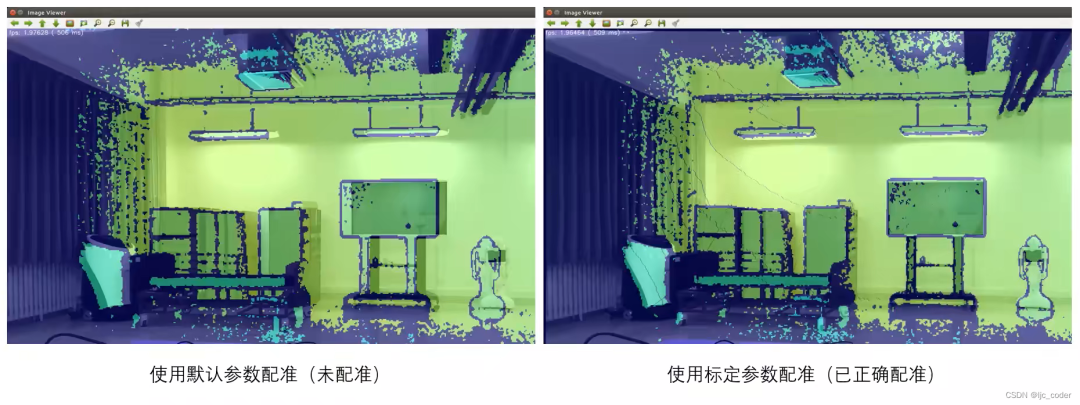
1、配準(zhǔn)原理
(配準(zhǔn)后的深度圖不對)
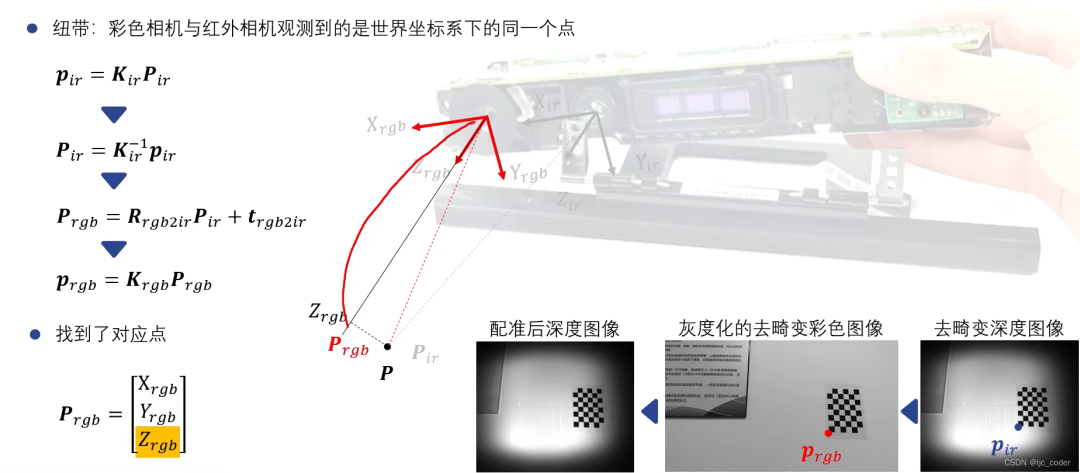
正確
4
總結(jié)
-
圖像
+關(guān)注
關(guān)注
2文章
1096瀏覽量
42406 -
相機(jī)
+關(guān)注
關(guān)注
5文章
1596瀏覽量
55974
原文標(biāo)題:RGBD相機(jī)的標(biāo)定和圖像配準(zhǔn)
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
配網(wǎng)圖像監(jiān)拍裝置:配網(wǎng)監(jiān)測的性能標(biāo)桿
工業(yè)視覺相機(jī)的應(yīng)用有哪些

黑白相機(jī)與彩色相機(jī)的成像優(yōu)勢分析以及常見的誤區(qū)說明

為什么高端相機(jī)都要配它?圖像采集卡的3大核心使命

相機(jī)高清卻數(shù)據(jù)傳不動?這篇圖像采集卡選型攻略,解決90%的工業(yè)視覺痛點(diǎn)
CANape標(biāo)定窗口被鎖無法標(biāo)定

工業(yè)CMOS相機(jī)的原理及基礎(chǔ)知識

IMU+多相機(jī)高速聯(lián)合自動標(biāo)定方案
GraniStudio:相機(jī)標(biāo)定例程

紫外工業(yè)相機(jī)的主要應(yīng)用
工業(yè)相機(jī)圖像采集卡:技術(shù)剖析、應(yīng)用場景與未來發(fā)展
工業(yè)相機(jī)的作用及未來發(fā)展

工業(yè)相機(jī)圖像采集卡:機(jī)器視覺的核心樞紐

《聊一聊ZXDoc》之汽車標(biāo)定、臺架標(biāo)定、三高標(biāo)定




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論