 LPVR-DUO:基于差分IMU的車載VR/AR的LPVR中間件
LPVR-DUO:基于差分IMU的車載VR/AR的LPVR中間件

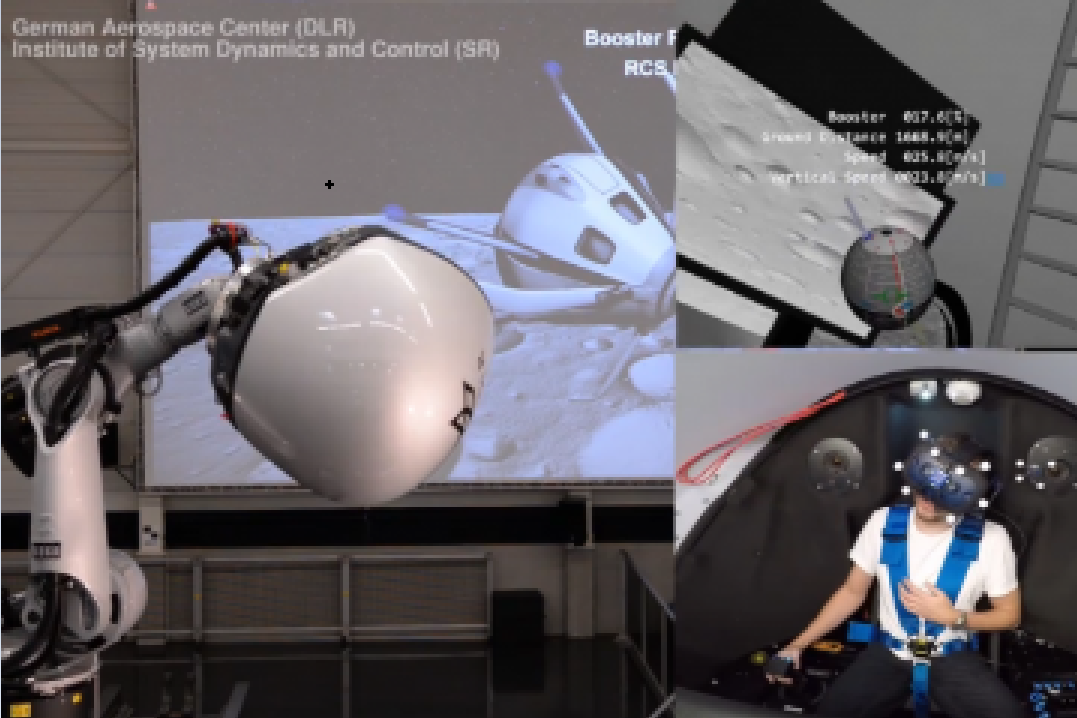
針對汽車等移動載體中高精度高實時性地捕捉VR/AR頭盔的應用難點廣州阿路比電子科技有限公司提供名為LPVR-DUO的軟件中間層,為用戶能在移動載體中使用VR/AR頭盔提供先進的技術保障。此系統允許多個光學系統和頭盔慣性測量單元(IMU),車體慣性單元的靈活組合,實現頭盔用戶相對于車體坐標系的位置和姿態的精準捕捉計算。針對不同的頭盔廠家,如Varjo,VIVE pro, Quest Pro,Pimax等,通過LPVR軟件中間層在Unreal,Unity等三維內容設計引擎中提供完美的軟件數據對接,最大程度降低內容開發者的底層硬件技術開發負擔。
★支持的頭顯設備:VIVE系列,Varjo系列,Quest系列,Pimax
★匹配的光學攝像頭系統:ART、Optitrack、VICON、其他基于VRPN 的跟蹤方案
★匹配的軟件:Unity,Unreal,Autodesk VRED,所有與SteamVR兼容的應用
★支持的手柄設備:VIVE 手柄
★移動車體的IMU:LPMS-IG1 CAN
★定位精度:1-10mm(取決于光學跟蹤設置)
★姿態精度:0.2°
★跟蹤延時:零延遲(帶有運動預測算法)
★跟蹤范圍:無限制(具體取決于光學系統參數)
★操作系統:Windows 10或以上
審核編就 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
Ar
+關注
關注
25文章
5283瀏覽量
176252 -
IMU
+關注
關注
6文章
417瀏覽量
47874 -
vr
+關注
關注
34文章
9694瀏覽量
157229
發布評論請先 登錄
相關推薦
熱點推薦
以“網關中間件”實現充電樁OCPP 1.6安全配置文件無縫升級
深圳惠志科技有限公司推出的OCPP安全代理網關采用"網關中間件"架構,在充電樁與云端CSMS之間透明地部署,實現充電樁OCPP 1.6協議安全配置文件從Profile 0/1到Profile 2/3的無縫升級,而無需觸及樁端硬件與固件。

黑芝麻智能攜手產業伙伴共建天元OS開源生態
2025中國汽車軟件大會期間,行業首個覆蓋自動駕駛全棧的開源中間件——天元OS跨域中間件正式全棧開源發布,黑芝麻智能作為共建單位出席啟動儀式。

IMU+多相機高速聯合自動標定方案
隨著視覺慣性傳感器在自動駕駛、機器人、AR/VR 等領域規模化落地,多相機+IMU 聯合標定需求呈爆發式增長,多相機+IMU 聯合標定領域尚屬空白。
感算商城聯合知名方案公司推出國
發表于 10-23 14:04
高壓差分探頭與光隔離探頭的技術比較與應用選擇??
高壓差分探頭與光隔離探頭在設計原理、隔離電壓、帶寬及精度等方面存在顯著差異,前者側重差分放大與高精度,后者采用光電隔離實現超高電壓安全測量。
差分晶振輸出的五種模式
差分晶振,也被稱為差模晶振或差分輸出晶振,是現代電子設備中常用的一種晶振結構。它通過兩個需配對的晶體振蕩器單元來產生輸出信號。
差分探頭能測那些信號呢?
差分探頭是一種專門用于測量差分信號的儀器,其核心特點是通過抑制共模信號、放大差模信號,來精準捕捉兩個信號之間的電位差。它能測量的信號類型廣泛,涵蓋多個領域,具體如下: 一、差分信號(核心測量對象
STM32U575VGT6在cubeMX中沒有FATFS中間件,是不支持嗎?
STM32U575VGT6在cubeMX中沒有FATFS中間件,是不支持?還是待開發?現在這塊板子使用FATFS只能自己手動移植嗎?
發表于 07-30 06:46
中科創達與ETAS推出預集成多域中間件解決方案
近日,ETAS 與 ThunderSoft(中科創達)宣布雙方建立了緊密合作關系,并將在今年6月24日至25日于路德維希堡舉行的汽車電子大會上,聯合展示其新開發的、面向高性能計算(HPC)SoC 車載系統的多域預集成中間件解決方案。
軟件定義汽車時代為什么中間件受青睞
在“軟件定義汽車”時代,隨著汽車軟件功能漸趨多樣化,硬件和軟件組件之間的通信和交互開始變得復雜。如今,一輛汽車可能負載百余個電子控制單元(ECU),它們分別控制著包括動力轉向、溫度控制和安全氣囊等在內的多種軟件功能。
索尼亮相2025中國上海VR/AR產業博覽會
近日,作為VR/AR行業的專業展會——2025中國上海VR/AR產業博覽會在上海盛大開啟。索尼攜旗下便攜式動作捕捉設備mocopi、空間現實顯示屏ELF-SR2等產品參與展出(展位號:
晶體晶振在AR/VR設備中的作用
在 AR/VR 的奇妙世界里,每一次精彩呈現都離不開精準頻率的技術支撐。晶體晶振,作為 AR/VR 設備的核心元件,在其中默默發揮著無可替代的關鍵作用。


STM32MP131C CbueMX中間件無RTOS選項是怎么回事?
如題,STM32MP131C CbueMX中間件無RTOS選項,對比選擇STM32MP157芯片是有的,怎么查這部分資料呢
發表于 03-14 06:59
差分探頭的缺點剖析
在電子測量領域,差分探頭是一種常用的工具,用于精確測量兩個信號之間的差值。它在許多應用中發揮著關鍵作用,然而,如同任何測量設備一樣,差分探頭也并非完美無缺,存在著一些不可忽視的缺點。



 工商網監
工商網監
評論