") 雷達(dá)測速的基礎(chǔ)知識(shí)
雷達(dá)測速的基礎(chǔ)知識(shí)

雷達(dá)能測量目標(biāo)相對(duì)于雷達(dá)的速度,它是距離的時(shí)間變化率。有時(shí)也可以用相對(duì)速度來代替距離變化率,這種情況下,速度是速度矢量的大小,通常稱為徑向速度。
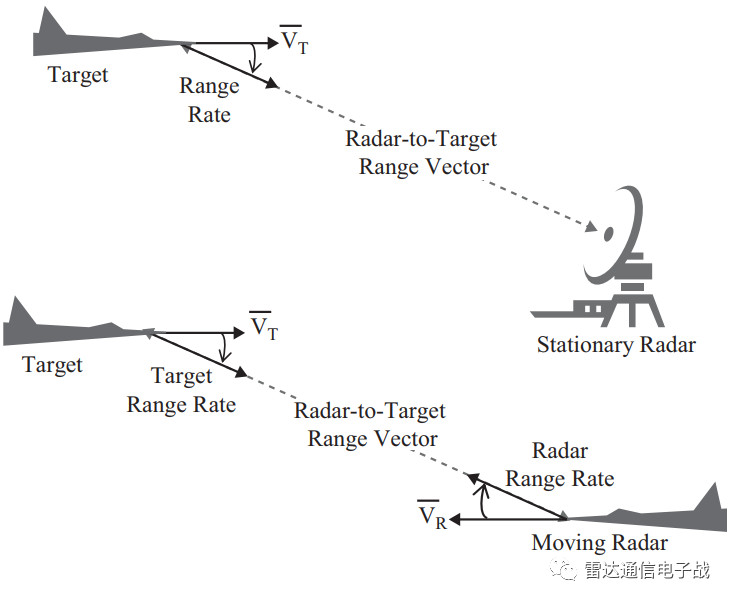
如上圖所示,若雷達(dá)系統(tǒng)也是移動(dòng)的,則在目標(biāo)與雷達(dá)的距離矢量上,速度是目標(biāo)速度矢量和雷達(dá)速度矢量的投影大小。
01脈沖多普勒頻移測速法
雷達(dá)系統(tǒng)有多種測速方法,下面簡單介紹脈沖多普勒頻移測速法。通過測量接收目標(biāo)信號(hào)的脈沖多普勒頻移,雷達(dá)系統(tǒng)能計(jì)算目標(biāo)的速度與雷達(dá)發(fā)射電磁波的相關(guān)性。
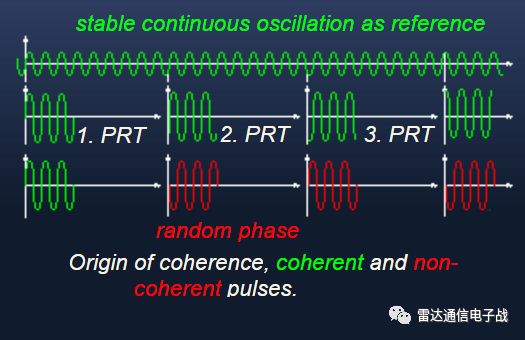
為了測量多普勒頻移,雷達(dá)系統(tǒng)利用相干的脈沖串信號(hào),通過對(duì)產(chǎn)生、發(fā)射和接收波形加入準(zhǔn)確的載波和調(diào)制處理來保證相位。
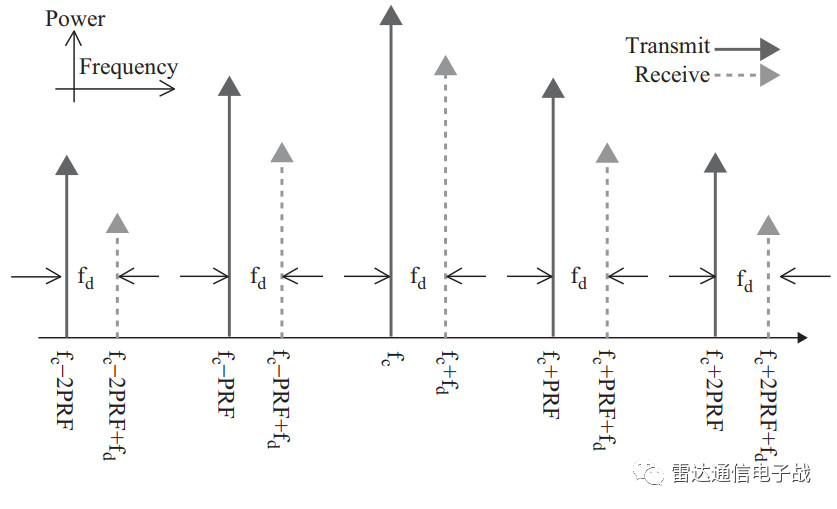
如上圖所示,運(yùn)動(dòng)目標(biāo)的回波信號(hào)的頻譜發(fā)生了多普勒移動(dòng),測量出該頻移量即可計(jì)算出目標(biāo)相對(duì)于雷達(dá)的速度。從公式中我們可以看出,接近的目標(biāo)壓縮了雷達(dá)波,從而使回波頻率變高;而遠(yuǎn)離的目標(biāo)延伸了雷達(dá)波,從而使回波頻率變低。負(fù)速度(靠近雷達(dá))造成正的多普勒頻移,而正速度(遠(yuǎn)離雷達(dá))的多普勒頻移是負(fù)數(shù)。
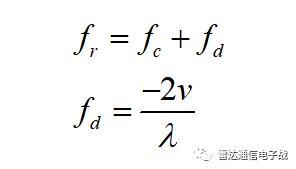
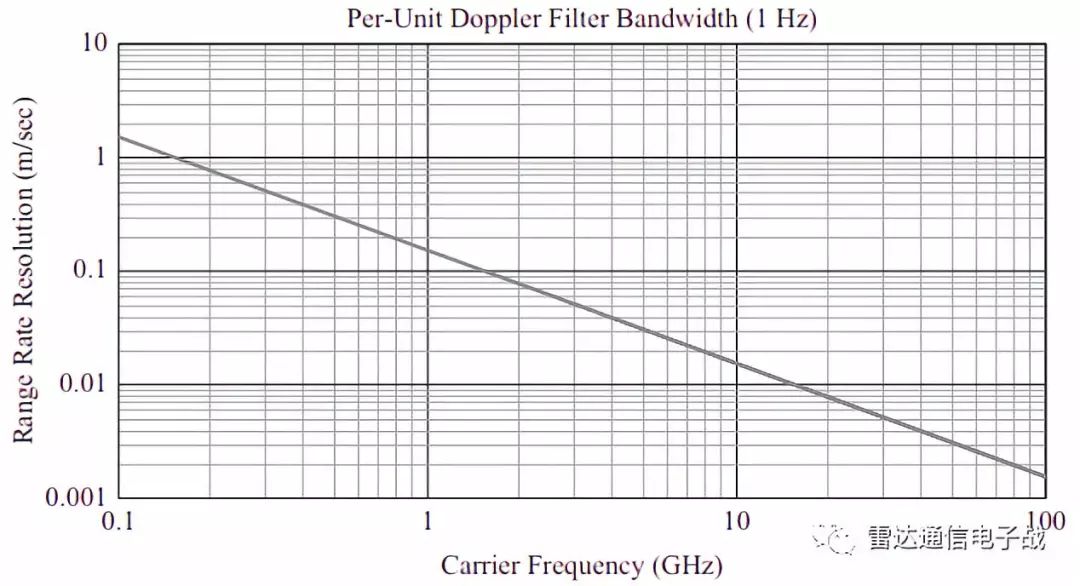
例如,目標(biāo)的速度是150m/s,雷達(dá)波長為0.03m,多普勒頻移為10kHz。速度在計(jì)算過程中取負(fù)值是因?yàn)槟繕?biāo)在朝向雷達(dá)運(yùn)動(dòng),它們之間的距離在縮短。下圖所示為雷達(dá)載波頻率函數(shù)在單位速度上的多普勒頻移。
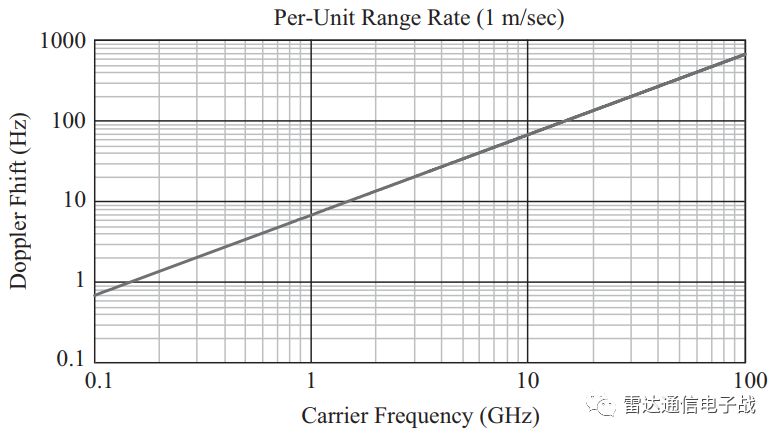
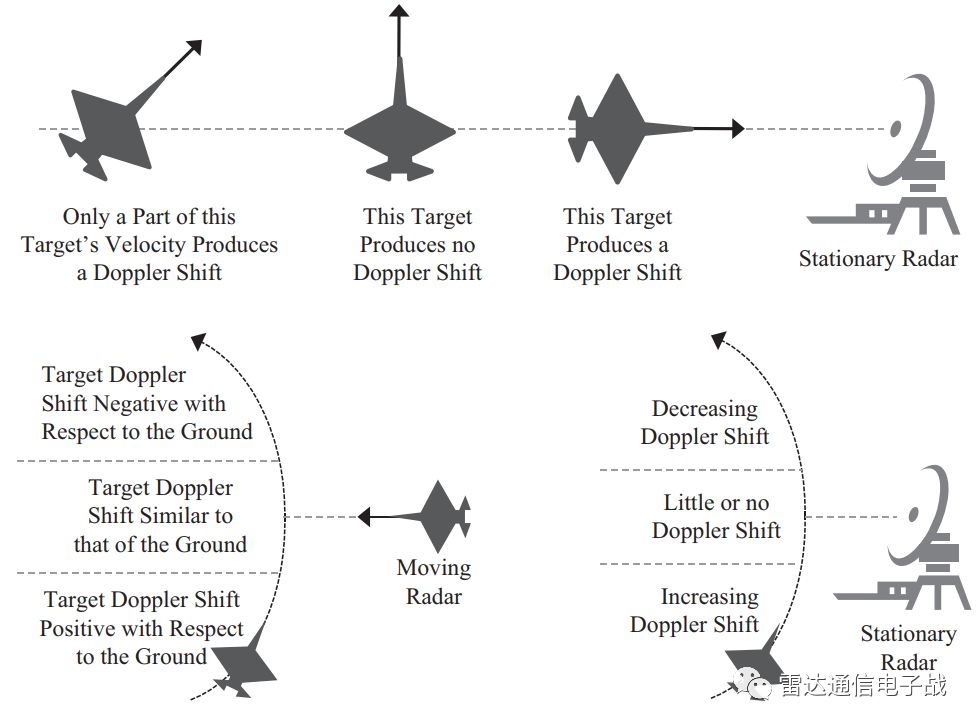
從圖中我們可以看出,雷達(dá)波頻率越高,多普勒頻移的值越大。雷達(dá)設(shè)計(jì)者不能控制目標(biāo)的速度,但可以控制雷達(dá)的頻率,這就是為什么大部分多普勒雷達(dá)都有很高的頻率,制造較大的頻移以便測量。目標(biāo)與雷達(dá)的相對(duì)幾何位置以及運(yùn)動(dòng)方向?qū)Χ嗥绽疹l移也有較大影響,如下圖所示。
02多普勒濾波器組
多普勒頻移可以利用連接的窄帶匹配濾波器進(jìn)行計(jì)算,包含目標(biāo)多普勒頻移的多普勒濾波器得到的信號(hào)具有有很高的信噪比,其他的多普勒濾波器包含的只有接收機(jī)噪聲。在閾值檢測階段,會(huì)遍歷每一個(gè)多普勒濾波器,從而得到速度的測量。
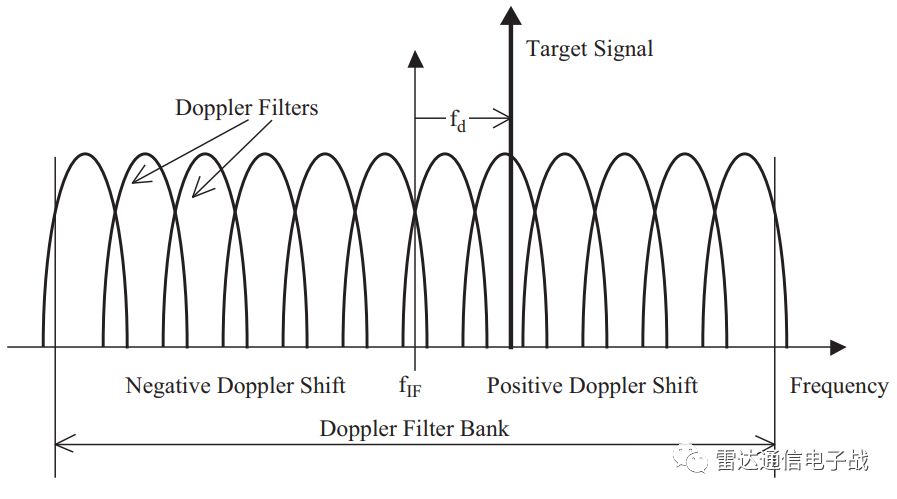
通常情況下,多普勒濾波器會(huì)重疊相鄰濾波器大約半功率的帶寬,連續(xù)相鄰的多個(gè)多普勒濾波器稱為多普勒濾波器組,它可以覆蓋目標(biāo)的整個(gè)多普勒頻移帶。對(duì)于目標(biāo)監(jiān)視雷達(dá)而言,所需要的多普勒濾波器數(shù)量會(huì)很多。
03速度分辨率
窄帶濾波器是通過對(duì)某段時(shí)間輸出信號(hào)的積分來實(shí)現(xiàn)選擇,積分時(shí)間越長,多普勒濾波器帶寬越小。這個(gè)積分時(shí)間稱為脈沖串周期或者相干處理間隔(CPI)。速度分辨率是一個(gè)關(guān)于多普勒濾波器帶寬的函數(shù)。
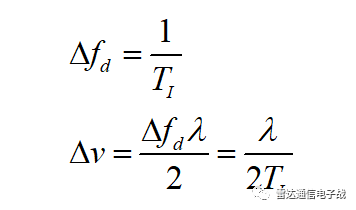
多普勒濾波器帶寬與雷達(dá)積分時(shí)間的關(guān)系。速度分辨率本質(zhì)上是基于最好的多普勒頻移,這個(gè)頻移等于多普勒濾波器帶寬。例如,多普勒濾波器的帶寬為200Hz,雷達(dá)發(fā)射信號(hào)波長為0.03m,那么,雷達(dá)的速度分辨率是3m/s。
如圖所示,每單位多普勒濾波器帶寬的速度分辨率是關(guān)于雷達(dá)載波頻率的函數(shù)。雷達(dá)載波頻率越高,對(duì)于給定相同多普勒濾波器帶寬條件下的速度分辨率越好,這也是為什么大多數(shù)多普勒雷達(dá)都是高頻的原因,脈沖串波形可以允許任何好的多普勒分辨率,并且其周期可以根據(jù)需求而改變,所以說,雷達(dá)是一個(gè)大的系統(tǒng)工程問題。
04速度模糊
脈沖串波形存在頻域模糊,雷達(dá)系統(tǒng)利用多普勒濾波器組來測量多普勒頻移,多普勒濾波器組的頻率范圍一般就是脈沖重復(fù)頻率(PRF),因此,當(dāng)多普勒頻移在±PRF/2的范圍內(nèi),就不會(huì)產(chǎn)生速度模糊。
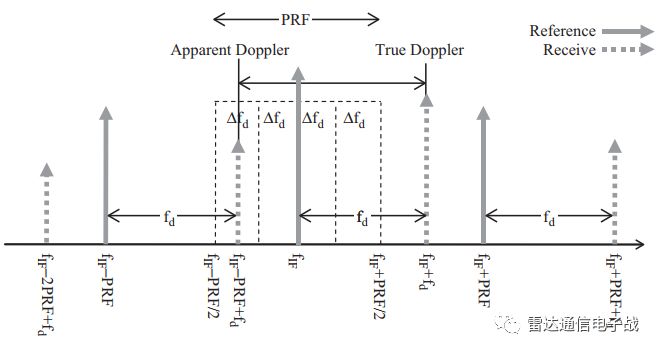
但當(dāng)多普勒頻移在±PRF/2的范圍外,通過減去一個(gè)整數(shù)倍數(shù)的PRF就可以使其出現(xiàn)在-PRF/2?+PRF/2。從頻域轉(zhuǎn)換到速度域帶來不模糊速度,與多普勒頻移為±PRF/2存在一定的關(guān)系。 一般來說,設(shè)計(jì)多PRF可以使回波在一個(gè)測量區(qū)域內(nèi)模糊,而在另一個(gè)測量區(qū)域不模糊。另外,有一些雷達(dá)系統(tǒng)通 過使用連續(xù)PRF來解決距離或速度模糊問題,即距離PRF后緊跟速度PRF,反之亦然。
05速度跟蹤
速度跟蹤作為時(shí)間的函數(shù)表示對(duì)目標(biāo)的速度進(jìn)行跟隨,即測算連續(xù)的速度變化量。“跟蹤門”可以對(duì)周圍指定速度的目標(biāo)進(jìn)行跟蹤。雷達(dá)系統(tǒng)可以通過閉環(huán)控制系統(tǒng)自動(dòng)跟蹤目標(biāo),也可以通過操作者進(jìn)行手動(dòng)跟蹤,或者兩者結(jié)合起來使用。另外,可以選擇性地對(duì)雷達(dá)系統(tǒng)多普勒濾波器組的輸出進(jìn)行監(jiān)視查看。
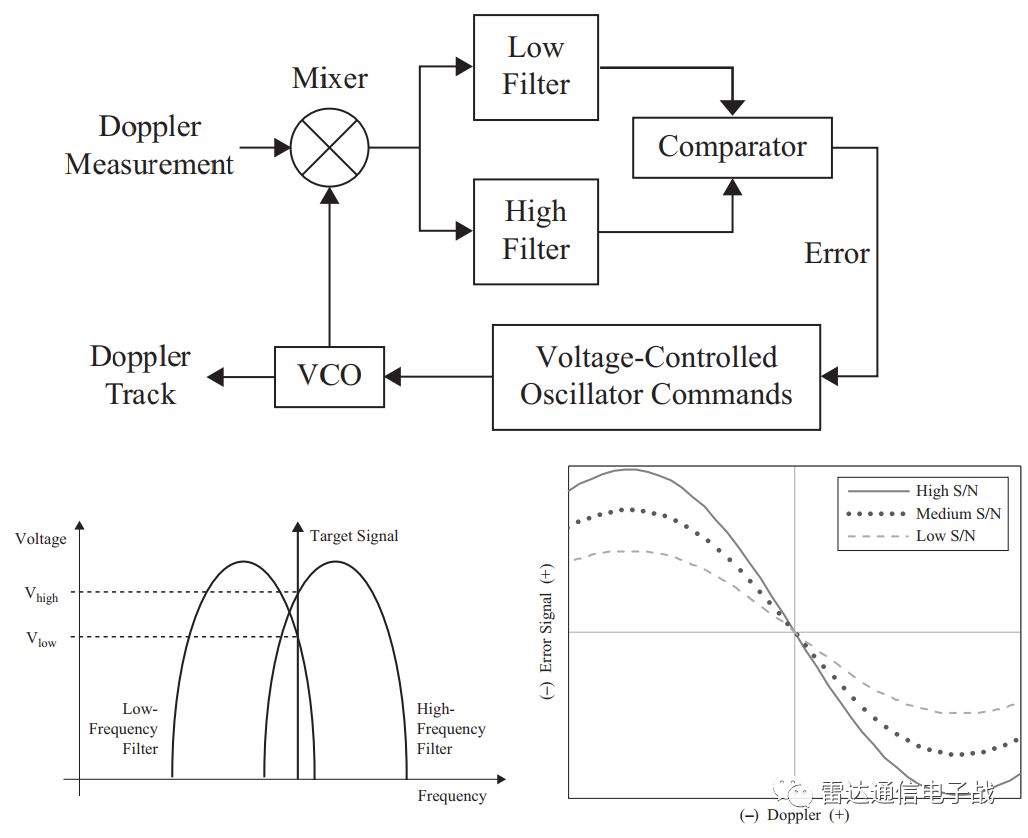
速度測量跟蹤是通過在時(shí)域上跟隨目標(biāo)的多普勒移動(dòng)來實(shí)現(xiàn)的。當(dāng)單個(gè)目標(biāo)被跟蹤時(shí),這個(gè)常用的速度跟蹤技術(shù)就是“速度門”。這個(gè)技術(shù)可以在兩個(gè)窄帶多普勒濾波器之間區(qū)分接收目標(biāo)。
審核編輯:湯梓紅
-
濾波器
+關(guān)注
關(guān)注
162文章
8412瀏覽量
185708 -
雷達(dá)
+關(guān)注
關(guān)注
52文章
3328瀏覽量
123892 -
雷達(dá)系統(tǒng)
+關(guān)注
關(guān)注
7文章
261瀏覽量
29564 -
雷達(dá)測速
+關(guān)注
關(guān)注
0文章
5瀏覽量
6636
原文標(biāo)題:雷達(dá)測速的基礎(chǔ)知識(shí)
文章出處:【微信號(hào):雷達(dá)通信電子戰(zhàn),微信公眾號(hào):雷達(dá)通信電子戰(zhàn)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
基于ARM920T內(nèi)核的24GHZ微波雷達(dá)測速儀設(shè)計(jì)與算法研究
【TL6748 DSP申請(qǐng)】基于DSP的雷達(dá)測速監(jiān)控系統(tǒng)
國產(chǎn)測速雷達(dá)和進(jìn)口比怎么樣?
基于ARM核心板AM335x設(shè)計(jì)高速公路廣域雷達(dá)測速解決方案
智慧交通廣域雷達(dá)測速儀是什么
通信基礎(chǔ)知識(shí)教程
基于DSP的車載雷達(dá)測速系統(tǒng)設(shè)計(jì)
雷達(dá)探測系統(tǒng)比較及雷達(dá)測速
電源管理基礎(chǔ)知識(shí)電源管理基礎(chǔ)知識(shí)電源管理基礎(chǔ)知識(shí)
超速行駛?cè)绾慰鄯至P款?測速雷達(dá)又是如何工作的?

測速雷達(dá)在固定、手持、移動(dòng)與車載式雷達(dá)測速抓拍系統(tǒng)中的應(yīng)用

巍泰技術(shù)智能交通高速公路定點(diǎn)式測速儀雷達(dá)與移動(dòng)測速儀雷達(dá)原理與應(yīng)用

巍泰技術(shù)卡口測速雷達(dá)解決方案



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論