 弧焊機器人焊接參數包括哪些?要怎么設置?
弧焊機器人焊接參數包括哪些?要怎么設置?

弧焊機器人焊接參數包括哪些?要怎么設置?弧焊機器人的參數設置包括焊接電流、焊接電壓、焊接速度、焊接角度等等。以下是工業機器人集成商無錫金紅鷹對這些參數的詳細介紹:
1. 焊接電流
焊接電流是弧焊過程中最重要的參數之一。它決定了弧焊機器人焊接時熔池的大小和形狀。較高的電流可以更深地穿透工件,但也會增加熱變形的風險。而較低的電流可能導致焊縫太窄,不夠強度。
2. 焊接電壓
焊接電壓是電弧接觸工件時所產生的電壓。與焊接電流一樣,弧焊機器人焊接電壓的設置也影響焊縫的尺寸和形狀。較高的電壓會產生更大的電弧,因此可以更深地穿透工件。但太高的電壓也可能導致焊縫變形或產生孔洞。
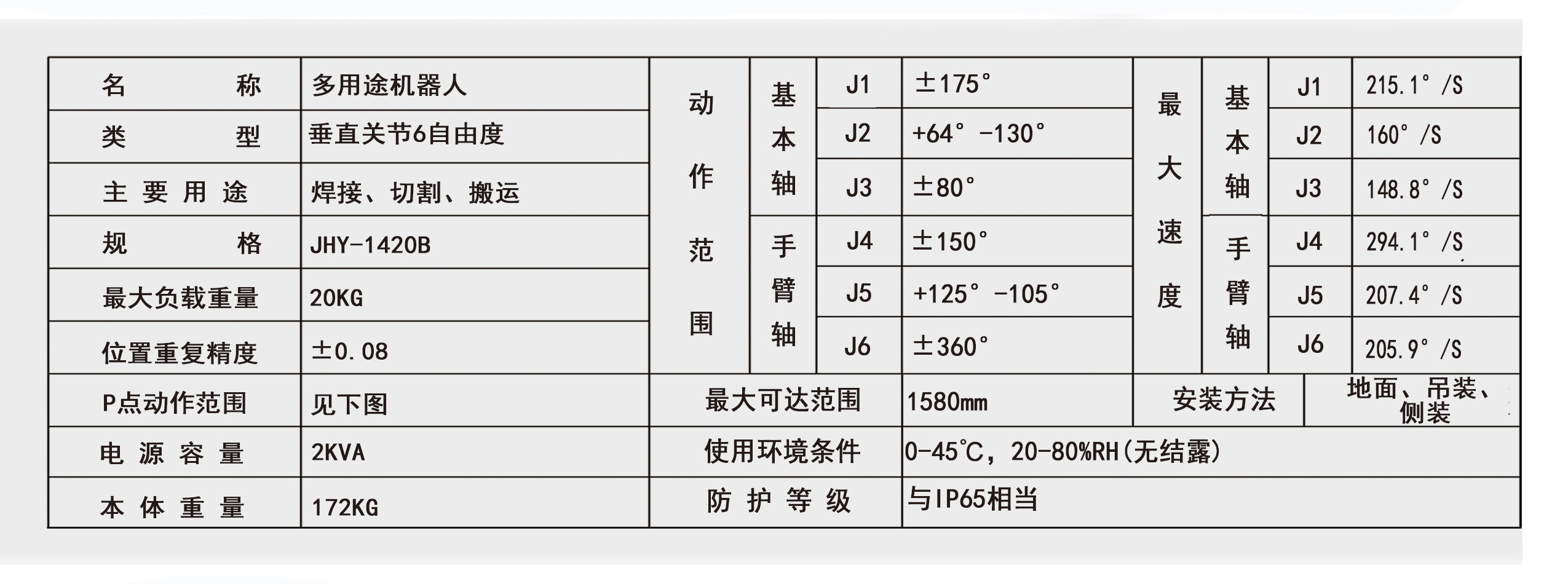
無錫金紅鷹氬弧焊機器人參數
3. 焊接速度
焊接速度是指焊槍移動的速度。弧焊機器人焊接速度的設置直接影響著焊縫的質量和耗材。過快的焊接速度可能會導致焊接時焊槍的高壓電弧沒有足夠的時間與工件接觸,導致焊縫不牢固。而過慢的焊接速度則可能會導致焊接溫度過高,使工件熱變形、變硬或產生焊瘤。
4. 焊接角度
焊接角度指焊槍和工件之間的夾角。這個參數的設置會影響到焊接時電弧的形成和穿透效果。一般來說,焊接角度應該保持在水平方向,以確保焊縫質量,避免弧焊機器人在焊接時產生過多的飛濺。
除了以上幾個參數外,無錫金紅鷹還建議大家還需要考慮如焊接材料的種類、焊接環境的溫度和濕度等因素。在選擇機器人和焊接技術時,應該根據具體情況進行相應的設置。
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
焊接
+關注
關注
38文章
3583瀏覽量
63401 -
機械手
+關注
關注
7文章
362瀏覽量
31584 -
弧焊機器人
+關注
關注
0文章
32瀏覽量
8782
發布評論請先 登錄
相關推薦
熱點推薦
EtherNet/IP轉CANopen——焊裝產線的“協議破壁人”:讓機器人聽懂焊機
EtherNet/IP轉CANopen——焊裝產線的“協議破壁人”:讓機器人聽懂焊機 在汽車焊裝車間,焊機與機器人“各說各話”——

探索RISC-V在機器人領域的潛力
探索RISC-V在機器人領域的潛力
測評人:洄溯
測評時間: 2025年11月
測評對象: MUSE Pi Pro開發板(基于進迭時空K1系列高性能RISC-V CPU)
一、 開篇引言
發表于 12-03 14:40
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
開發板的實際演示證明,RK3576能夠輕松處理三屏顯示和八路攝像頭輸入的復雜任務,同時保持低功耗和低發熱特性,為機器人應用提供了理想的性能基礎。
實測見證:RK3576輕松駕馭三屏八攝像頭復雜任務理論參數
發表于 10-29 16:41
小蘿卜機器人的故事
經過我的申請,
馬老師發放了,
小蘿卜機器人的,
開發權限,
原來的小蘿卜公司,
因為經營不善倒閉,
作為科研產品,
幾個技術對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
發表于 10-23 05:24
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
,也推動著機器人應用場景變革。昆泰芯 KTH71 系列傳感器芯片工作溫度范圍擴展至 - 40℃~125℃,讓機器人首次能在 “極寒救援模擬”“高溫焊接挑戰” 等極端項目中穩定運作,某團隊透露其高溫環境
發表于 08-26 10:02
工業機器人線束揭秘 | 性能加持助力機器人作業效率穩定躍升
近年來國家陸續出臺相關機器人的發展規劃,推進機器人產業創新。在工業、汽車制造、消費電子、新能源等眾多領域中,工業機器人的應用大幅度增加,包括核心組件工業

工業機器人的特點
的基礎,也是三者的實現終端,智能制造裝備產業包括高檔數控機床、工業機器人、自動化成套生產線、精密儀器儀表、智能傳感器、汽車自動化焊接線、柔性自動化生產線、智能農機、3D 打印機等領域。而智能制造裝備中工業
發表于 07-26 11:22
當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
在汽車焊裝車間的技術角,工程師小陳的筆記本記滿了“跨協議難題”:當搭載Profinet的庫卡機器人遇上CCLINKIE總線的三菱PLC,數據交互像隔著玻璃喊話——PLC發送的坐標指令要“繞地球半圈
發表于 06-04 14:31
明遠智睿SSD2351開發板:語音機器人領域的變革力量
在人工智能快速發展的今天,語音機器人逐漸成為人們生活和工作中的得力助手。明遠智睿SSD2351開發板憑借強大性能與豐富功能,為語音機器人的發展注入新動力,成為該領域的變革力量。 SSD2351開發板
發表于 05-28 11:36
當PLC遇上電焊機器人:EtherCAT轉CANopen上演工業級“語言翻譯官”
在汽車自動化產線中,PLC與電焊機器人的高效協同是提升生產效率的關鍵。但PLC常用的EtherCAT協議與電焊機器人采用的CANopen協議存在通信壁壘,JH-ECT009疆鴻智能EtherCAT轉
速看!發那科機器人做為profinet轉ethernetip主站參數設置,每步都關鍵
界面上進行調整。比如,調整主、從站,以及字節數和IP地址的對應。下面一起看一下機器手臂的參數如何調整。 發那科機器手臂作為主站時,不同的通信場景和從站設備參數設置會有所差異,以下以常見

盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
相機標定是視覺系統的基石,直接影響后續圖像處理的精度。書中詳細介紹了單目和雙目相機的標定流程,包括標定板的使用、參數優化以及標定文件的應用。
實際應用中,標定誤差可能導致機器人定位偏差,因此標定過程
發表于 05-03 19:41
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發
發表于 04-30 01:05
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
控制機器人沿著路徑行駛,同時實時檢測環境變化,調整路徑規劃和導航控制策略。書中提供了完整的導航系統搭建示例,包括代碼實現和參數配置,幫助讀者快速掌握導航系統的開發。
3. 案例分析與實踐
機器
發表于 04-27 11:24



 工商網監
工商網監
評論