 展會邀請|虹科誠邀您9月14-16日參加第四屆自動駕駛地圖與定位大會和第五屆自動駕駛與人機共駕論壇
展會邀請|虹科誠邀您9月14-16日參加第四屆自動駕駛地圖與定位大會和第五屆自動駕駛與人機共駕論壇

?
展會邀請
自動駕駛地圖與定位大會;
自動駕駛與人機共駕論壇
2022年
9月14-16日
2022年9月14日-16日,2022年第四屆自動駕駛地圖與定位大會和2022年第五屆自動駕駛與人機共駕論壇將在上海召開。
虹科誠邀您前來參與,屆時,我們講展示虹科在自動駕駛領域的技術產品和解決方案,期待您蒞臨參觀!
2022年第四屆自動駕駛地圖與定位
大會
展會時間
9月14日 09:00 — 18:00
地點
中國 上海長寧區上海綠地公館會議中心
展位
B23
2022年第五屆自動駕駛與人機共駕
論壇
展會時間
9月15日 09:00 — 18:00
9月16日 09:00 — 18:00
地點
中國 上海長寧區上海綠地公館會議中心
展品一覽
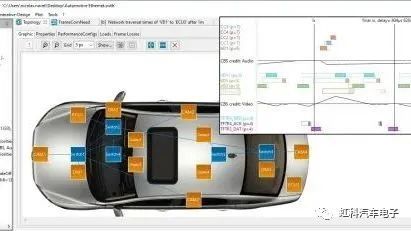
虹科汽車HIL視頻數據記錄儀

?
首先,要介紹的是這次展會虹科的爆品,使數據采集和HIL數據注入變得更加統一的汽車HIL視頻數據記錄儀。
虹科的數據記錄儀logiRECORDER可以連接到各種車輛網絡數據總線,并插入任何類型的攝像頭和ECU之間。它能夠記錄的道路或合成的注入數據回放到被測ECU中,并同時記錄ECU的響應。
虹科車輛網絡仿真解決方案
?
虹科RTaW是汽車通信網絡架構的建模、仿真、自動配置軟件,支持全開發周期的設計選擇和驗證。
展品一覽03
虹科車輛總線CAN/CAN FD /LIN測試與分析工具

?
虹科還帶來了我們的王牌產品—車輛總線工具。車輛總線接口主要是指CAN和LIN轉PC接口模塊,包括CAN/LIN轉USB, CAN/LIN 轉 RS232,CAN FD/CAN 轉 PCIe,miniPCIe等。主要有PCAN-USB PRO FD、PCAN-USB X6、PCAN M.2、Baby-LIN-RM-III等熱門型號。
END
更多產品信息
敬請屆時到虹科展位
與我們的技術工程師深入交流!
?
-
自動駕駛
+關注
關注
793文章
14883瀏覽量
179873
發布評論請先 登錄
如何構建適合自動駕駛的世界模型?

易控智駕亮相第四屆礦山智能運載和自主協同作業大會
誠邀蒞臨Arbe CES 2026展位,共探自動駕駛新未來!
邁向自動駕駛:地平線技術生態大會探索自動駕駛規模化商用路徑

小馬智行與三一重卡及東風柳汽聯合打造第四代自動駕駛卡車
自動駕駛汽車在隧道、山區如何精準定位?

自動駕駛汽車是如何準確定位的?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

泰科電子榮獲第四屆知鼎獎汽車線控底盤科技創新獎
魔視智能亮相第五屆焉知汽車年會
華為受邀出席第一屆自動駕駛產業發展論壇
邀請函 | CET中電技術邀您參加第四屆民航數智低碳發展論壇




 工商網監
工商網監
評論