 技術分享 | 使用TSMaster從零打造車輛控制器HIL實時仿真系列3-脫離RT的車輛模型的實時仿真
技術分享 | 使用TSMaster從零打造車輛控制器HIL實時仿真系列3-脫離RT的車輛模型的實時仿真

HIL實時仿真系列3
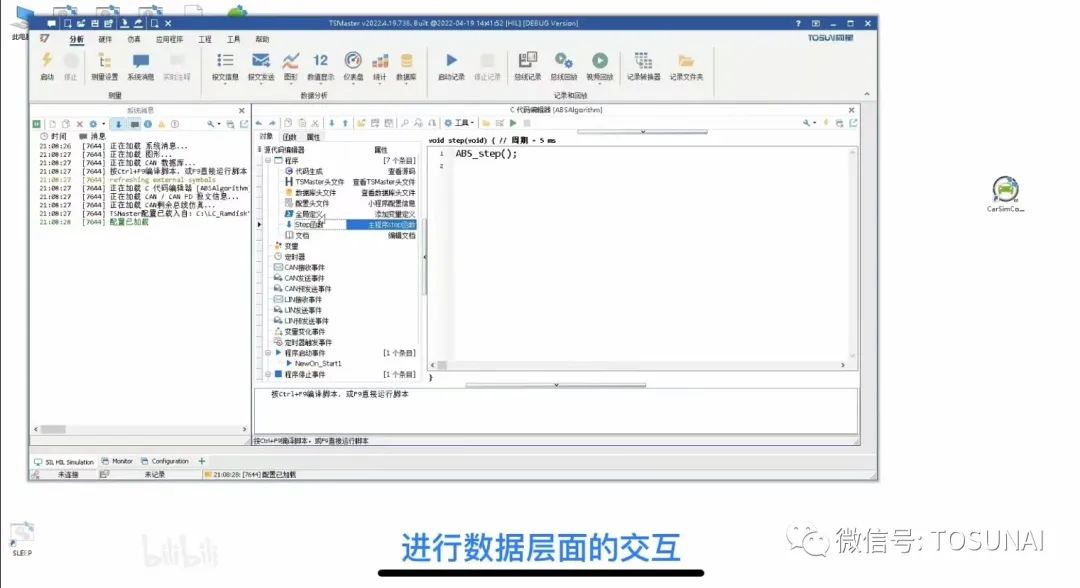
今天我們基于TSMaster HIL實時仿真系列第三章節。在上一章節我們介紹了如何自動生成ECU的嵌入式代碼,并且集成到于TSMaster的實時運行環境中。從這一章節開始,我們繼續介紹如何與我們的ECU算法進行數據層面的交互。
脫離RT的實時仿真
不論我們的ABS算法是處在TSMaster的小程序中,還是處在真實的ECU硬件中,它的運行必然都需要輸入外部環境給它提供的輪速等信號,它的輸出也必然要施加到外部的環境中,這里的外部環境就是指整車以及其他的控制器。很明顯,我們需要一個整車模型來參與仿真的過程,通常意義上,這個整車模型就是CarSim的RT版本。
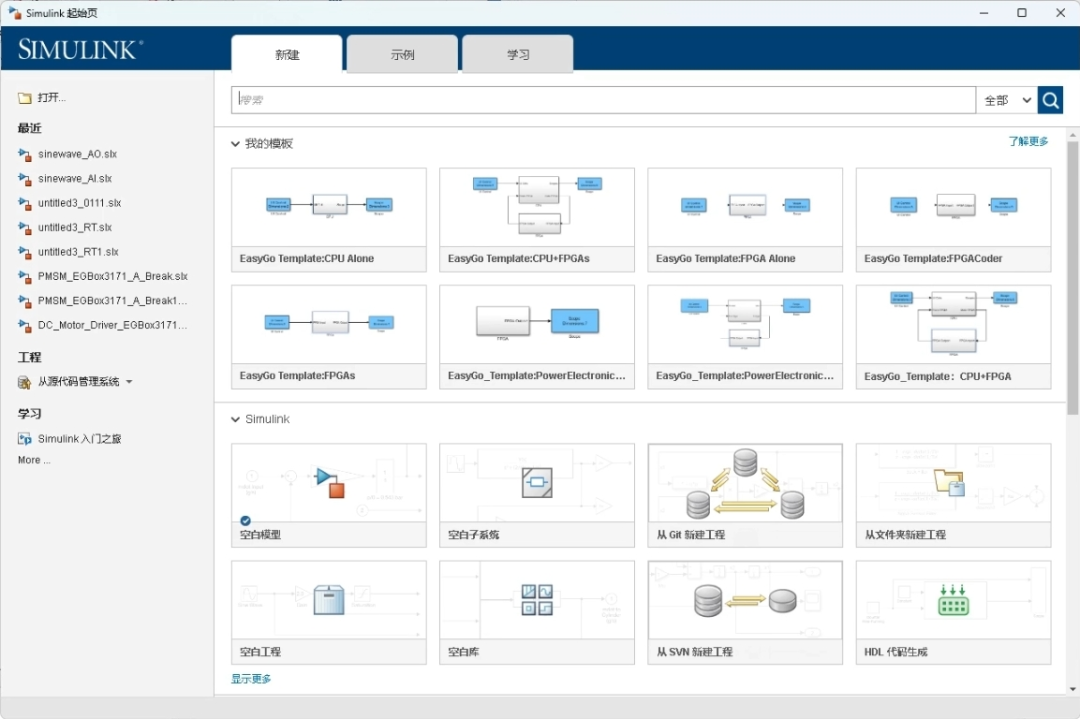
基于第一章節的實時性探討,我們同樣可以使用非RT版本的CarSim,而僅僅通過實時調用CarSim相關的API函數,將整車模型搬到個人電腦上來運行。
Carsim Controller
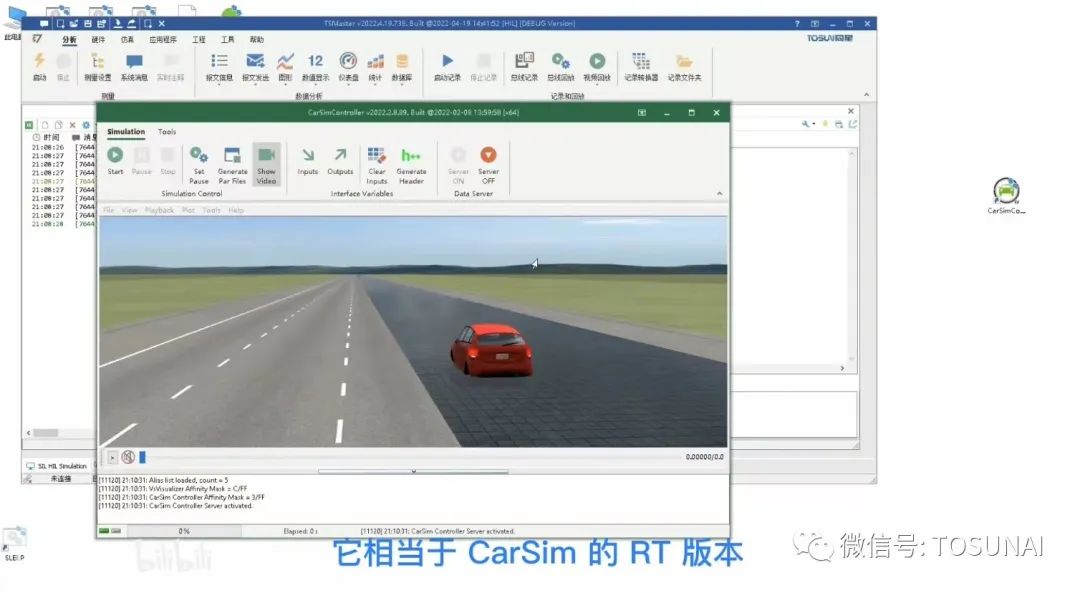
在這個例子中用到了我們專門為CarSim打造的CarSim Controller,它相當于CarSim的RT版本,具有在個人電腦上高精度的仿真車輛模型的能力。
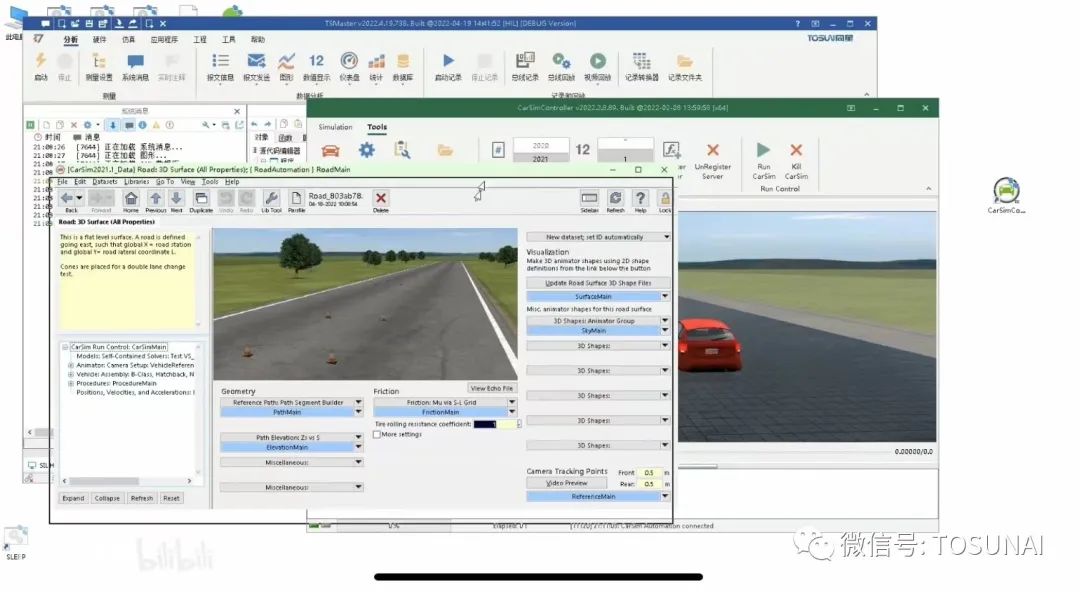
我們首先通過CarSim Controller打開CarSim的自動化實例,選定CarSim中需要運行的車輛模型配置,在此我們同樣使用的是對開路面,可以看到左側是高附右側是低附的灑水瓷磚。
我們再切換回CarSim Controller中,點擊運行按鈕,就可以實時的看到仿真的運行過程了。

當前我們看到車輛正在緩慢的前進,這是由于車輛處于怠速狀態的緣故。我們切換到輸入接口表中在這里可以瀏覽CarSim的流量接口變量,這相當于Simulink中的CarSim’s function inputs。我們過濾一下已經分配的接口變量,就可以看到我們預先配置的油門以及自動等輸入。我們可以通過界面也可以通過API來實時控制這個車輛模型。
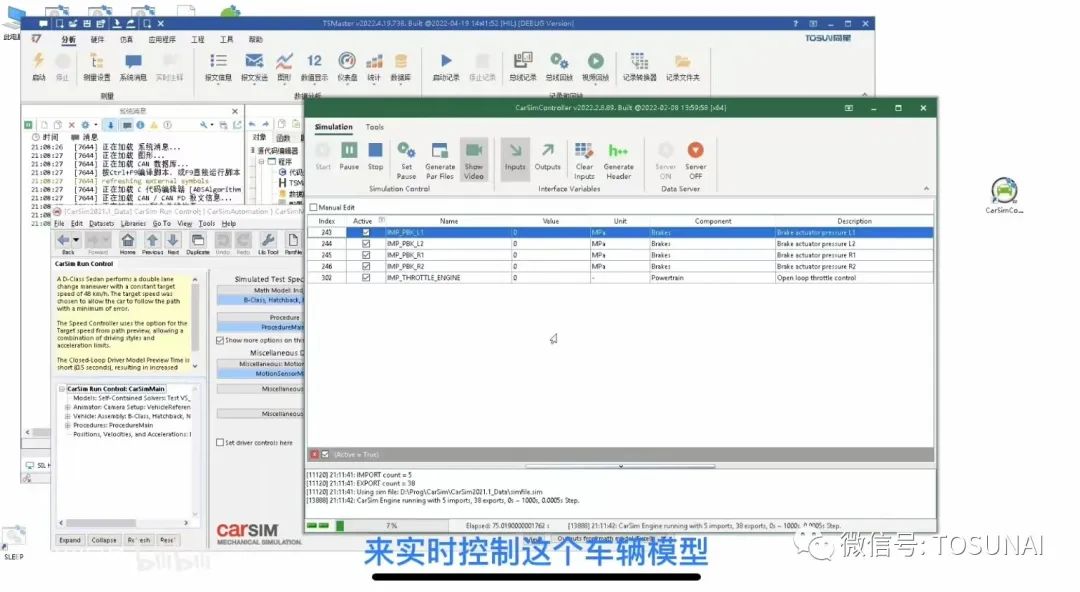
如果我們想要停止給油門,并且給左前輪施加自動壓力,例如15兆帕的自動壓力,切換到視頻中可以看到左前輪抱死,而其他車輪還在正常的滾動,以上便是車輛動力學的手動控制功能。
TSMaster對模型的自動控制
我們當然可以通過TSMaster對車輛模型施加可重現的自動控制,這就需要TSMaster加載一個CarSim Controller的客戶端,CarSim engine小程序庫。
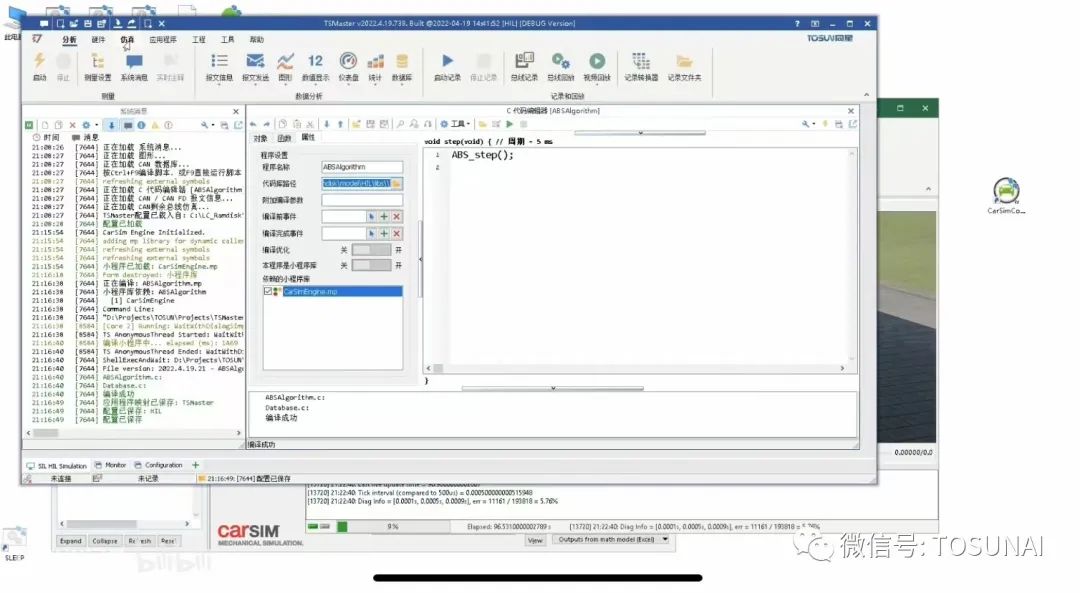
我們點開小程序庫,可以看到CarSim engine的小程序庫有一系列自動控制的API函數,他們負責完成CarSim車輛各類參數的自動修改、動力學模型實時控制等等一些列無人值守的自動化命令。從而實現僅僅使用個人電腦就可以執行CarSim RT等實時仿真的功能。而基于個人電腦直接運行HIL的好處是顯而易見的,各類參數的配置和部署都在本地,對比傳統HIL的部署可以說是瞬間完成。
而基于TSMaster的軟件平臺,我們就可以輕易的干預ECU算法中的任意變量。需要說明的是CarSim Controller僅僅是將一個動力學軟件CarSim做到實時控制的千萬種方法中的一種。基于此原理,同樣可以實現Carmaker等等其他動力學軟件的實時控制。(具體操作步驟詳情可直接觀看我們的B站視頻哦~)
-
控制器
+關注
關注
114文章
17791瀏覽量
193144
發布評論請先 登錄
直流固態變壓器控制策略仿真解決方案
核聚變裝置中PSM高壓電源的實時仿真與驗證
實時仿真技術在新能源領域的應用與探索

rt-studio支持仿真的時候變量實時刷新嗎?
工業級HIL系統選型參考:半實物仿真平臺全面解讀
遠寬能源與國際主流廠商:實時仿真五大平臺技術優勢解析
電源控制器MCU硬件在環(HIL)測試方案
光伏電池發電系統實時仿真

TSMaster x dSPACE:聯合仿真助力汽車測試效率再升級

利用EasyGo DeskSim創建實時仿真項目教程
風力發電系統篇:永磁直驅并網實時仿真




 工商網監
工商網監
評論