") AGV小車是如何通過AGV激光導(dǎo)航儀識別反光柱坐標
AGV小車是如何通過AGV激光導(dǎo)航儀識別反光柱坐標

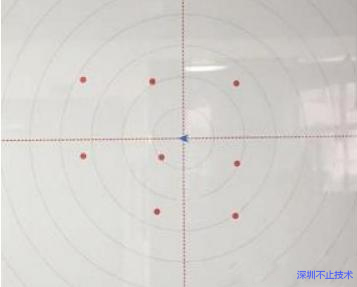
AGV小車定位原理——識別反光柱坐標
通過過濾反射系數(shù),可以得到同一反光柱上多個激光點的詳細數(shù)據(jù)(角度、距離、反射系數(shù))。然后通過簡單的數(shù)學(xué)計算和規(guī)律分析,就可以得到該反光柱相對導(dǎo)航儀的準確坐標。
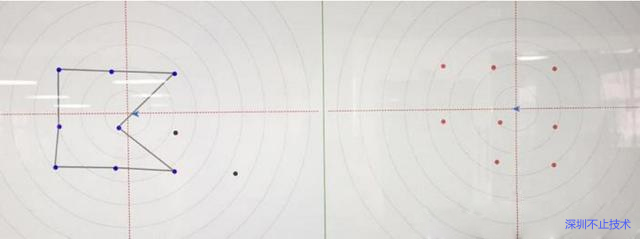
AGV叉車定位原理——定位匹配
想要獲得AGV激光導(dǎo)航儀坐標和角度,必須同時滿足以下2個條件:
①AGV叉車導(dǎo)航儀至少可以掃描到3個反光柱
②叉車AGV導(dǎo)航儀掃描到的多個反光柱構(gòu)成的圖形,在已有地圖數(shù)據(jù)中,可以成功匹配到相同構(gòu)形。利用已有地圖數(shù)據(jù),結(jié)合即時掃描的反光柱坐標,反推出AGV導(dǎo)航儀位姿。
深圳市不止技術(shù)有限公司是激光雷達行業(yè)頭部知名企業(yè),團隊自2016年底就開始了多款激光雷達方案的研發(fā),并創(chuàng)造了30多件發(fā)明專利,我們作為激光雷達行業(yè)5年多的資深老兵,對激光雷達有著深厚的技術(shù)積累。是一家能提供單點、單線到多線全系列、dtof、itof全品類激光雷達方案定制化的公司,而且掌握了機器人移動底盤技術(shù)。在激光雷達核心硬件、專用芯片、AI算法上具有完整的自主知識產(chǎn)權(quán)
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
激光雷達
+關(guān)注
關(guān)注
979文章
4470瀏覽量
196543 -
激光系統(tǒng)
+關(guān)注
關(guān)注
0文章
154瀏覽量
9750
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
AGV激光導(dǎo)航到底有什么過人之處?
激光導(dǎo)航AGV以±10毫米的精準定位、無需地面輔助的靈活部署,以及卓越的環(huán)境適應(yīng)力,成為智能制造時代的高效搬運解決方案,顯著提升生產(chǎn)柔性與長期經(jīng)濟效益。

物流革命時代:全流程AGV智能化
等功能,無需人工干預(yù)就能完成貨物運輸任務(wù)。 ? AGV物流 地牛AGV核心技術(shù):精準導(dǎo)航與智能控制 (一)導(dǎo)航技術(shù):精準定位,暢行無阻 激光

高效搬運+靈活轉(zhuǎn)向:AGV機器人,智能物流的極簡解決方案!
。 AGV智能物流 AGV的核心技術(shù)在于其自主導(dǎo)航與智能控制能力。通過激光雷達、視覺傳感器等先進設(shè)備,AGV能夠?qū)崟r感知周圍環(huán)境,實現(xiàn)精準定

倉儲中心的AGV升級項目AGV小車通過modbus rtu轉(zhuǎn)profinet模塊與西門子1200 PLC進行數(shù)據(jù)互傳解決案例
倉 一、 項目痛點:移動單元內(nèi)的“信息阻塞” 某大型電商倉儲中心的AGV升級項目中,其AGV小車采用了高性能的西門子S7-1200/1500系列PLC作為主控大腦,通過PROFINET
大型電商倉儲物流中心AGV小車通過Modbus RTU轉(zhuǎn)Profinet模塊與西門子PLC進行數(shù)據(jù)互傳解決案例
AGV的路徑規(guī)劃、任務(wù)調(diào)度和交通管理。為了實現(xiàn)高精度導(dǎo)航,每臺AGV均配備了先進的激光導(dǎo)航傳感器,用于實時掃描周圍環(huán)境,獲取自身的精確

Modbus RTU轉(zhuǎn)Profinet:AGV小車與西門子1500PLC數(shù)據(jù)互通的大型電商倉儲物流案例
AGV的路徑規(guī)劃、任務(wù)調(diào)度和交通管理。為了實現(xiàn)高精度導(dǎo)航,每臺AGV均配備了先進的激光導(dǎo)航傳感器,用于實時掃描周圍環(huán)境,獲取自身的精確

AGV:智能制造時代的物流中樞
生力軍。 AGV立庫 一、技術(shù)突破:從軌道到無軌的智能進化 多模態(tài)導(dǎo)航系統(tǒng) 現(xiàn)代AGV采用SLAM(同步定位與建圖)技術(shù),通過激光雷達+視覺融合方案實現(xiàn)厘米級定位,較傳統(tǒng)磁條
AGV機器人選型技術(shù)分析與應(yīng)用策略
效果的詮釋 。 AGV立庫 一、AGV選型核心參數(shù)對比 導(dǎo)航技術(shù) 激光導(dǎo)航 :精度±10mm,適用于高動態(tài)環(huán)境,但成本較高。 磁條
AGV:工廠里的隱形搬運工
之一,具有自動化程度高、靈敏、安全等特色。 AGV工廠 一、AGV的三大核心技術(shù) 1.導(dǎo)航系統(tǒng) 激光導(dǎo)航:
EtherNet/IP轉(zhuǎn)MODBUS TCP網(wǎng)關(guān)配置:SCADA與AGV小車高效通訊指南
協(xié)議轉(zhuǎn)換網(wǎng)關(guān) ,通過 EtherNet/IP轉(zhuǎn)MODBUS TCP 協(xié)議轉(zhuǎn)換功能,實現(xiàn)SCADA系統(tǒng)與AGV小車的無縫通信。 二、設(shè)備配置與

如何選擇合適的背負式AGV小車
場地布局和空間限制:根據(jù)工作場所的布局,選擇適合的聯(lián)集AGV小車尺寸和類型。例如,在狹窄的通道或空間有限的區(qū)域,可選擇體積較小、轉(zhuǎn)彎半徑小的聯(lián)集AGV小車。 環(huán)境條件:如果工作環(huán)境存
細說AGV叉車的導(dǎo)航,如何精準定位并選取最優(yōu)路徑?
廠家-自動化叉車-智能搬運碼垛機器人-智能叉車系統(tǒng)解決方案專家 一、導(dǎo)航技術(shù) 激光導(dǎo)航技術(shù) 激光SLAM導(dǎo)航 :這是目前應(yīng)用較為廣泛的

一種基于分數(shù)階 PID 直流電機調(diào)速的 AGV 控制系統(tǒng)
電傳感器實現(xiàn)避障,并采用上位機對其進行監(jiān)控。為達到 AGV 電機調(diào)速的穩(wěn)定性與實時性,采用分數(shù)階 PID 算法進行控制,通過 Matlab軟件進行建模與仿真,驗證其可行性。最后,經(jīng)實際應(yīng)用場合驗證,AGV
發(fā)表于 03-25 15:10
AGV小車廠房限速多少?
和大規(guī)模應(yīng)用。 目前,一些傳統(tǒng)制造企業(yè)在倉儲物流管理方面,開始借鑒和運用成熟的電商智能倉儲的經(jīng)驗,通過AGV來實現(xiàn)高效、少人的倉儲分揀作業(yè)。 AGV倉儲物流 在廠房內(nèi),AGV(自動導(dǎo)引



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論