 瑞薩e2studio----外部中斷&定時器配置輸入捕獲測量頻率
瑞薩e2studio----外部中斷&定時器配置輸入捕獲測量頻率


1.概述
本篇文章主要介紹如何使用e2studio對瑞薩單片機外部中斷進行輸入捕獲,同時通過定時器計算其頻率和占空比,同時輸入一個PWM驗證是否正確。
2.硬件準備
首先需要準備一個開發板,這里我準備的是芯片型號 R7FA2L1AB2DFL 的開發板。
3.新建工程

4.工程模板
5.保存工程路徑

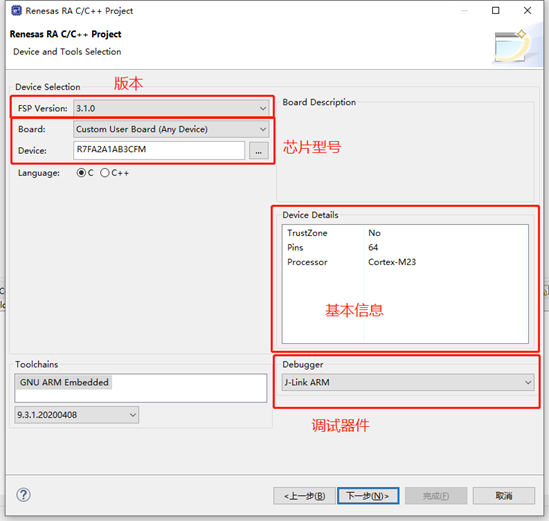
6.芯片配置
本文中使用R7FA2L1AB2DFL來進行演示。
7
7.工程模板選擇
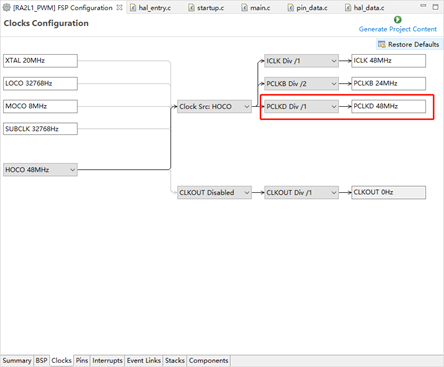
8.選擇定時器

時鐘源在這設置的是PCKLD 48M 。
可以通過修改該頻率來修改占空比頻率。
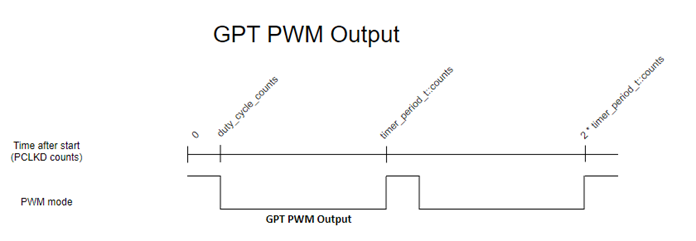
9.PWM(脈沖寬度調制)
脈沖寬度調制是一種模擬控制方式,根據相應載荷的變化來調制晶體管基極或MOS管柵極的偏置,來實現晶體管或MOS管導通時間的改變,從而實現開關穩壓電源輸出的改變。這種方式能使電源的輸出電壓在工作條件變化時保持恒定,是利用微處理器的數字信號對模擬電路進行控制的一種非常有效的技術。脈沖寬度調制是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術,廣泛應用在從測量、通信到功率控制與變換的許多領域中。
在瑞薩RA系列MCU中有兩種定時器,一種是通用PWM定時器GPT,另外一種是異步通用定時器AGT。
頻率=主頻/period
+占空比=cycle/period
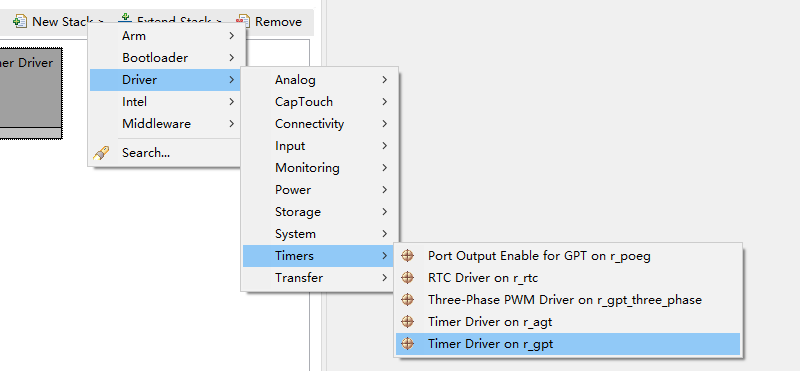
10.定時器配置
點擊Stacks->New Stack->Driver->Timers->Timer Driver on r_gpt。
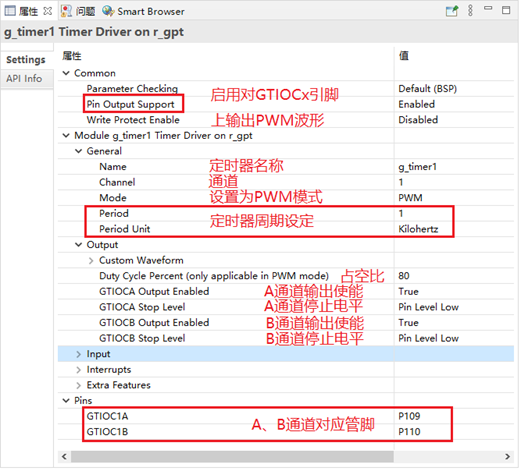
11.定時器輸出PWM配置
設置PWM輸出,輸出頻率為1kHz,占空比為80%。
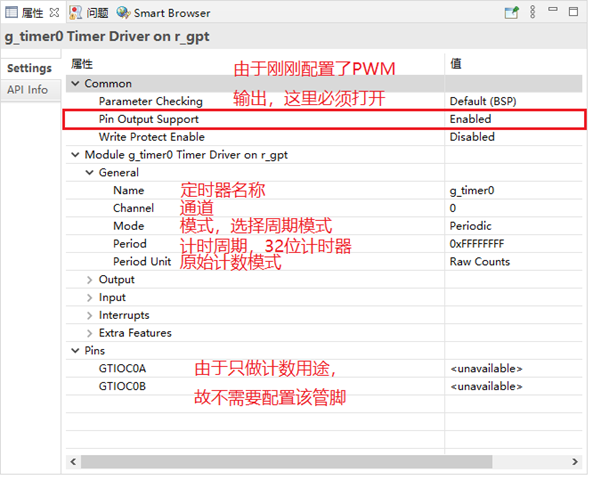
12.定時器輸入捕獲配置
點擊Stacks->New Stack->Driver->Timers->Timer Driver on r_gpt。
設置定時器制作計數器配置,由于不需要對上升沿和下降沿進行捕獲,故只需配置為計數模式即可。
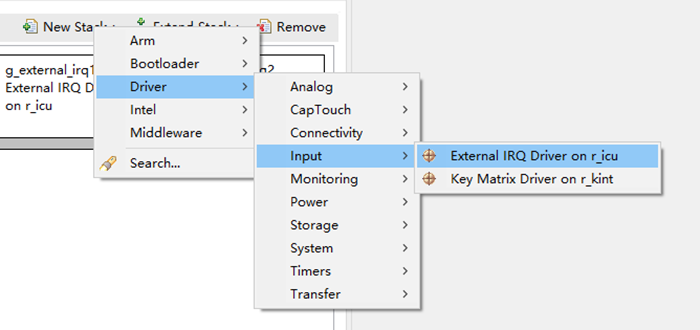
13.IRQ配置
點擊Stacks->New Stack->Driver->Input -> External IRQ Driver on r_icu 。
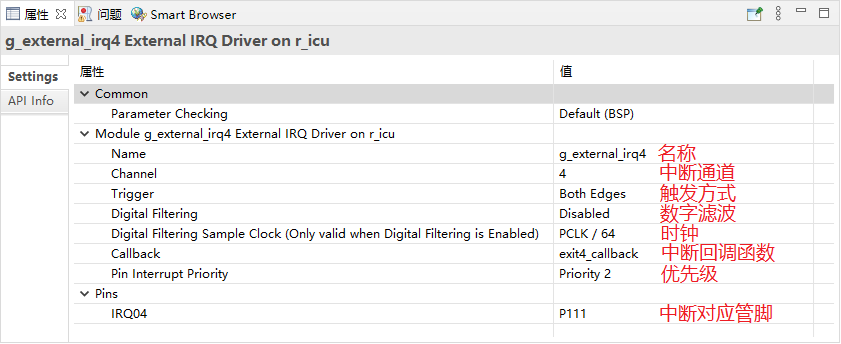
14.IRQ屬性配置
由于需要計算頻率和占空比,故需要設置觸發方式為雙邊觸發的模式。
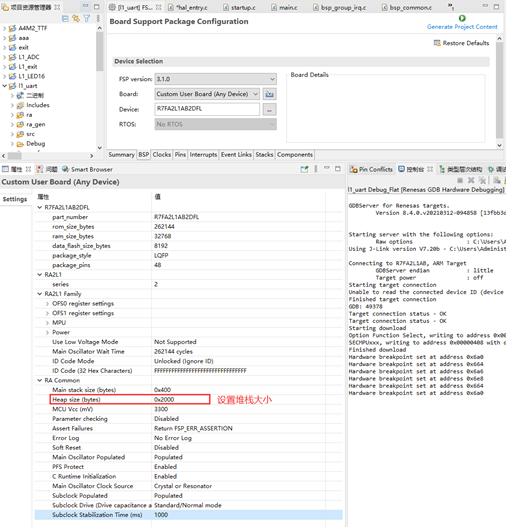
15.設置e2studio堆棧
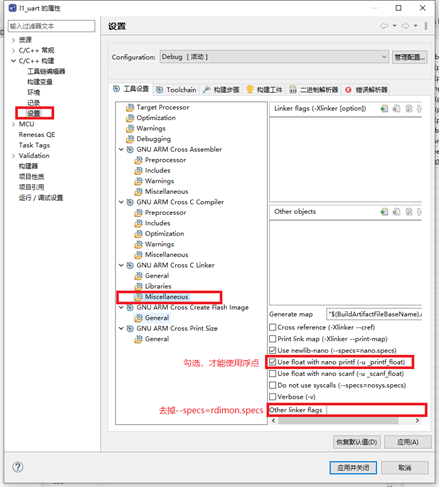
16.e2studio的重定向printf設置
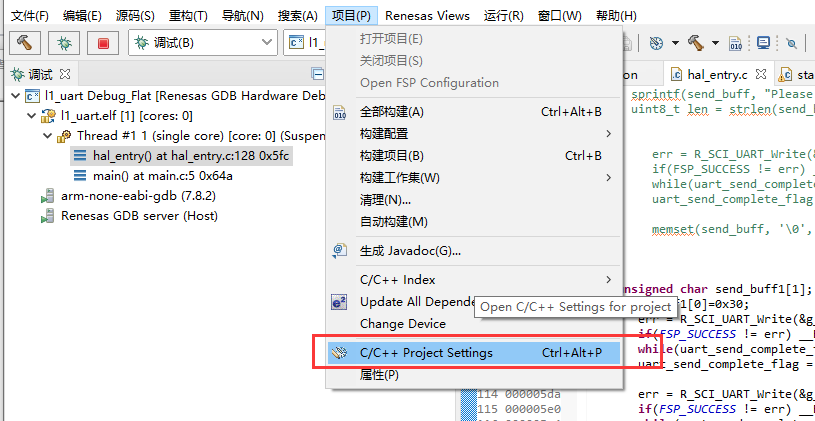
C++ 構建->設置->GNU ARM Cross C Linker->Miscellaneous去掉Other linker flags中的 “--specs=rdimon.specs”
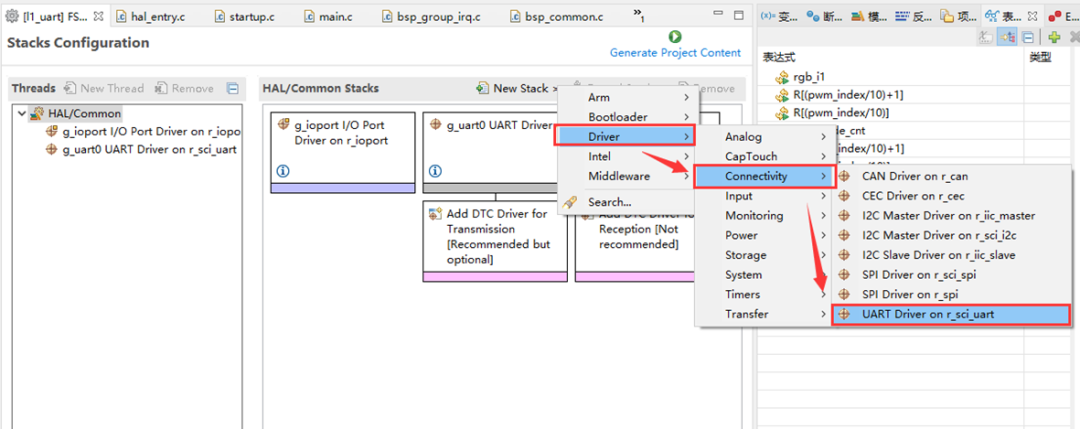
17.UART配置
點擊Stacks->New Stack->Driver->Connectivity -> UART Driver on r_sci_uart。
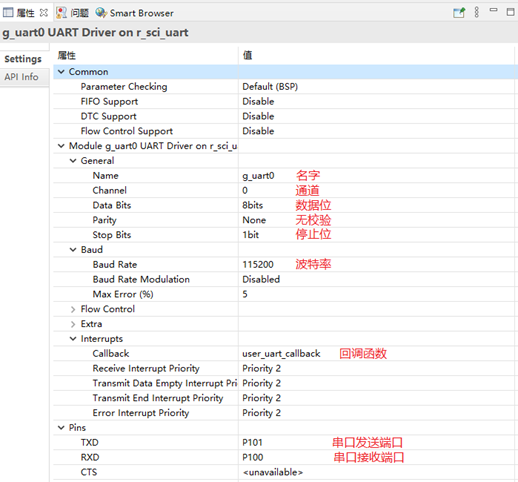
18.UART屬性配置
配置串口,用于打印數據。
19.printf輸出重定向到串口
打印最常用的方法是printf,所以要解決的問題是將printf的輸出重定向到串口,然后通過串口將數據發送出去。
注意一定要加上頭文件#include
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i;i++)>
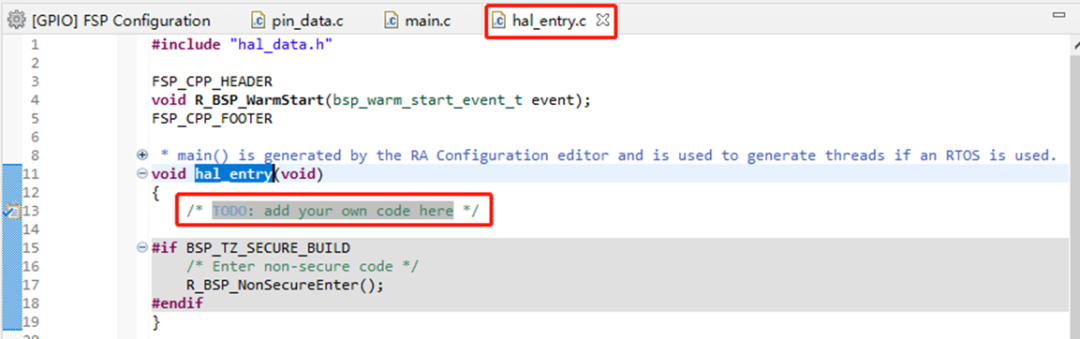
20.工程文件
打開hal_entry.c,可以看到在hal_entry函數內,注釋著可以在這輸入自己的代碼。
21.占空比與頻率計算
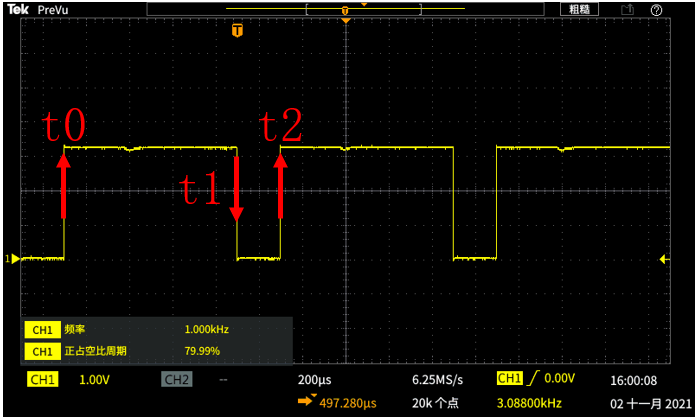
占空比=(t1-t0)/(t2-t0)
頻率=(t2-t0)/時鐘頻率= =(t2-t0)/48M
22.回調函數exit4_callback()
由于設置了上升沿和下降沿都會進入回調函數中,故需要判斷引腳電平來判斷是屬于高電平還是低電平。
bsp_io_level_t p_port_value_port_111;
/*讀取端口電平狀態,如果是低電平則發生的是下降沿,高電平則是上升沿*/
R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_01_PIN_11, &p_port_value_port_111);
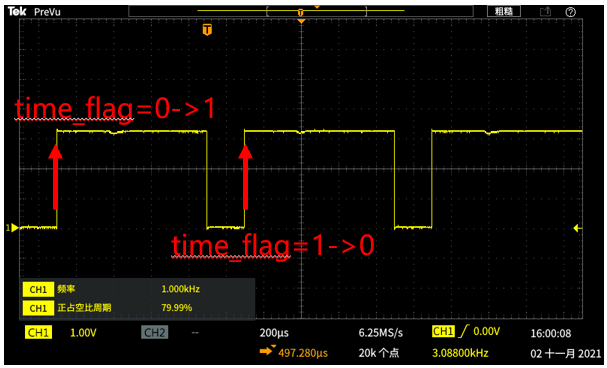
周期需要2個上升沿去判斷,設定第一個上升沿time_flag由0變為1,則第二個上升沿則為time_flag由1變為0.
計算周期需要注意定時器周期計數器溢出,若存在time_flag= 0->1讀取的計數值大于time_flag= 1->0讀取的計數值,則一個周期為g_capture_num=current_period_counts+g_capture_num1-g_capture_num0。
若沒有溢出,則g_capture_num=g_capture_num1-g_capture_num0。
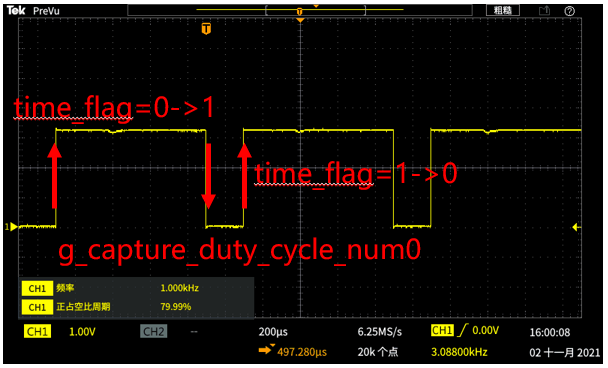
頻率則需要計算下降沿到time_flag=1的一個周期,在除以g_capture_num(48M)。
計算頻率需要注意定時器周期計數器溢出,若存在time_flag= 0->1讀取的計數值大于g_capture_duty_cycle_num0讀取的計數值,則一個周期為g_capture_num=current_period_counts+g_capture_num1-g_capture_num0。若沒有溢出,則g_capture_duty_cycle_num=g_capture_duty_cycle_num0-g_capture_num0。
23.代碼
#include "hal_data.h"
#include
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;//串口發送完畢標志位
volatile bool time_flag = 0;//上升沿標志位
volatile uint64_t g_capture_num =0;//兩個上升沿之間的周期
volatile uint64_t g_capture_num0 =0;//第0個上升沿定時器計數值
volatile uint64_t g_capture_num1 =0;//第1個上升沿定時器計數值
volatile uint64_t g_capture_frequency = 0;//頻率
volatile float g_capture_duty_cycle =0;//占空比
volatile int g_capture_duty_cycle_num =0;//+占空比周期
volatile uint64_t g_capture_duty_cycle_num0 =0;//下降沿定時器計數值
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i=g_capture_num0)
g_capture_num=g_capture_num1-g_capture_num0;
else
g_capture_num=current_period_counts+g_capture_num1-g_capture_num0;
g_capture_frequency= frequency/g_capture_num;//計算頻率
}
}
else
{
if(time_flag==1)
{
g_capture_duty_cycle_num0=status.counter;
if(g_capture_duty_cycle_num0>=g_capture_num0)
g_capture_duty_cycle_num=g_capture_duty_cycle_num0-g_capture_num0;
else
g_capture_duty_cycle_num=current_period_counts+g_capture_duty_cycle_num0-g_capture_num0;
g_capture_duty_cycle=(g_capture_duty_cycle_num*100/(float)g_capture_num);//占空比
}
}
}
void hal_entry(void)
{
/* TODO: add your own code here */
err = R_SCI_UART_Open(&g_uart0_ctrl, &g_uart0_cfg);
assert(FSP_SUCCESS == err);
/* Initializes the module. */
err = R_GPT_Open(&g_timer0_ctrl, &g_timer0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Start the timer. */
(void) R_GPT_Start(&g_timer0_ctrl);
/* Enable captures. Captured values arrive in the interrupt. */
(void) R_GPT_Enable(&g_timer0_ctrl);
/* Initializes the module. */
err = R_GPT_Open(&g_timer1_ctrl, &g_timer1_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Start the timer. */
(void) R_GPT_Start(&g_timer1_ctrl);
/* Configure the external interrupt. */
fsp_err_t err = R_ICU_ExternalIrqOpen(&g_external_irq4_ctrl, &g_external_irq4_cfg);
assert(FSP_SUCCESS == err);
/* Enable the external interrupt. */
/* Enable not required when used with ELC or DMAC. */
err = R_ICU_ExternalIrqEnable(&g_external_irq4_ctrl);
assert(FSP_SUCCESS == err);
while(1)
{
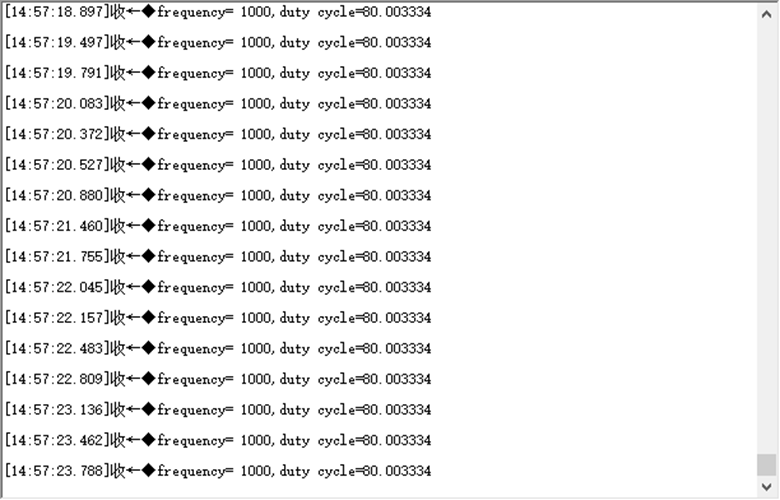
printf("frequency= %lld,duty cycle=%f\n",g_capture_frequency,g_capture_duty_cycle);
g_capture_num=0;
g_capture_duty_cycle=0;
R_BSP_SoftwareDelay (200, BSP_DELAY_UNITS_MILLISECONDS);
}
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
};i++)>
24.結果演示
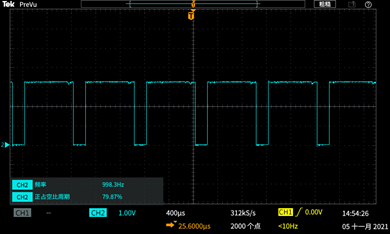
頻率1K 占空比80%
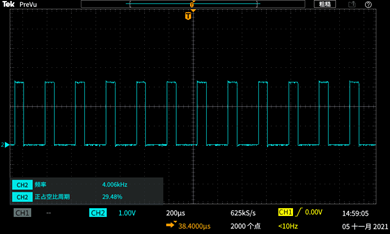
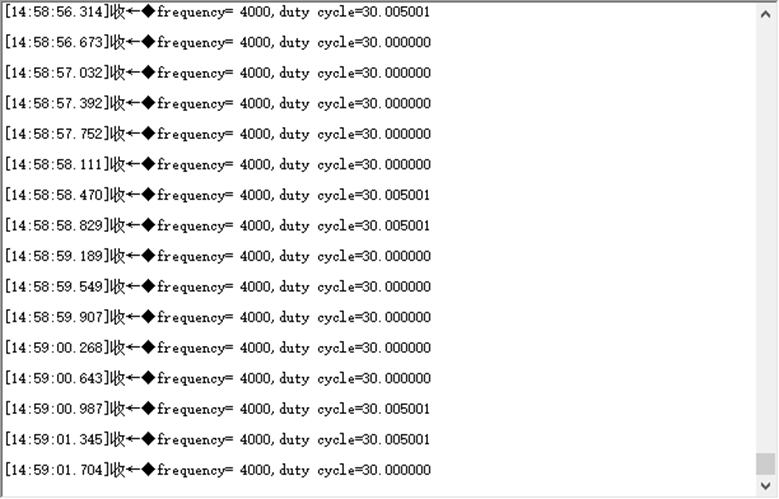
頻率4K 占空比30%
25.視頻教學
視頻教學稍后會在B站官方賬號更新,請留意B站視頻更新~

原創:By RA_Billy Xiao
原文標題:瑞薩e2studio----外部中斷&定時器配置輸入捕獲測量頻率
文章出處:【微信公眾號:RA生態工作室】歡迎添加關注!文章轉載請注明出處。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
mcu
+關注
關注
147文章
18925瀏覽量
398207 -
ARM
+關注
關注
135文章
9553瀏覽量
391889 -
嵌入式
+關注
關注
5198文章
20449瀏覽量
334070 -
開發板
+關注
關注
26文章
6291瀏覽量
118121
發布評論請先 登錄
相關推薦
熱點推薦
羅德與施瓦茨宣布推出新頻段 R&S ZNB3000 矢量網絡分析儀,頻率高達 54 GHz
瓦茨(以下簡稱“R&S”)在今年的歐洲微波周(EuMW)上展示頻率覆蓋高達54GHz的新型號ZNB3000,此系列矢量網絡分析儀助力工程師快速獲得測量結果。R&SZNB

【瑞薩RA6E2】瑞薩E2S軟件安裝過程,等待過程玩下97_e2 studio_ZGZZ
;amp;vd_source=7ab92f6a337b22fda39554fd6e70f01a
本報告旨在記錄基于瑞薩RA6E2 MCU評估
發表于 12-01 22:42
?基于INA-DUAL-2AMP-EVM評估模塊的技術解析與應用指南
) 和SOIC-16 (DW) INA封裝兼容。Texas Instruments INA-DUAL-2AMP-EVM設計用于評估采用單電源和雙電源配置的器件的性能。
1218 MHz 高輸出 GaN CATV 功率倍增器 Amp擴音器 skyworksinc
電子發燒友網為你提供()1218 MHz 高輸出 GaN CATV 功率倍增器 Amp擴音器相關產品參數、數據手冊,更有1218 MHz 高輸出 GaN CATV 功率倍增器
發表于 09-01 18:30

870 MHz、25 dB 增益 CATV 功率倍增器 Amp擴音器 skyworksinc
電子發燒友網為你提供()870 MHz、25 dB 增益 CATV 功率倍增器 Amp擴音器相關產品參數、數據手冊,更有870 MHz、25 dB 增益 CATV 功率倍增器
發表于 09-01 18:30
1 GHz、28 dB 增益 CATV 功率倍增器 Amp擴音器 skyworksinc
電子發燒友網為你提供()1 GHz、28 dB 增益 CATV 功率倍增器 Amp擴音器相關產品參數、數據手冊,更有1 GHz、28 dB 增益 CATV 功率倍增器
發表于 08-29 18:35
案例研究:Atola Taskforce 2 借助 MB699VP-B &amp;amp; MB705M2P-B 優化取證設備數據采集
的?TaskForce2?設備,以實現多驅動器取證采集的卓越性能。該設備支持通過多種接口并同時進行多達26個映像任務?,具體接口配置如下:8個SATA接口8個SAS/SATA接口4個

GRAS 發布全新座艙測試支架 AutoArray:PR0003 &amp;amp; PR0004!
堅固耐用的六傳聲器陣列專為實現車內聲學測量的高精度和可重復性而設計。PR0003采用基于哈曼等車載系統公司成熟測試方法的“Cross”配置。而PR0004則遵循AESTC-

CS86706適用1~3節鋰電應用,內置升壓模塊,2×30W立體聲&amp;amp;50W單聲道R類音頻功率放大器
CS86706適用1~3節鋰電應用,內置升壓模塊,2×30W立體聲&amp;50W單聲道R類音頻功率放大器

新知|Verizon與AT&amp;amp;T也可以手機直接連接衛星了
近日,Verizon與AT&T宣布,手機直連衛星方面取得重要進展,使用普通手機實現了通過衛星的視頻通話。很顯然,Verizon與AT&T的這一舉措是針對此前T-Mobile

rt-thread studio debug生成了elf &amp;amp; map,為什么不生成反匯編?
開發中crash后dump出了現場,需要通過反匯編文件確定crash的lr &amp; pc,大部分使用rtthread studio的環境是windows,在windows下倒反匯編文件
發表于 06-11 06:42
多模塊配置!YU系列USB、Type-C連接器為工控機打造&amp;quot;全能型&amp;quot;數據傳輸方案
背景介紹工控機是一類用于工業、野外等復雜惡劣環境的專用計算機設備,如何實現穩如磐石的數據傳輸是關鍵?凌科電氣YU-USB&Type-C工業連接器,以嚴苛環境適配性及長期穩定的性能表現,成為

Banana Pi 發布 BPI-AI2N &amp; BPI-AI2N Carrier,助力 AI 計算與嵌入式開發
2025年3月19日——Banana Pi 今日正式發布 BPI-AI2N & BPI-AI2N Carrier,基于瑞薩電子(Re



 工商網監
工商網監
評論