 stm32mp1 Cortex M4開發篇5:串行通訊接口
stm32mp1 Cortex M4開發篇5:串行通訊接口

寫在前面:
本文章為《ARM Cortex-M4裸機開發篇》系列中的一篇,,全系列總計14篇。筆者使用的開發平臺為華清遠見FS-MP1A開發板(STM32MP157開發板),Cortex-M4裸機開發篇除了講M4裸機開發外,還會講解通過M4控制資源擴展板上的各種傳感器執行器模塊(包括空氣溫濕度傳感器、LED燈、數碼管、蜂鳴器、震動馬達、按鍵中斷、風扇等),本篇是M4控制資源擴展板中的一篇。
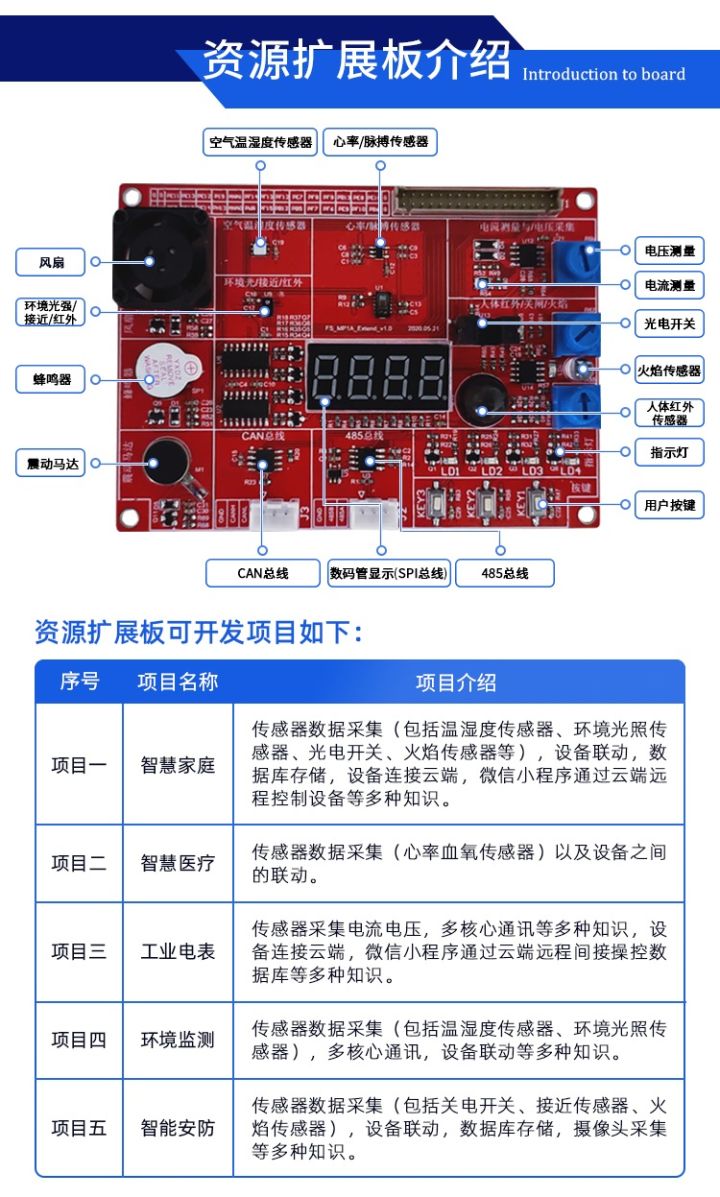
資源擴展板是FS-MP1A開發板的擴展模塊,主要包含了10余種助主流傳感器、執行器件、總線控制器件,非常方便項目擴展用。可拓展開發智慧家庭、智能醫療、智能安防、工業控制、圖像識別、環境檢測等方向的10個左右綜合項目,華清遠見開發板也將配套提供所有項目的說明文檔、實驗源碼、應用程序等資料。
針對FS-MP1A開發板,除了Cortex-M4裸機開發篇外,還包括其他多系列教程,包括Cortex-A7開發篇、FreeRTOS篇、Linux基礎及應用開發篇、Linux系統移植篇、Linux驅動開發篇、硬件設計篇、人工智能機器視覺篇、Qt應用編程篇、Qt綜合項目實戰篇等。22457259672
資源擴展板介紹
硬件介紹&資源擴展板可開發項目
Cortex-M4 串行通訊接口
實驗目的
熟悉STM32CubeIDE工具軟件的使用。
掌握STM32CubeIDE軟件的基本設計流程和設計步驟,能夠使用工具進行設計、編程、仿真調試。
學習UART串口的使用方法,掌握如何利用STM32MP157A芯片的串口輸入輸出。
實驗環境
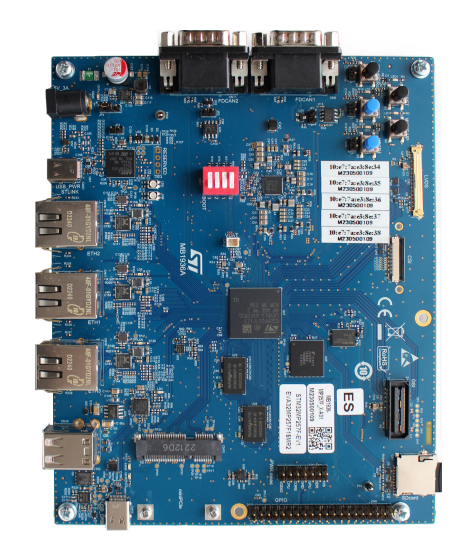
FS-MP1A開發平臺
ST-Link仿真器
STM32CubeIDE開發軟件
PC機 XP、Window7/10 (32/64bit)
串口調試工具
實驗原理
串口是計算機上一種非常通用設備通信的協議(不要與通用串行總線Universal Serial Bus 或者USB 混淆)。大多數計算機包含兩個基于RS232 的串口。串口同時也是儀器儀表設備通用的通信協議;很多GPIB(通用接口總線)兼容的設備也帶有RS-232 口。同時,串口通信協議也可以用于獲取遠程采集設備的數據。
串口通信的概念非常簡單,串口按位(bit)發送和接收字節。盡管比按字節(byte)的并行通信慢,但是串口可以在使用一根線發送數據的同時用另一根線接收數據。它很簡單并且能夠實現遠距離通信。典型地,串口用于ASCII碼字符的傳輸。通信使用3根線完成:(1)地線,(2)發送,(3)接收。由于串口通信是異步的,端口能夠在一根線上發送數據同時在另一根線上接收數據。其他線用于握手,但是不是必須的。串口通信最重要的參數是波特率、數據位、停止位和奇偶校驗。
對于兩個進行通行的端口,這些參數必須匹配:
波特率:這是一個衡量通信速度的參數。它表示每秒鐘傳送的bit的個數。例如300波特表示每秒鐘發送300個bit。當我們提到時鐘周期時,我們就是指波特率例如如果協議需要4800波特率,那么時鐘是4800Hz。這意味著串口通信在數據線上的采樣率為4800Hz。通常電話線的波特率為14400,28800和36600。波特率可以遠遠大于這些值,但是波特率和距離成反比。高波特率常常用于放置的很近的儀器間的通信,典型的例子就是GPIB設備的通信。
數據位:這是衡量通信中實際數據位的參數。當計算機發送一個信息包,實際的數據不會是8位的,標準的值是5、7和8位。如何設置取決于你想傳送的信息。比如,標準的ASCII碼是0~127(7位)。擴展的ASCII碼是0~255(8位)。如果數據使用簡單的文本(標準ASCII碼),那么每個數據包使用7位數據。每個包是指一個字節,包括開始/停止位,數據位和奇偶校驗位。由于實際數據位取決于通信協議的選取,術語“包”指任何通信的情況。
停止位:用于表示單個包的最后一位。典型的值為1 ,1.5和2位。這里的1.5位的數據寬度,就是1.5個波特率,由于數據是在傳輸線上定時的,并且每一個設備有其自己的時鐘,很可能在通信中兩臺設備間出現了小小的不同步。因此停止位不僅僅是表示傳輸的結束,并且提供計算機校正時鐘同步的機會。適用于停止位的位數越多,不同時鐘同步的容忍程度越大,但是數據傳輸率同時也越慢。
奇偶校驗位:在串口通信中一種簡單的檢錯方式。有四種檢錯方式:偶、奇、高和低。當然沒有校驗位也是可以的。對于偶和奇校驗的情況,串口會設置校驗位(數據位后面的一位),用一個值確保傳輸的數據有偶個或者奇個邏輯高位。例如,如果數據是011,那么對于偶校驗,校驗位為0,保證邏輯高的位數是偶數個。如果是奇校驗,校驗位位1 ,這樣就有3個邏輯高位。高位和低位不真正的檢查數據,簡單置位邏輯高或者邏輯低校驗。這樣使得接收設備能夠知道一個位的狀態,有機會判斷是否有噪聲干擾了通信或者是否傳輸和接收數據是否不同步.
硬件流控制: 硬件流控制常用的有RTS/CTS流控制和DTR/ R(數據終端就緒/數據設置就緒)流控制。硬件流控制必須將相應的電纜線連上,用RTS/CTS(請求發送/清除發送)流控制時,應將通訊兩端的RTS、CTS線對應相連,數據終端設備(如計算機)使用RTS來起始調制解調器或其它數據通訊設備的數據流,而數據通訊設備(如調制解調器)則用CTS來起動和暫停來自計算機的數據流。這種硬件握手方式的過程為:我們在編程時根據接收端緩沖區大小設置一個高位標志(可為緩沖區大小的75%)和一個低位標志(可為緩沖區大小的25%),當緩沖區內數據量達到高位時,我們在接收端將CTS線置低電平(送邏輯0),當發送端的程序檢測到CTS為低后,就停止發送數據,直到接收端緩沖區的數據量低于低位而將CTS置高電平。RTS則用來標明接收設備有沒有準備好接收數據。
常用的流控制還有還有DTR/ R(數據終端就緒/數據設置就緒)。我們在此不再詳述。
STM32串口設置一般可以總結為如下幾個步驟:
- 串口時鐘使能,GPIO時鐘使能
- 設置引腳復用映射
- GPIO初始化設置,模式為復用功能
- 串口參數初始化:設置波特率,字長,奇偶校驗等參數
- 開啟中斷并初始化NVIC,使能中斷(如果需要開啟中斷才需要這個步驟)
- 使能串口
- 編寫中斷處理函數
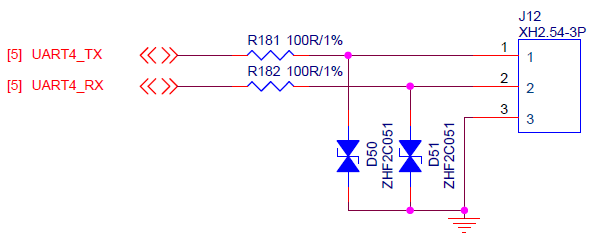
串口硬件原理圖:


HAL庫函數解析:
HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
這兩個函數是輪詢方式發送和接收
HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
這兩個函數是以中斷方式發送和接收。具體傳參詳見工程。
注意:這兩個函數里為指定緩沖區和大小并開啟中斷。實際上數據還在中斷里處理
HAL庫提供了用戶中斷處理函數方式,是調用回調函數。
接收中斷在用戶代碼里重定義void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
發送中斷在用戶代碼里重定義void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart);
實驗步驟
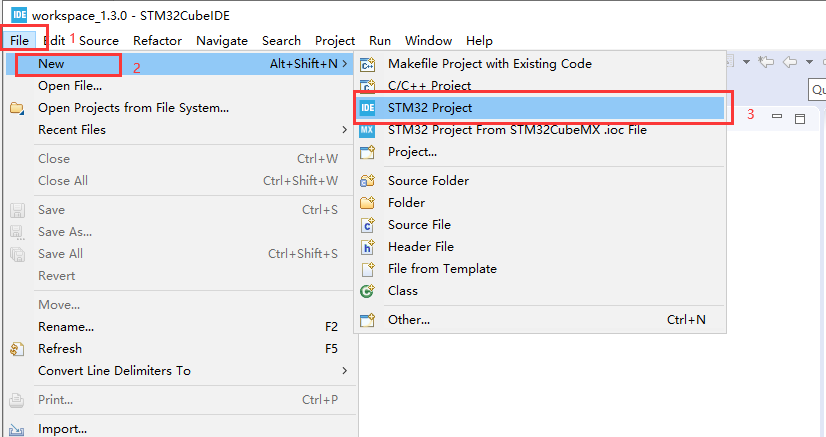
打開STM32CubeIDE->File->New->STM32 Project
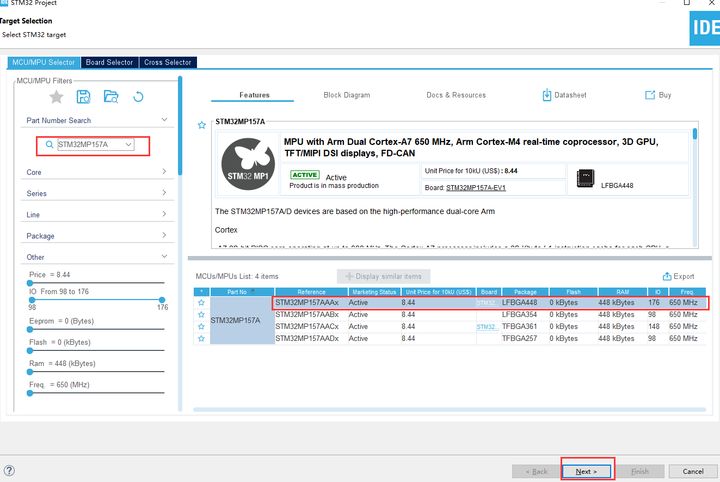
可以在左側搜索框內輸入芯片型號STM32MP157A進行搜索,選擇對應芯片,點擊Next
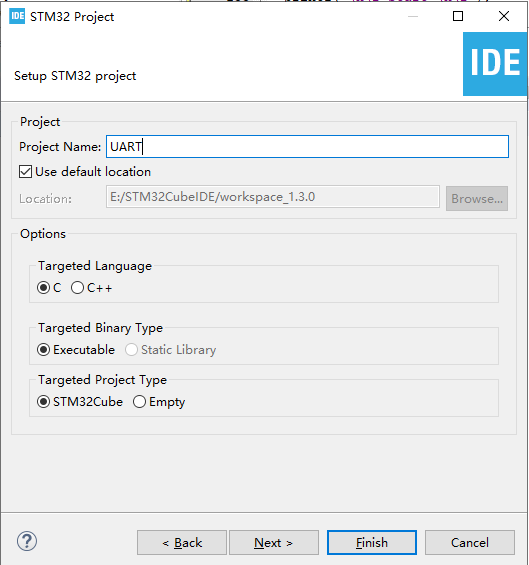
填寫工程名,點擊Finsh
點擊Yes打開配置頁面
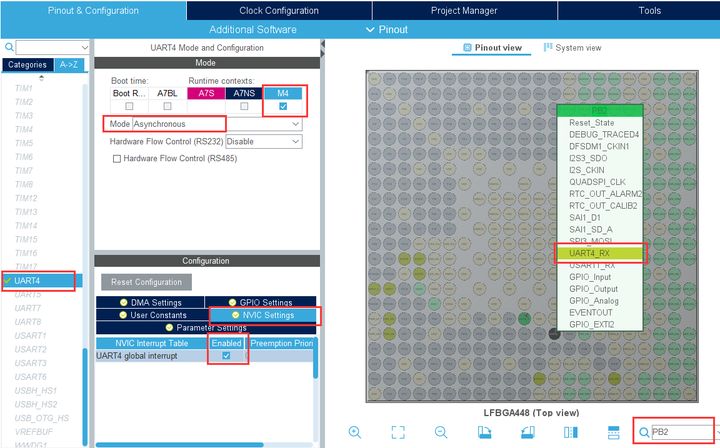
配置UART4,勾選Cortex-M4,Mode選擇Asynchronous,NVIC Settings 勾選Enabled使能串口中斷,搜索框搜索PB2、PG11,分別配置為UART4_RX、UART4_TX
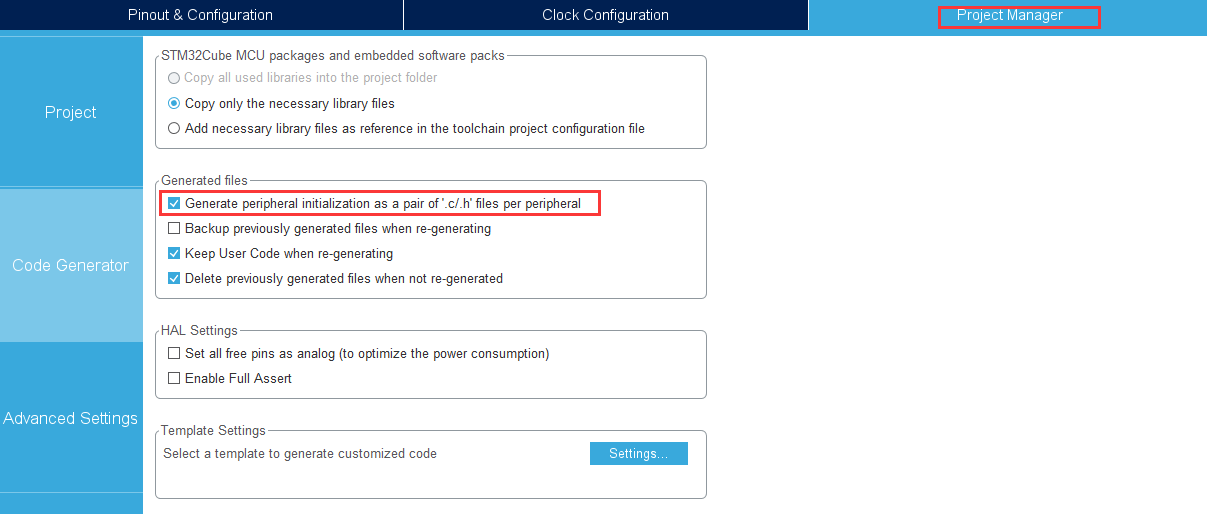
在Code Generator處選擇為每個外設生成單獨的C和H文件,這樣設置方便閱讀代碼
完成以上設置后,Ctrl+S保存,會提示是否需要生成代碼,選擇Yes即可自動生成代碼。系統會自動生成System Clock代碼
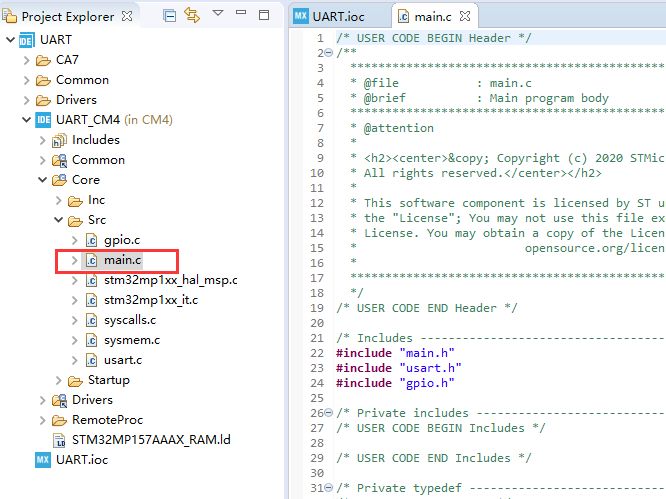
可以在左側工程文件夾找到UART_CM4子工程,打開main.c
添加串口中斷回調函數HAL_UART_RxCpltCallback
| 12345 | void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){ HAL_UART_Transmit(&huart4, Buff, 5, 100);} |
在主函數中調用串口中斷接收函數 HAL_UART_Receive_IT(&huart4, Buff, 5);
上述為新建工程配置過程,可參考12.3.2章節進行導入已有工程,工程存放路徑【華清遠見-FS-MP1A開發資料\02-程序源碼\ARM體系結構與接口技術\Cortex-M4\4_UART】
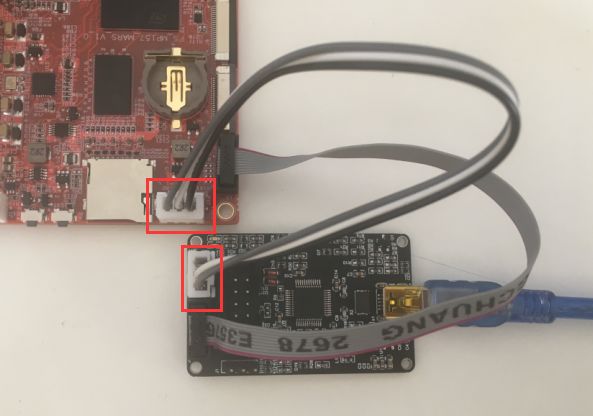
配置完成或導入工程后進行程序下載,具體步驟參考12.3.3節進行開發板連接,程序編譯、下載
實驗現象
連接串口線,打開串口調試助手,選擇串口號,波特率115200,打開串口,發送5個字符,可以看到也成功接收到發送的字符

硬件平臺:華清遠見FS-MP1A開發板(STM32MP157)
部分開發教程下載:加QQ群寫在前面:
本文章為《ARM Cortex-M4裸機開發篇》系列中的一篇,,全系列總計14篇。筆者使用的開發平臺為華清遠見FS-MP1A開發板(STM32MP157開發板),Cortex-M4裸機開發篇除了講M4裸機開發外,還會講解通過M4控制資源擴展板上的各種傳感器執行器模塊(包括空氣溫濕度傳感器、LED燈、數碼管、蜂鳴器、震動馬達、按鍵中斷、風扇等),本篇是M4控制資源擴展板中的一篇。
資源擴展板是FS-MP1A開發板的擴展模塊,主要包含了10余種助主流傳感器、執行器件、總線控制器件,非常方便項目擴展用。可拓展開發智慧家庭、智能醫療、智能安防、工業控制、圖像識別、環境檢測等方向的10個左右綜合項目,華清遠見開發板也將配套提供所有項目的說明文檔、實驗源碼、應用程序等資料。
針對FS-MP1A開發板,除了Cortex-M4裸機開發篇外,還包括其他多系列教程,包括Cortex-A7開發篇、FreeRTOS篇、Linux基礎及應用開發篇、Linux系統移植篇、Linux驅動開發篇、硬件設計篇、人工智能機器視覺篇、Qt應用編程篇、Qt綜合項目實戰篇等。622457259672
資源擴展板介紹
硬件介紹&資源擴展板可開發項目
Cortex-M4 串行通訊接口
實驗目的
熟悉STM32CubeIDE工具軟件的使用。
掌握STM32CubeIDE軟件的基本設計流程和設計步驟,能夠使用工具進行設計、編程、仿真調試。
學習UART串口的使用方法,掌握如何利用STM32MP157A芯片的串口輸入輸出。
實驗環境
FS-MP1A開發平臺
ST-Link仿真器
STM32CubeIDE開發軟件
PC機 XP、Window7/10 (32/64bit)
串口調試工具
實驗原理
串口是計算機上一種非常通用設備通信的協議(不要與通用串行總線Universal Serial Bus 或者USB 混淆)。大多數計算機包含兩個基于RS232 的串口。串口同時也是儀器儀表設備通用的通信協議;很多GPIB(通用接口總線)兼容的設備也帶有RS-232 口。同時,串口通信協議也可以用于獲取遠程采集設備的數據。
串口通信的概念非常簡單,串口按位(bit)發送和接收字節。盡管比按字節(byte)的并行通信慢,但是串口可以在使用一根線發送數據的同時用另一根線接收數據。它很簡單并且能夠實現遠距離通信。典型地,串口用于ASCII碼字符的傳輸。通信使用3根線完成:(1)地線,(2)發送,(3)接收。由于串口通信是異步的,端口能夠在一根線上發送數據同時在另一根線上接收數據。其他線用于握手,但是不是必須的。串口通信最重要的參數是波特率、數據位、停止位和奇偶校驗。
對于兩個進行通行的端口,這些參數必須匹配:
波特率:這是一個衡量通信速度的參數。它表示每秒鐘傳送的bit的個數。例如300波特表示每秒鐘發送300個bit。當我們提到時鐘周期時,我們就是指波特率例如如果協議需要4800波特率,那么時鐘是4800Hz。這意味著串口通信在數據線上的采樣率為4800Hz。通常電話線的波特率為14400,28800和36600。波特率可以遠遠大于這些值,但是波特率和距離成反比。高波特率常常用于放置的很近的儀器間的通信,典型的例子就是GPIB設備的通信。
數據位:這是衡量通信中實際數據位的參數。當計算機發送一個信息包,實際的數據不會是8位的,標準的值是5、7和8位。如何設置取決于你想傳送的信息。比如,標準的ASCII碼是0~127(7位)。擴展的ASCII碼是0~255(8位)。如果數據使用簡單的文本(標準ASCII碼),那么每個數據包使用7位數據。每個包是指一個字節,包括開始/停止位,數據位和奇偶校驗位。由于實際數據位取決于通信協議的選取,術語“包”指任何通信的情況。
停止位:用于表示單個包的最后一位。典型的值為1 ,1.5和2位。這里的1.5位的數據寬度,就是1.5個波特率,由于數據是在傳輸線上定時的,并且每一個設備有其自己的時鐘,很可能在通信中兩臺設備間出現了小小的不同步。因此停止位不僅僅是表示傳輸的結束,并且提供計算機校正時鐘同步的機會。適用于停止位的位數越多,不同時鐘同步的容忍程度越大,但是數據傳輸率同時也越慢。
奇偶校驗位:在串口通信中一種簡單的檢錯方式。有四種檢錯方式:偶、奇、高和低。當然沒有校驗位也是可以的。對于偶和奇校驗的情況,串口會設置校驗位(數據位后面的一位),用一個值確保傳輸的數據有偶個或者奇個邏輯高位。例如,如果數據是011,那么對于偶校驗,校驗位為0,保證邏輯高的位數是偶數個。如果是奇校驗,校驗位位1 ,這樣就有3個邏輯高位。高位和低位不真正的檢查數據,簡單置位邏輯高或者邏輯低校驗。這樣使得接收設備能夠知道一個位的狀態,有機會判斷是否有噪聲干擾了通信或者是否傳輸和接收數據是否不同步.
硬件流控制: 硬件流控制常用的有RTS/CTS流控制和DTR/ R(數據終端就緒/數據設置就緒)流控制。硬件流控制必須將相應的電纜線連上,用RTS/CTS(請求發送/清除發送)流控制時,應將通訊兩端的RTS、CTS線對應相連,數據終端設備(如計算機)使用RTS來起始調制解調器或其它數據通訊設備的數據流,而數據通訊設備(如調制解調器)則用CTS來起動和暫停來自計算機的數據流。這種硬件握手方式的過程為:我們在編程時根據接收端緩沖區大小設置一個高位標志(可為緩沖區大小的75%)和一個低位標志(可為緩沖區大小的25%),當緩沖區內數據量達到高位時,我們在接收端將CTS線置低電平(送邏輯0),當發送端的程序檢測到CTS為低后,就停止發送數據,直到接收端緩沖區的數據量低于低位而將CTS置高電平。RTS則用來標明接收設備有沒有準備好接收數據。
常用的流控制還有還有DTR/ R(數據終端就緒/數據設置就緒)。我們在此不再詳述。
STM32串口設置一般可以總結為如下幾個步驟:
- 串口時鐘使能,GPIO時鐘使能
- 設置引腳復用映射
- GPIO初始化設置,模式為復用功能
- 串口參數初始化:設置波特率,字長,奇偶校驗等參數
- 開啟中斷并初始化NVIC,使能中斷(如果需要開啟中斷才需要這個步驟)
- 使能串口
- 編寫中斷處理函數
串口硬件原理圖:
HAL庫函數解析:
HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
這兩個函數是輪詢方式發送和接收
HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
這兩個函數是以中斷方式發送和接收。具體傳參詳見工程。
注意:這兩個函數里為指定緩沖區和大小并開啟中斷。實際上數據還在中斷里處理
HAL庫提供了用戶中斷處理函數方式,是調用回調函數。
接收中斷在用戶代碼里重定義void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
發送中斷在用戶代碼里重定義void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart);
實驗步驟
打開STM32CubeIDE->File->New->STM32 Project
可以在左側搜索框內輸入芯片型號STM32MP157A進行搜索,選擇對應芯片,點擊Next
填寫工程名,點擊Finsh
點擊Yes打開配置頁面
配置UART4,勾選Cortex-M4,Mode選擇Asynchronous,NVIC Settings 勾選Enabled使能串口中斷,搜索框搜索PB2、PG11,分別配置為UART4_RX、UART4_TX
在Code Generator處選擇為每個外設生成單獨的C和H文件,這樣設置方便閱讀代碼
完成以上設置后,Ctrl+S保存,會提示是否需要生成代碼,選擇Yes即可自動生成代碼。系統會自動生成System Clock代碼
可以在左側工程文件夾找到UART_CM4子工程,打開main.c
添加串口中斷回調函數HAL_UART_RxCpltCallback
| 12345 | void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){ HAL_UART_Transmit(&huart4, Buff, 5, 100);} |
在主函數中調用串口中斷接收函數 HAL_UART_Receive_IT(&huart4, Buff, 5);
上述為新建工程配置過程,可參考12.3.2章節進行導入已有工程,工程存放路徑【華清遠見-FS-MP1A開發資料\02-程序源碼\ARM體系結構與接口技術\Cortex-M4\4_UART】
配置完成或導入工程后進行程序下載,具體步驟參考12.3.3節進行開發板連接,程序編譯、下載
實驗現象
連接串口線,打開串口調試助手,選擇串口號,波特率115200,打開串口,發送5個字符,可以看到也成功接收到發送的字符
-
單片機
+關注
關注
6076文章
45495瀏覽量
670376 -
嵌入式
+關注
關注
5198文章
20449瀏覽量
334064 -
Linux
+關注
關注
88文章
11760瀏覽量
219036 -
STM32
+關注
關注
2309文章
11162瀏覽量
373458 -
開發板
+關注
關注
26文章
6291瀏覽量
118120
發布評論請先 登錄
【遠程/外協】尋求嵌入式 Linux 高手:解決 STM32MP135 PTP 授時與 SPI 高速通訊瓶頸
STM32MP257F-EV1評估板深度解析與技術應用指南
?STM32MP257F-DK探索套件技術解析與應用指南
在NuMicro? Cortex M0/M4系列中使用SWD(串行線調試)時,為什么進入掉電模式后功耗不會降低呢?
stm32H745 M4核不能調試和下載怎么解決?
使用STM32CubeIDE調試STM32MP157D的M4內核時報了下圖這個錯誤,怎么解決?
【正點原子STM32MP257開發板試用】介紹、上電測試、系統連接
STM32F3系列、STM32F4系列、STM32L4系列和STM32L4+系列Cortex-M4編程手冊
【米爾-STM32MP257開發板試用體驗】初次體驗米爾-STM32MP257開發板
使用STM32CubeIDE調試STM32MP157D的M4內核時報了錯誤怎么解決?
ST×米爾STM32MP25x高階實戰培訓會



 工商網監
工商網監
評論