 平頭哥CDK助力中科昊芯HX2000系列芯片之雙電機有感FOC控制系統專題(四)拓展:永磁電機三閉環有感伺服控制
平頭哥CDK助力中科昊芯HX2000系列芯片之雙電機有感FOC控制系統專題(四)拓展:永磁電機三閉環有感伺服控制

自中科昊芯推出專題闡述HXS320F28034雙電機有感FOC控制系統實現以來,第一期主要分析了雙電機有感FOC控制原理,第二期著重分析了永磁BLDC的霍爾位置開環控制,第三期著重分析了永磁BLDC的雙閉環調速,第四期著重分析了永磁PMSM雙閉環FOC調速,本期基于上期的方案做了一個拓展,增加了位置閉環優化,實現永磁電機三閉環有感伺服控制,并繼續基于平頭哥半導體有限公司的劍池集成開發環境(簡稱“CDK”)V2.12.1版本與HXS320F28034驅動一體板聯合開發。
PMSM三閉環有感伺服原理如圖1,系統給定位置θ*與差分增量式編碼器計算所得實際角度位置θ相比較,經位置PI運算得到給定轉速n*,與差分增量式編碼器計算所得實際轉速nfbk相比較,經速度PI運算得到q軸電流給定值iq*,采用id*=0控制,與霍爾電流采樣得到三相實際電流ia,ib,ic,經CLARK與PARK變換所得d軸與q軸電流id,iq進行比較,經電流PI輸出調節電壓Ud*,Uq*,經反PARK變換得到調節電壓Uα*,Uβ*,經空間矢量脈寬調制SVPWM輸出三路開關管切換時間Tcm1,Tcm2,Tcm3,與三路PWM輸出三角載波相比較得到六路調制脈寬,驅動控制三相六橋臂MOSFET逆變器通斷,實現三閉環伺服的位置精確控制。
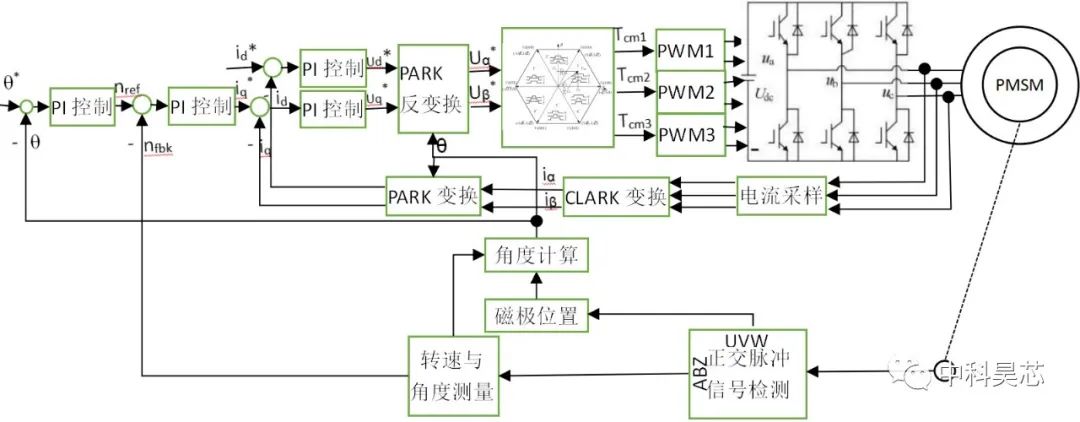
圖1 PMSM三閉環有感伺服系統框圖
依照上述原理,設計HXS320F28034 PMSM三閉環有感伺服系統如圖2,通過GPIO按鍵控制電機使能與位置給定,轉子位置與速度檢測通過QEP模塊實現,電流采樣通過ADC模塊實現,經三閉環PI調節輸出PWM波的導通脈寬,從而實現電機角度位置的精確伺服控制。硬件連接如圖3,圖中的小黑色電路板為差分編碼轉換器,讀者可根據需要自行采購。
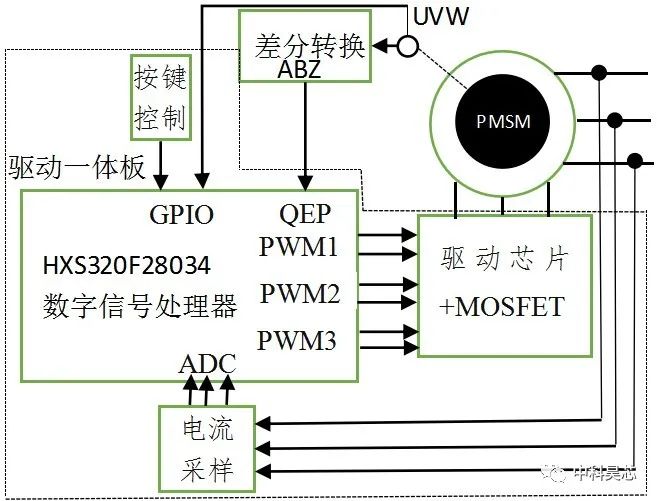
圖2 系統硬件原理圖

圖3 系統硬件連接
系統所采用的軟硬件開發環境詳見《芯教程丨平頭哥CDK助力中科昊芯HX2000系列芯片之雙電機有感FOC控制系統專題(一)》。
根據上述分析,基于CDK開發PMSM三閉環有感伺服系統,代碼包括:PWM、QEP的外設GPIO引腳配置、三路三相PWM波輸出配置,QEP初始化配置與差分編碼器位置采樣、轉速與電角度計算、ADC初始化配置與電流采樣、PMSM斜坡啟動編碼器校正、PI調節算法、CLARK、PARK正逆變換、SVPWM算法調制的EPWM事件觸發中斷服務程序,主程序執行調用,其中SVPWM算法調制的EPWM事件觸發中斷服務程序代碼為:
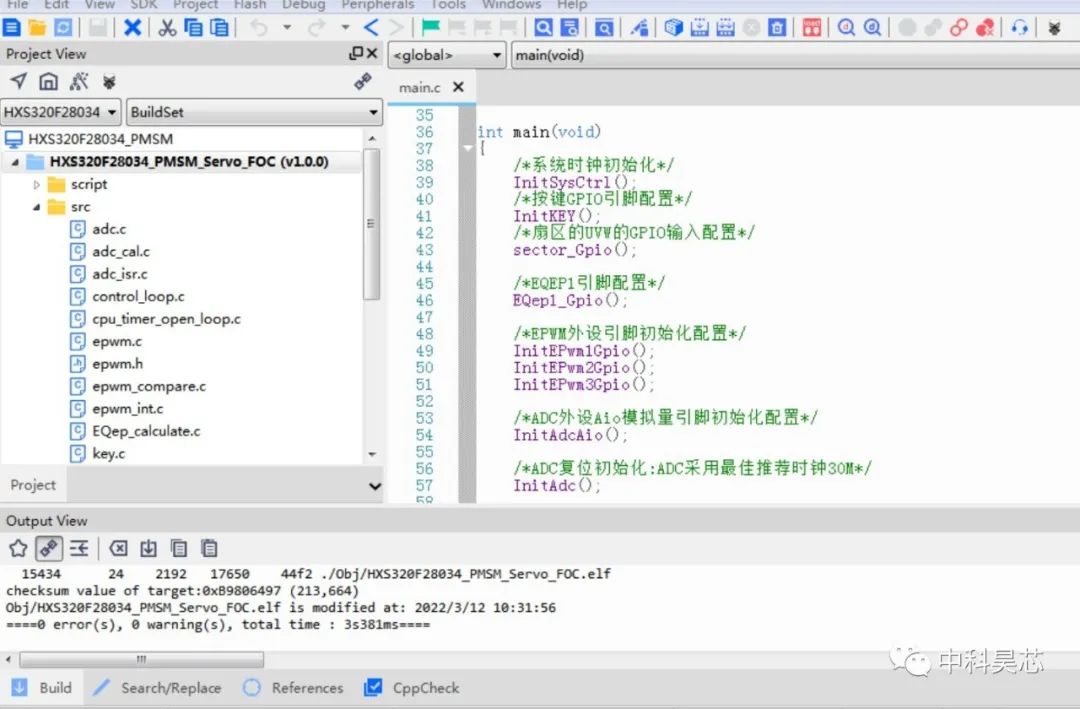
1.voidINTERRUPTepwm1_isr(void)2.{3./*出于安全考慮,默認驅動板上電時封波,按下GPIO7后,電機開始啟動*/4.if(GpioDataRegs.GPADAT.bit.GPIO7==0)5.{6.epwm_flag++;7.}8./*判斷啟動脈沖信號是否產生,產生后電機開始啟動*/9.if(epwm_flag!=0)10.{11./*啟動計時*/12.start_step++;13./*扇區讀取:用于獲取確定的轉子初始位置與對應的SVPWM初始扇區*/14.sector_uvw();15./*斜坡啟動與調速:200rpm斜坡加速啟動后調速,300個計數內完成啟動*/16.if((speed_ref1<300)&&(start_step<=300))17.{18./*斜坡啟動*/19.start_ramp();20.}21.else22.{if((speed_add!=0)||(speed_sub!=0))23.{24./*按計數,分配在不同時段實現調速與轉子位置伺服控制*/25.speed_theta_regulated();26.if(theta_reg<250000)27.{/*調速*/28.speed_regulated();29.}30.else31.{/*角度調整*/32.theta_regulated();33./*位置閉環*/34.servo_loop();35.}36.}37.}38./*轉速閉環*/39.speed_loop();40./*電流閉環*/41.current_loop();42./*給定固定初始角度使電機轉過最大反電勢點,讀取校正值=此時脈沖計數*/43.theta=theta_open;44./*根據差分編碼器的霍爾信號判斷電機反電勢是否處于最大值*/45.if(theta==NA*_IQ7(PI/3)+_IQ7(PI/6))46.{47.iel_int++;48.}49./*反電勢最大時,切電角度閉環,使編碼器零位與電機零位對齊,完成啟動*/50.if(iel_int!=0)51.{52./*計算電角度*/53.theta=freq*_IQ7(2*PI);54.}55./*兩相旋轉坐標系變換到兩相靜止坐標系*/56.iPark();57./*空間矢量旋轉變換*/58.svpwm_motor();59./*調制占空比輸出配置*/60.epwm_compare();61.}62./*清除事件中斷的INT全局中斷*/63.EPwm1Regs.ETCLR.bit.INT=1;64./*中斷應答,鎖定IER的第3組中斷向量*/65.PieCtrlRegs.PIEACK.all=PIEACK_GROUP3;66.}CDK上開發PMSM三閉環有感伺服系統控制程序,其編譯結果為:
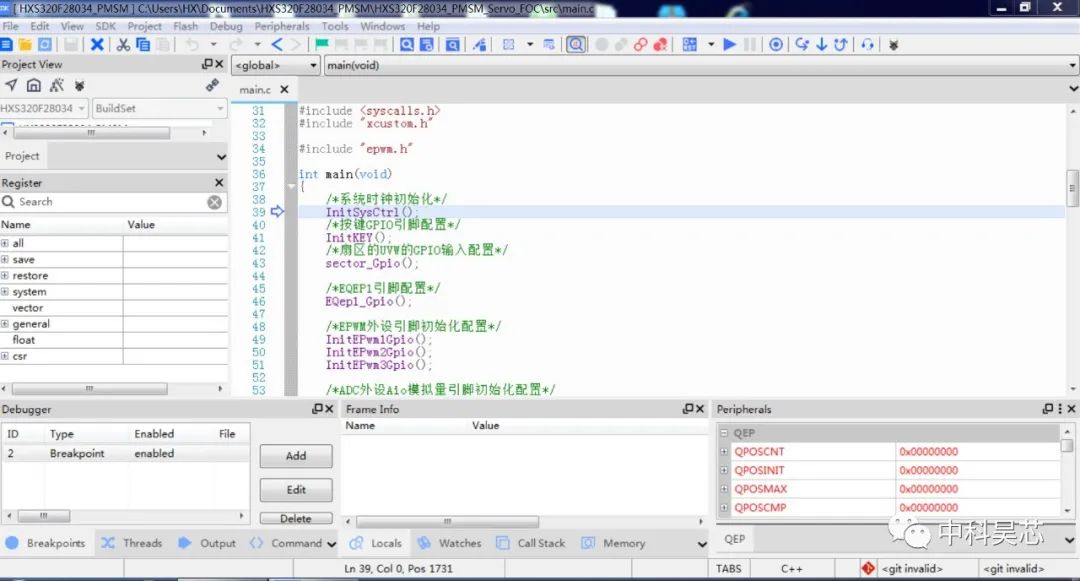
編譯通過后,可以開始調試,其調試結果如下:
調試后,控制PMSM在400rpm~600rpm調速與調節轉子位置的效果如下:

關于中科昊芯
“智由芯生 創享未來”,中科昊芯是數字信號處理器專業供應商。作為中國科學院科技成果轉化企業,瞄準國際前沿芯片設計技術,依托多年積累的雄厚技術實力及對產業鏈的理解,以開放積極的心態,基于開源指令集架構RISC-V,打造多個系列數字信號處理器產品,并構建完善的處理器產品生態系統。產品具有廣闊的市場前景,可廣泛應用于工業控制及電機驅動、數字電源、光伏、儲能、新能源汽車、消費電子、白色家電等領域。
-
控制系統
+關注
關注
41文章
6955瀏覽量
114103
發布評論請先 登錄
人形機器人關節電機:永磁電機類型解析


MT6835磁編芯片助力閉環步進電機控制系統進入新時代
永磁電機的充磁方向如何選擇?
攻克FOC電機控制!257集系統課+STM32開發套件,從理論到實戰閉環學習




 工商網監
工商網監
評論