") 什么是IMU(慣性傳感器)
什么是IMU(慣性傳感器)

?
近兩年來,車聯(lián)網(wǎng)、自動(dòng)駕駛、無人駕駛、汽車智能化、網(wǎng)聯(lián)化等成為了汽車行業(yè)的熱點(diǎn)話題,未來汽車一定是朝著安全、可靠及舒適的方向發(fā)展。而這一切背后的發(fā)展都離不開傳感器的作用,今天我們就來聊聊用途越來越廣的慣性傳感器——IMU。
一、慣性傳感器(IMU)簡(jiǎn)介
IMU全稱Inertial Measurement Unit,慣性測(cè)量單元,主要用來檢測(cè)和測(cè)量加速度與旋轉(zhuǎn)運(yùn)動(dòng)的傳感器。其原理是采用慣性定律實(shí)現(xiàn)的,這些傳感器從超小型的的MEMS傳感器,到測(cè)量精度非常高的激光陀螺,無論尺寸只有幾個(gè)毫米的MEMS傳感器,到直徑幾近半米的光纖器件采用的都是這一原理。
?

最基礎(chǔ)的慣性傳感器包括加速度計(jì)和角速度計(jì)(陀螺儀),他們是慣性系統(tǒng)的核心部件,是影響慣性系統(tǒng)性能的主要因素。尤其是陀螺儀其漂移對(duì)慣導(dǎo)系統(tǒng)的位置誤差增長的影響是時(shí)間的三次方函數(shù)。而高精度的陀螺儀制造困難,成本高昂。因此提高陀螺儀的精度、同時(shí)降低其成本也是當(dāng)前追求的目標(biāo)。
陀螺儀的發(fā)展趨勢(shì):

?
?

?
隨著微電子技術(shù)的發(fā)展,出現(xiàn)了新型的慣性傳感器微機(jī)械陀螺儀和加速度計(jì)。MEMS(Micro-Electro-Mechanical System,微機(jī)電系統(tǒng)/微電子機(jī)械系統(tǒng))技術(shù)傳感器也逐漸演變成為汽車傳感器的主要部件。本文這里重點(diǎn)介紹MEMS的六軸慣性傳感器。它主要由三個(gè)軸加速度傳感器及三個(gè)軸的陀螺儀組成。
二、MEMS慣性傳感器分級(jí)、組成及原理
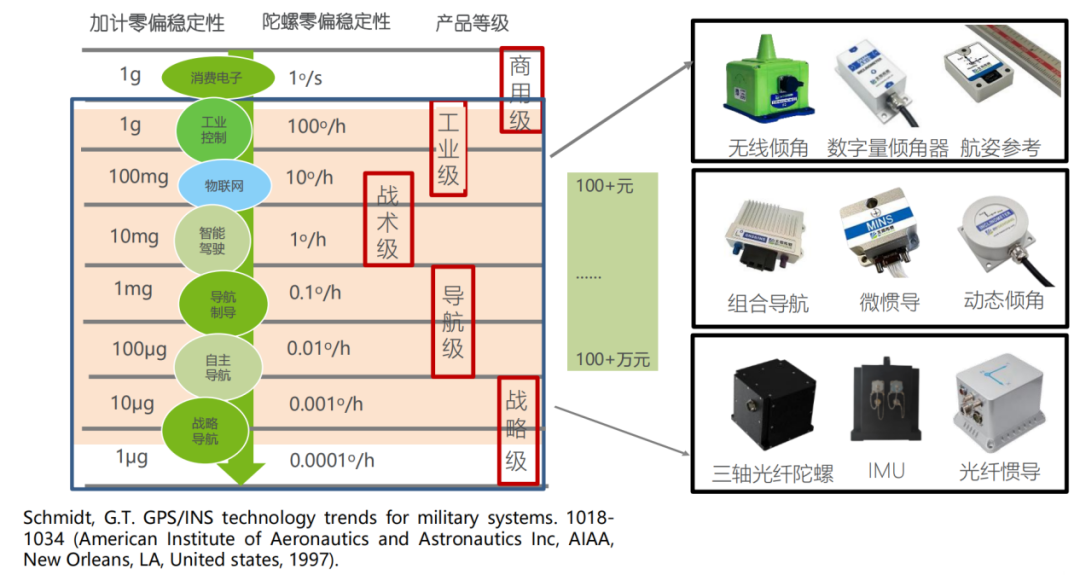
1、MEMS慣性傳感器分級(jí)

?
目前不管是傳統(tǒng)汽車還是自動(dòng)駕駛汽車用的慣性傳感器通常是中低級(jí)的,其特點(diǎn)是更新頻率高(通常為:1kHz),可提供實(shí)時(shí)位置信息。但它有個(gè)致命的缺點(diǎn)——他的誤差會(huì)隨著時(shí)間的推進(jìn)而增加,所以只能在很短的時(shí)間內(nèi)依賴慣性傳感器進(jìn)行定位。通常在自動(dòng)駕駛車輛中與GNSS(全球?qū)Ш叫l(wèi)星系統(tǒng))配合一起使用,稱為組合慣導(dǎo)。
2、MEMS慣性傳感器組成及原理
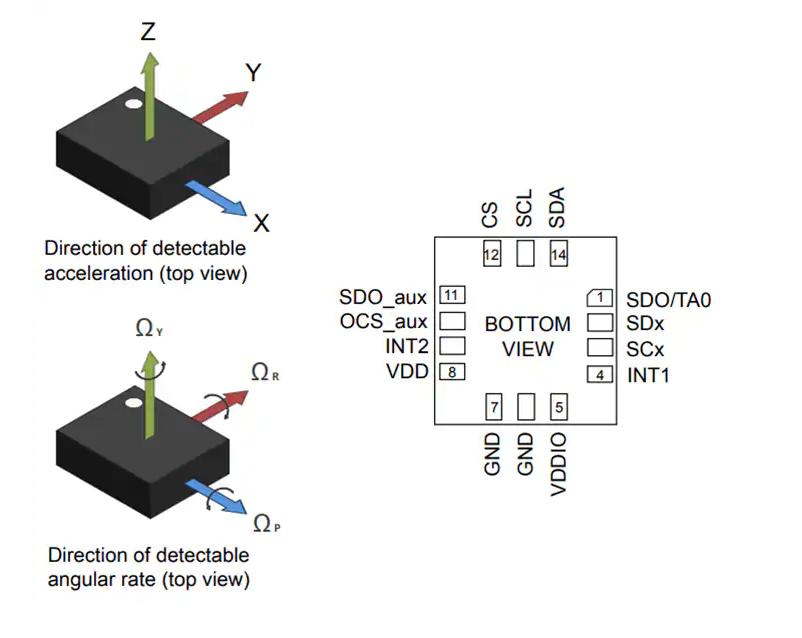
慣性傳感器是對(duì)物理運(yùn)動(dòng)做出反應(yīng)的器件,如線性位移或角度旋轉(zhuǎn),并將這種反應(yīng)轉(zhuǎn)換成電信號(hào),通過電子電路進(jìn)行放大和處理。加速度計(jì)和陀螺儀是最常見的兩大類MEMS慣性傳感器。加速度計(jì)是敏感軸向加速度并轉(zhuǎn)換成可用輸出信號(hào)的傳感器;陀螺儀是能夠敏感運(yùn)動(dòng)體相對(duì)于慣性空間的運(yùn)動(dòng)角速度的傳感器。三個(gè)MEMS加速度計(jì)和三個(gè)MEMS陀螺儀組合形成可以敏感載體3個(gè)方向的線加速度和3個(gè)方向的加速度的微型慣性測(cè)量組合(Micro Inertial Messurement Unit,MIMU),慣性微系統(tǒng)利用三維異構(gòu)集成技術(shù),將MEMS加速度計(jì)、陀螺儀、壓力傳感器、磁傳感器和信號(hào)處理電路等功能零件集成在硅芯片內(nèi),并內(nèi)置算法,實(shí)現(xiàn)芯片級(jí)制導(dǎo)、導(dǎo)航、定位等功能。
(1)MEMS加速度計(jì)
MEMS加速度計(jì)是MEMS領(lǐng)域最早開始研究的傳感器之一。經(jīng)過多年的發(fā)展,MEMS加速度計(jì)的設(shè)計(jì)和加工技術(shù)已經(jīng)日趨成熟。

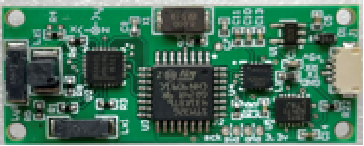
?
上圖為MEMS加速度計(jì),它的工作原理就是靠MEMS中可移動(dòng)部分的慣性。由于中間電容板的質(zhì)量很大,而且它是一種懸臂構(gòu)造,當(dāng)速度變化或者加速度達(dá)到足夠大時(shí),它所受到的慣性力超過固定或者支撐它的力,這時(shí)候它會(huì)移動(dòng),它跟上下電容板之間的距離就會(huì)變化,上下電容就會(huì)因此變化。電容的變化跟加速度成正比。根據(jù)不同測(cè)量范圍,中間電容板懸臂構(gòu)造的強(qiáng)度或者彈性系數(shù)可以設(shè)計(jì)得不同。還有如果要測(cè)量不同方向的加速度,這個(gè)MEMS的結(jié)構(gòu)會(huì)有很大的不同。電容的變化會(huì)被另外一塊專用芯片轉(zhuǎn)化成電壓信號(hào),有時(shí)還會(huì)把這個(gè)電壓信號(hào)放大。電壓信號(hào)在數(shù)字化后經(jīng)過一個(gè)數(shù)字信號(hào)處理過程,在零點(diǎn)和靈敏度校正后輸出。
加速度計(jì)還有一個(gè)自測(cè)試功能。當(dāng)它剛通電時(shí),邏輯控制會(huì)向自測(cè)試電路發(fā)出命令。自測(cè)試電路產(chǎn)生一個(gè)直流電壓加載到MEMS芯片的自測(cè)試電路板上,中間可活動(dòng)電容板就會(huì)因靜電吸引而下移。接下來的處理過程跟測(cè)試真的加速度一樣。
目前,國外眾多研究機(jī)構(gòu)和慣性器件廠商都開展了MEMS加速度計(jì)技術(shù)研究,如美國的Draper實(shí)驗(yàn)室、Michigan大學(xué)、加州大學(xué)Berkley分校、瑞士Neuchatel大學(xué)、美國Northrop Grumman Litton公司、Honeywell公司、ADI、Silicon Designs、Silicon Sensing、Endevco公司、瑞士的Colibrys公司、英國的BAE公司等。
其中,以Draper實(shí)驗(yàn)室為代表的研究機(jī)構(gòu)和大學(xué)的主要工作在于提升MEMS加速度計(jì)的技術(shù)指標(biāo)。能夠提供實(shí)用化MEMS加速度計(jì)產(chǎn)品的主要廠家有ADI、Silicon Designs、Silicon Sensing、Endevco和瑞士的Colibrys公司。
(2)MEMS陀螺儀角速度計(jì)
自20世紀(jì)80年代以來,對(duì)角速率敏感的MEMS陀螺儀角速度計(jì)受到越來越多的關(guān)注。根據(jù)性能指標(biāo),MEMS陀螺儀同樣可以分為三級(jí):速率級(jí)、戰(zhàn)術(shù)級(jí)和慣性級(jí)。速率級(jí)陀螺儀可用于消費(fèi)類電子產(chǎn)品、手機(jī)、數(shù)碼相機(jī)、游戲機(jī)和無線鼠標(biāo);戰(zhàn)術(shù)級(jí)陀螺儀適用于工業(yè)控制、智能汽車、火車、汽船等領(lǐng)域;慣性級(jí)陀螺儀可用于衛(wèi)星、航空航天的導(dǎo)航、制導(dǎo)和控制。

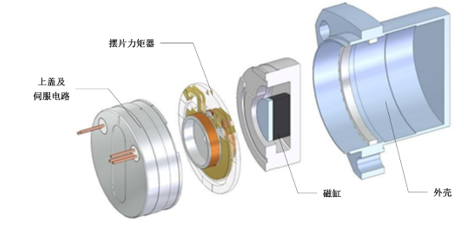
?
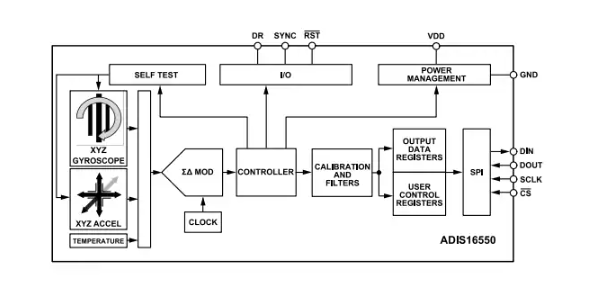
上圖為MEMS陀螺儀角速度計(jì)(MEMS gyroscope),其工作原理是利用角動(dòng)量守恒原理及科里奧效應(yīng)測(cè)量運(yùn)動(dòng)物體的角速率。它主要是一個(gè)不停轉(zhuǎn)動(dòng)的物體,它的轉(zhuǎn)軸指向不隨承載它的支架的旋轉(zhuǎn)而變化。
與加速度計(jì)工作原理相似,陀螺儀的上層活動(dòng)金屬與下層金屬形成電容。當(dāng)陀螺儀轉(zhuǎn)動(dòng)時(shí),他與下面電容板之間的距離機(jī)會(huì)發(fā)生變化,上下電容也就會(huì)因此而改變。電容的變化跟角速度成正比,由此我們可以測(cè)量當(dāng)前的角速度。
據(jù)不完全統(tǒng)計(jì),研究MEMS陀螺儀的機(jī)構(gòu)如下:斯坦福大學(xué)、密歇根大學(xué)、加州大學(xué)伯克利分校、歐文、洛杉磯、中東技術(shù)大學(xué)、弗萊堡大學(xué)、南安普敦大學(xué)、首爾國立大學(xué)、根特大學(xué)、清華大學(xué)、北京大學(xué)、東南大學(xué)、上海交通大學(xué)、浙江大學(xué)、博世、ST、InvenSense、NXP、ADI、TI等。
(3)慣性傳感器的誤差問題
由于制作工藝的原因,慣性傳感器測(cè)量的數(shù)據(jù)通常都會(huì)有一定誤差。第一種誤差是偏移誤差,也就是陀螺儀和加速度計(jì)即使在沒有旋轉(zhuǎn)或加速的情況下也會(huì)有非零的數(shù)據(jù)輸出。要想得到位移數(shù)據(jù),我們需要對(duì)加速度計(jì)的輸出進(jìn)行兩次積分。在兩次積分后,即使很小的偏移誤差會(huì)被放大,隨著時(shí)間推進(jìn),位移誤差會(huì)不斷積累,最終導(dǎo)致我們沒法再跟蹤物體的位置。第二種誤差是比例誤差,所測(cè)量的輸出和被檢測(cè)輸入的變化之間的比率。與偏移誤差相似,在兩次積分后,隨著時(shí)間推進(jìn),其造成的位移誤差也會(huì)不斷積累。第三種誤差是背景白噪聲,如果不給予糾正,也會(huì)導(dǎo)致我們沒法再跟蹤物體的位置。
三、慣性傳感器應(yīng)用
慣性傳感器能夠?yàn)檐囕v中的所有控制單元提供車輛的即時(shí)運(yùn)動(dòng)狀態(tài)。路線偏移,縱向橫向的擺動(dòng)角速度,以及縱向、橫向和垂直加速度等信號(hào)被準(zhǔn)確采集,并通過標(biāo)準(zhǔn)接口傳輸至數(shù)據(jù)總線。所獲得的信號(hào)用于復(fù)雜的調(diào)節(jié)算法,以增強(qiáng)乘用車和商用車(例如,ESC/ESP、ADAS、AD)以及摩托車(優(yōu)化的曲線 ABS)、工業(yè)車輛和農(nóng)用車的舒適性與安全應(yīng)用,如下圖示。

?
在無人車方面的應(yīng)用多與GPS或者GNSS組合使用,如下圖示:

?
四、MEMS慣性傳感器的發(fā)展
未來MEMS慣性傳感器的發(fā)展主要有四個(gè)方向:
1、高精度
導(dǎo)航、自動(dòng)駕駛和個(gè)人穿戴設(shè)備等對(duì)慣性傳感器的精度需求逐漸提高,精細(xì)化測(cè)量需求和智能化的發(fā)展也對(duì)傳感器的精度提出了越來越高的要求。
2、微型化
器件的微型化可以實(shí)現(xiàn)設(shè)備便攜性,滿足分布式應(yīng)用要求。微型化是未來智能傳感設(shè)備的發(fā)展趨勢(shì),是實(shí)現(xiàn)萬物互聯(lián)的基礎(chǔ)。
3、高集成度
無論是慣性測(cè)量單元還是慣性微系統(tǒng)都是為了提高器件的集成度,進(jìn)而實(shí)現(xiàn)在更小的體積內(nèi)具備更多的測(cè)量功能,滿足裝備小體積、低功耗、多功能的需求。
4、適應(yīng)性強(qiáng)
隨著MEMS慣性傳感器的應(yīng)用范圍越來越廣泛,工作環(huán)境也會(huì)越來越復(fù)雜,例如:高溫、高壓、大慣量和高沖擊等,適應(yīng)復(fù)雜環(huán)境能夠進(jìn)一步拓寬MEMS慣性傳感器的應(yīng)用范圍。
-
傳感器
+關(guān)注
關(guān)注
2576文章
55040瀏覽量
791276 -
慣性傳感器
+關(guān)注
關(guān)注
2文章
195瀏覽量
29353
發(fā)布評(píng)論請(qǐng)先 登錄
愛普生高精度IMU M-G570PR:多傳感器融合技術(shù)賦能工業(yè)級(jí)精準(zhǔn)定位
IMU應(yīng)用領(lǐng)域及技術(shù)前景探討
填補(bǔ)國產(chǎn)高端傳感器空白!中國首款全數(shù)字伺服電路石英加計(jì)落地!天羿領(lǐng)航推動(dòng)高精度慣性測(cè)量技術(shù)邁入“
IMU+多相機(jī)高速聯(lián)合自動(dòng)標(biāo)定方案
ISM6HG256X智能慣性測(cè)量單元(IMU)技術(shù)解析
導(dǎo)遠(yuǎn)科技車規(guī)級(jí)MEMS IMU芯片獲自主可控認(rèn)定

MEMS慣性傳感器?都有哪些種類?MEMS慣性傳感器有哪些特點(diǎn)
國產(chǎn)前20家MEMS慣性傳感器廠商匯總,火豐精密入選榜單

A股力傳感器龍頭柯力傳感再投資一家慣性傳感器公司無錫北微傳感科技有限公司
使用高精度IMU對(duì)無人機(jī)系統(tǒng)有何提升?
博世推出首款高性能六軸慣性傳感器
Analog Devices Inc. ADIS16550六自由度慣性傳感器數(shù)據(jù)手冊(cè)
Bosch Sensortec最新推出BMI330慣性測(cè)量單元
博世MEMS傳感器的應(yīng)用領(lǐng)域



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論