 【虹科】三維點云建模:迎來復原歷史建筑的新紀元
【虹科】三維點云建模:迎來復原歷史建筑的新紀元

關于虹科智能感知虹科智能感知事業部專注于智能感知與機器視覺領域,已經和IDS,Blickfeld和Gidel等有著重要地位的國際公司展開深度的技術合作。我們的解決方案包括3D激光雷達,工業相機,視覺處理平臺,圖像采集卡及視覺系統集成等。虹科的工程師積極參與國內外專業協會和聯盟的活動,我們非常重視技術培訓和積累,公司定期與國內外專家團隊進行交流和培訓。虹科合作伙伴PointFuse的特邀作者Mark 介紹點云數據如何復原歷史建筑。為了確保在各學科之間的平滑協作,減少和處理點云數據的大小至關重要。Mark解釋了如何輕松完成這一工作,并準確地復原建筑物的細節部分。2019年4月巴黎圣母院大教堂被燒毀,整個世界只能驚恐地看著。塔樓標志性的尖頂消失了,教堂大部分木質框架也消失了,這些木框是在一千年前由51英畝的森林建成的。沒有足夠的木材或足夠高的樹木來取代框架,但這并不全是壞消息:一位熱心的歷史學家Andrew Tallon的努力,采集一片超過10億個數據點的點云,映射出大教堂在2010年火災前的情況。在對圣母院的熱情激勵下,Tallon開始捕捉它的所有美麗。他使用安裝在三腳架上的激光掃描儀,拍攝建筑的每個面——有時甚至將自己的安全問題放在一邊,攀爬高臺。他還拍攝了全景彩色照片,并將RGB數據保存到點云中。目前,復原工作正在全面展開,結合當代建筑和傳統建筑的特色,如果最終的設計能超過1160年原始框架,那將是非常美妙的。如果真的如此,這將部分歸功于點云,以及十多年后最先進的點云制圖軟件,以一種可供建筑師、工程師和復原師使用的方式解析數據。
采用點云格式的優勢
可以使用公式描述數學對象;建筑師的圖紙提供了一個建筑物的結構視圖;照片可以捕捉到一個古老建筑物的美。但是,這些都無法捕捉到一座建筑隨時間風化、老化的所有細節和細微差別。 點云捕捉物體或建筑中每一個點的X、Y、Z坐標。這不僅僅意味著每一塊磚都被捕捉和記錄下來,而且能把每一個凹陷、凹痕和窩點記錄下來。背景信息,如RGB數據,有助于形成一個信息庫,建立精細的3D模型。過去,模型是由專業的CAD技術人員手工建立的,但現在這個過程可以通過專業軟件自動完成,利用點云和掃描過程中捕獲的所有數據,虛擬地構建一個真實的建筑副本。下面是還原敘利亞阿勒頗瀕臨滅絕的遺產地Beit Ghazeleh的視頻,是使用專業的點云CAD軟件從一個采集了12億個數據點的樣本中構建的。
來自Beit Ghazaleh,采用高精度三維激光掃描儀測繪(12億個數據點)——敘利亞阿勒頗的一處瀕危遺產地。這是一項多方合作的科學工作,以研究、保護和緊急加固該遺跡。困難和挑戰
點云可以存儲歷史建筑微小部分的細節,以便于在未來的某個時刻完整重現——這就像捕捉和保存它的DNA。但是,記錄細節也帶來了很大的缺點:文件很大,使得保存、分享和使用它們變得非常困難。它還需要很多技術來確定這些點實際代表什么,并將這些點連接起來——即便如此,人為的錯誤也會帶來不準確的結果。而且你會希望來自不同學科的人可以同一個數據上工作,所以能在不同的團隊和軟件包中無縫使用是至關重要的。云解決方案允許用戶訪問文件的單一副本,并確保他們是在使用最新的版本。訪問協議確保在任何時候只有一個用戶可以保存更改。這些問題在任何大規模的建筑項目中都很常見,但復原工作帶來了額外的挑戰:如何捕捉災難發生前建筑的"原狀",而不僅僅是它現在的樣子。當然,我們不可能穿越時空去獲得 "當時 "的畫面,但我們能做的是讓檔案員的工作變得更容易,現在的軟件使用起來更簡單,所以采集建筑物的數據是可以定期進行的。網狀結構:每一個點都有關系
宇宙中的每一個點都有一個相對位置,我們可以用矢量來描述這種關系。通過將這些點云轉換為相互連接的點的"網格",我們可以去掉多余的數據,減小文件空間——三個點之間的三角形越大,文件就越小。這里的關鍵是,去掉重復的數據以及我們有時所說的噪音(最終模型中不需要的元素)。當然,如果你手動構建網格,容易出現人為錯誤,但現在有強大的點云軟件應用程序,不需要有經驗的CAD技術人員,可以快速準確地完成這項工作,并將文件大小從千兆字節減少到兆字節。復原建筑的三步過程
故事并不是以網格模型結束的。網格本身是達到目的的手段——將點云映射成一個更小但點云同樣精細的文件,這些文件可以在不同的BIM系統中被多人同時使用。一個日常的建筑改造會從點云開始,捕捉“已建BIM”或“現狀”的位置,代表當前真實情況的快照,建筑師會在此基礎上疊加最終設計。然而,當涉及到保護和恢復我們的建筑遺產時,有一個重要的步驟,那就是通過定期的點云“備份”和安全存儲來捕獲“原狀”。LiDAR傳感器、其他手持式或佩戴式掃描儀使用戶能夠進行掃描,但到目前為止,更大和更復雜的掃描通常由第三方供應商處理,他們甚至可能部署無人機技術來詳細掃描高層建筑。網格軟件不僅可以為大數據量點云和最終設計軟件之間提供橋梁,并且提供存檔工具,以防最壞的情況發生丟失文件。HK Cube 1固態激光雷達

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
三維
+關注
關注
1文章
529瀏覽量
29934
發布評論請先 登錄
相關推薦
熱點推薦
【OFDR】實時感知、動態重構與歷史狀態回溯!昊衡科技-三維場重構軟件
三維場重構軟件三維場重構軟件通過TCP協議獲取傳感數據,并實時重構三維溫度/應變場。軟件支持導入三維模型(.wrl格式)與二維圖片(.jpe

昊衡科技 多芯光纖三維形狀傳感系統,精準感知!
對于空間形態感知要求極高的微創手術領域而言,如何精準、實時地監測柔性結構的三維形變,一直是技術落地過程中的關鍵痛點。昊衡科技基于自主研發的光頻域反射(OFDR)技術與多芯光纖傳感方案,推出動態分布式
三維時空與海康威視達成戰略合作
11月19日,三維時空軟件股份有限公司(以下簡稱“三維時空”)與杭州海康威視數字技術股份有限公司(以下簡稱“海康威視”)簽署戰略合作協議。三維時空董事長林斌、銷售總監林科,海康威視副總
激光雷達:智能時代的“感知之眼”,開啟三維世界新紀元
,激光雷達憑借其毫米級精度、全天候性能與三維建模能力,成為智能駕駛、機器人、智慧城市等萬億級賽道的核心基礎設施。 高精度感知:突破傳統傳感器的物理極限 傳統攝像頭在逆光、雨霧中“失明”,毫米波雷達難以識別靜

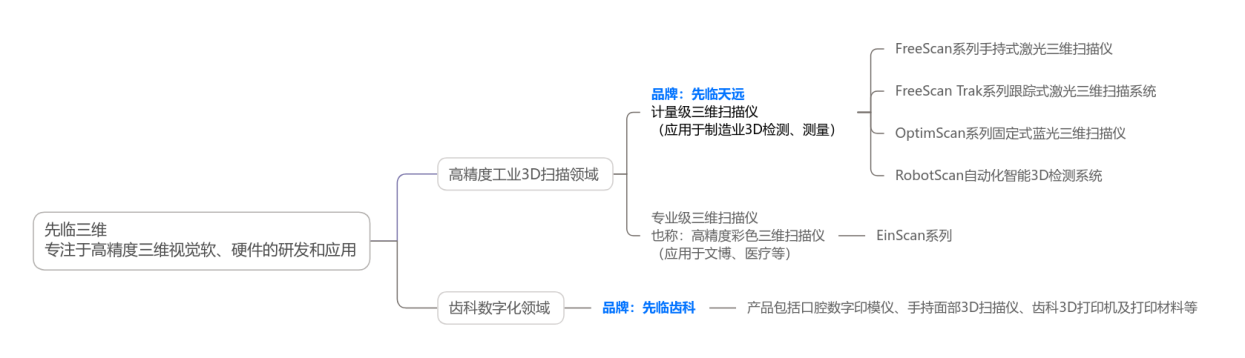
一文讀懂 | 三維視覺領域國家級制造業單項冠軍——先臨三維的品牌布局
,推動高精度三維視覺技術的普及應用。2024年,先臨三維營業收入超12億元,業務遍及全球100+個國家和地區。 先臨三維的高精度三維視覺技術深度應用于高精度工業3D掃描(
智慧城市數字孿生三維立體平臺,沃思智能
城市的虛擬鏡像,實現對物理城市的實時監測、模擬和優化,為城市治理、公共服務和產業發展提供了全新的解決方案。 數字孿生三維立體平臺的核心在于其能夠將城市的物理空間與數字空間緊密連接。通過高精度的三維建模技術,平

AI 驅動三維逆向:點云降噪算法工具與機器學習建模能力的前沿應用
在三維逆向工程領域,傳統方法在處理復雜數據和構建高精度模型時面臨諸多挑戰。隨著人工智能(AI)技術的發展,點云降噪算法工具與機器學習建模能力的應用,為

無人機航測三維建模遇難題?索尼FCB-EV9520L來破局!
在數字技術飛速發展的今天,無人機航測三維建模技術已成為城市規劃、災害評估、環境監測等領域的核心工具。而索尼FCB-EV9520L攝像機的出現,為這一技術注入了新的活力,以其卓越的圖像采集能力,成為
步科倍福手拉手,ModbusTCP主轉EtherCAT從,伺服壓接邁入新紀元
步科倍福手拉手,ModbusTCP主轉EtherCAT從,伺服壓接邁入新紀元
如何利用三維建模加速FCB-CR8530的定制化開發?案例與工具詳解
領域。然而,傳統開發流程中,硬件設計、結構驗證與軟件調試往往需要多次迭代,導致周期長、成本高。三維建模技術的引入,為FCB-CR8530的定制化開發提供了全新路徑,通過數字化仿真與快速驗證,顯著提升了開發效率。 一、三維
VirtualLab:光學系統的三維可視化
元件和探測器的位置,以及快速了解光在系統內的傳播。所應用的三維視圖建模技術可與經典的光線追跡相媲美。
如何生成一個系統視圖文檔
一個光學系統的三維視圖可以通過兩種不同的方式生成:
1.使用“光線結果
發表于 05-30 08:45
自動駕駛中常提的“點云”是個啥?
[首發于智駕最前沿微信公眾號]在自動駕駛系統中,點云技術作為三維空間感知的核心手段,為車輛提供了精確的距離和形狀信息,從而實現目標檢測、環境建模、定位與地圖構建等關鍵功能。那所謂的“

索尼FCB-ER8530:三維建模與視覺感知的跨界融合
在數字化浪潮中,三維建模技術正重塑工業設計、文化遺產保護與智慧城市管理等領域,而索尼FCB-ER8530一體化攝像機模組憑借其4K超高清成像與智能感知能力,成為這一進程中的關鍵硬件支撐。 三維
數字孿生 × 爆炸動畫 × 三維拆解
在三維場景中實現模型零件爆炸效果是一種常見且非常實用的視覺技術,廣泛應用于產品設計演示、機械運動模擬、建筑可視化等多個領域。



 工商網監
工商網監
評論