") myCobot 320 人工智能套裝2023版震撼上市!突破工作半徑和負載限制,全新夾爪抓取方式!
myCobot 320 人工智能套裝2023版震撼上市!突破工作半徑和負載限制,全新夾爪抓取方式!

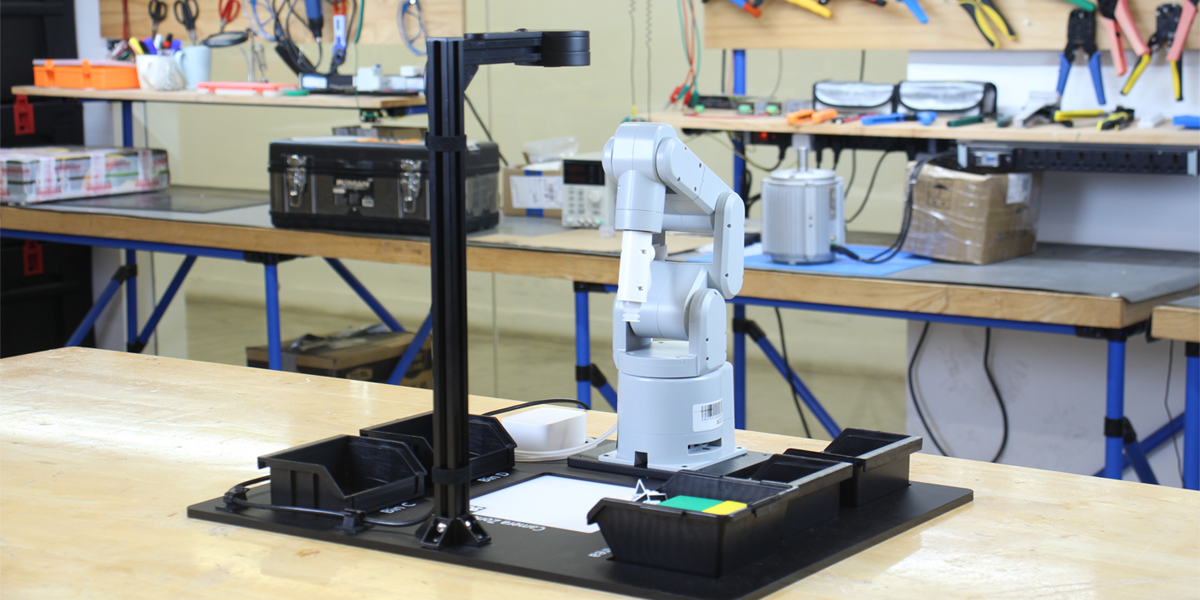
人工智能套裝是大象機器人旗下一款基于視覺識別+協(xié)作機械臂的套件,經(jīng)過數(shù)次的版本迭代更新優(yōu)化以及數(shù)千次國內(nèi)外方案部署。
人工智能套裝已然是一款十分優(yōu)秀成熟的入門級協(xié)作機械臂套件,在教育科研領(lǐng)域和個人創(chuàng)客開發(fā)中都有極大的應(yīng)用前景,在海內(nèi)外市場上銷售火爆,獲得了消費者和業(yè)界的廣泛認可。
大象機器人透露即將上市備受期待的人工智能套裝myCobot 320版本,新版本的人工智能套裝提供了對myCobot 320六軸協(xié)作機械臂的支持,突破了以往工作半徑和負載的限制,不僅在原有功能上做出了一些升級,還帶來了全新的夾爪抓取方式。下面讓我們一起來看看這款全新人工智能套裝的亮點!
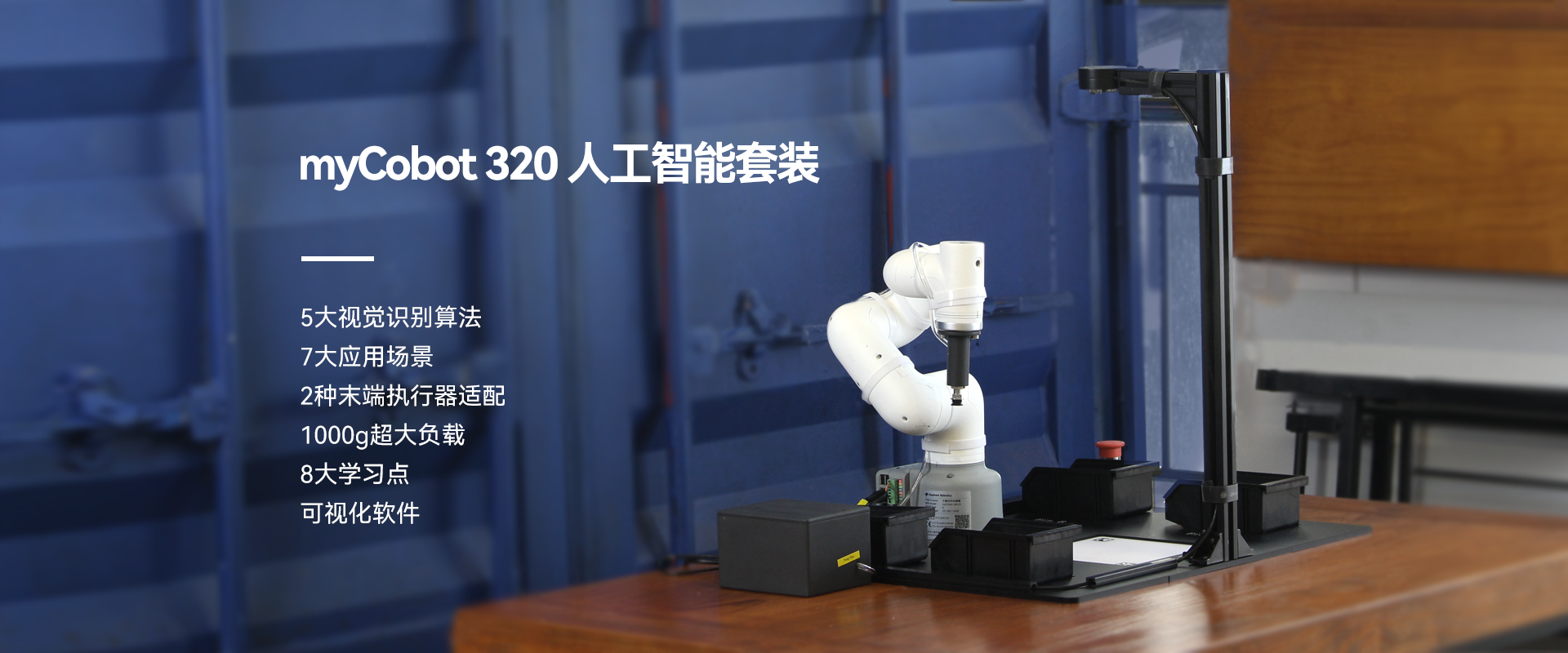
myCobot320 人工智能套裝2023版
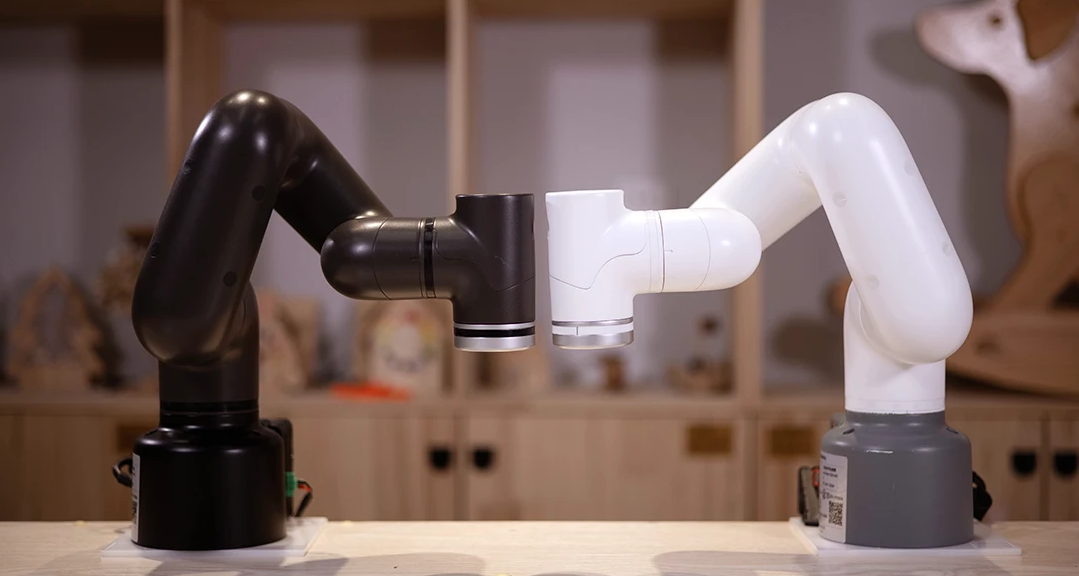
myCobot320六軸協(xié)作機械臂
人工智能套裝myCobot 320版本與以往最大的區(qū)別就在于新增了對myCobot 320六軸協(xié)作機械臂的支持。

myCobot系列機械臂也是大象機器人的一款拳頭產(chǎn)品,其中320型號是一款面向用戶自主編程開發(fā)的六軸協(xié)作機械臂。myCobot 320機械臂自身僅重3kg,負載卻達到了1kg,工作半徑也達到了350mm,體積小巧但功能強大。
開放的ROS仿真開發(fā)環(huán)境;內(nèi)置完善的運動學(xué)正逆解算法模塊;自由搭配的視覺開發(fā)應(yīng)用;
直觀的機械運動原理構(gòu)造解析;企業(yè)級通訊協(xié)議規(guī)范與應(yīng)用;12個標準的24V工業(yè)I/O接口;
支持業(yè)界主流控制語言接口;開發(fā)機械臂通訊協(xié)議;豐富的末端擴展配件;
myCobot 320機械臂在易用性、安全性、經(jīng)濟性方面的三大優(yōu)勢,使得myCobot 320機械臂成為兼顧商業(yè)應(yīng)用、教育科研亦或是創(chuàng)意開發(fā)的高性價比之選。
套裝新升級
320人工智能套裝2023版,5大視覺識別算法、7大應(yīng)用場景、2種抓取方式,超大載重1KG、M5和PI 2種適配機械臂、8大學(xué)習(xí)點并支持可視化軟件,是定位抓取、自動分揀、物品抓取模塊為一體的入門級人工智能套裝。基于python平臺,可通過開發(fā)軟件實現(xiàn)機械臂的控制,簡單易學(xué),能夠快速入門學(xué)習(xí)人工智能基礎(chǔ)知識,啟發(fā)創(chuàng)新思維,領(lǐng)悟開源創(chuàng)意文化。
其與原人工智能套裝相比,主要在以下方面有顯著的提升
更大的工作半徑和負載
得益于對myCobot 320六軸協(xié)作機械臂的支持,人工智能套裝myCobot 320版突破了以往人工智能套裝上工作半徑和負載的限制,工作半徑較之前的280mm來到了350mm,負載也從原來的200g提升到了1000g。更大的工作半徑和負載,也代表著更豐富的應(yīng)用場景。
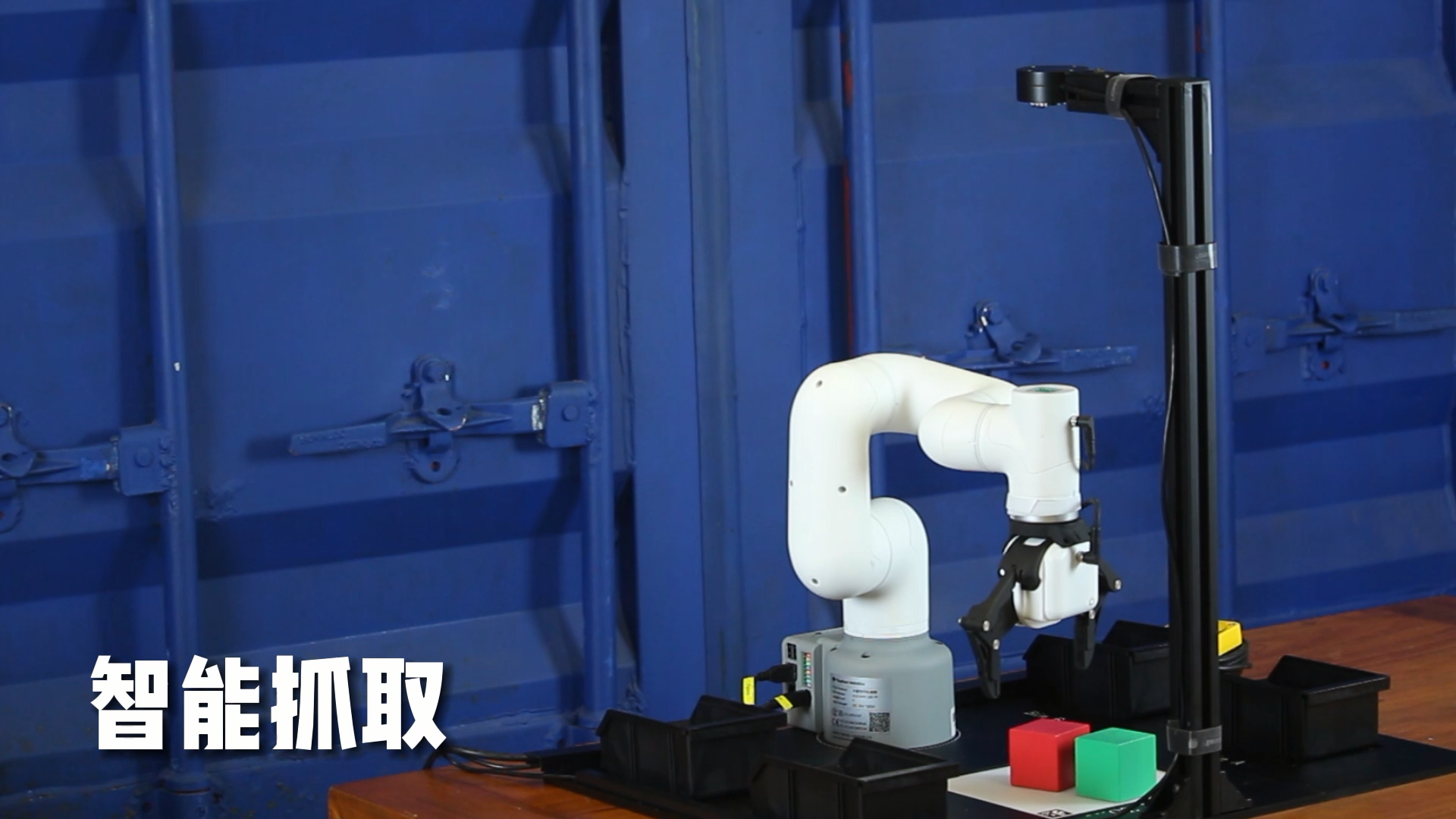
夾爪物品識別、智能抓取
區(qū)別于人工智能套裝只支持吸泵的抓取方式,人工智能套裝myCobot 320版本新增了對夾爪的支持。

高性能的夾爪搭配高負載的myCobot 320使得人工智能套裝myCobot 320版本可以進行物品識別和智能抓取,識別夾取多種不同體積不同重量的物品。

5大視覺識別算法
人工智能套裝基于機器人視覺以及手眼標定,共支持以下5大視覺識別算法
顏色識別
顏色識別是通過計算機視覺技術(shù)實現(xiàn)的,主要是通過對像素點的RGB值(紅、綠、藍三種顏色的組合值)進行分析和處理來進行顏色的識別。常見的顏色空間包括RGB、HSV、YUV等。其中,RGB顏色空間是最常用的一種顏色空間。基于顏色空間的方法主要是通過設(shè)置顏色空間的閾值來判斷像素點的顏色類別。
形狀識別
形狀識別是指在計算機視覺領(lǐng)域中,通過對圖像中物體的形狀和結(jié)構(gòu)進行分析和處理,實現(xiàn)對不同形狀物體的自動識別。通過圖像處理技術(shù)提取物體輪廓,并進行特征提取和描述,如邊界點數(shù)、曲率、周長、面積等,然后與預(yù)先定義好的模板或者已知形狀進行匹配,從而實現(xiàn)形狀識別。
二維碼識別
Aruco二維碼識別是一種基于OpenCV的計算機視覺技術(shù),用于對二維碼進行快速和準確的識別和定位。使用Aruco庫中的函數(shù),對輸入的圖像進行處理和分析,提取圖像中的Aruco二維碼,并識別出每個二維碼的編碼和位置信息。在檢測和識別的過程中,Aruco庫會對輸入圖像進行二值化、角點檢測、碼字提取等操作,以提高識別準確率和速度。
特征點識別
特征點識別是計算機視覺中的一種關(guān)鍵技術(shù),用于在圖像中尋找具有獨特性質(zhì)和可重復(fù)性的點,并將其用作圖像匹配、物體跟蹤、三維重建等任務(wù)的基礎(chǔ)。對于選定的特征點,在圖像中進行提取和描述。常用的特征描述算法包括SIFT、SURF、ORB、BRIEF等。這些算法能夠從圖像中提取出具有獨特性質(zhì)的特征點,并將其表示為具有穩(wěn)定性和可比性的特征描述符。
YOLOV5識別
YOLOV5是一種基于深度學(xué)習(xí)的目標檢測算法,它采用了一種稱為"one-stage"的檢測方式,可以同時預(yù)測圖像中多個目標的位置和類別。YOLOV5使用了類似于ResNet的骨干網(wǎng)絡(luò)來提取圖像的特征,以便于識別目標。不同于傳統(tǒng)的Faster R-CNN等two-stage的檢測方式,YOLOV5將特征提取和目標檢測合并在一起,大大提高了檢測速度。

可視化軟件
除了上述硬件功能,大象機器人的人工智能在軟件控制方面也下了許多功夫,支持可視化軟件操作,可以選擇對應(yīng)視覺算法,全自動識別抓取放置,方便觀看效果展示,并且支持分步運行,可以只識別、只抓取、只放置,讓用戶理解每一過程原理。
憑借高開放性、可視化的UI界面,使得人工智能套裝不管是用于科研教育的開發(fā)驗證,還是初學(xué)者的分解學(xué)習(xí)或者是創(chuàng)客們的創(chuàng)意應(yīng)用都更加得心應(yīng)手。
參數(shù)及新舊對比
| 參數(shù) | |
| 名稱 | 320人工智能套裝2023版 |
| 整體尺寸 | 521mm*637.5mm*600mm |
| 識別速度 |
顏色/形狀/二維碼:300ms 特征點/yolov5:600ms |
| 識別精度 | 3mm |
| 攝像頭名稱 | USB無畸變攝像頭 |
| 圖像像素 | 2M1080p |
| 支持圖像格式 | MJPG/YUY2 |
| 像元尺寸 | 3.0umx3.0um |
| 最高幀率 |
MJPG:1920 1080@30fps YUV:1920 1080@30fps |
| 末端配件 | 自適應(yīng)夾爪Pro,myCobotPro獨頭吸泵 |
| 載重 | 1kg |
| USB協(xié)議 | USB2.0HS/FS |
| 支持的分辨率 | 1280X720,640X480,320X240 |
| 電源供應(yīng) | DC5V90mA |
| 視場角度 | 110°無畸變 |
| 支持的系統(tǒng) | Windows7/8/10LINUX(includeuvc)/樹莓派 |
| 對比 | ||
| 參數(shù) | 人工智能套裝 | 320人工智能套裝 |
| 機械臂臂展 | 280mm | 350mm |
| 機械臂負載 | 200g | 1000g |
| 物品識別 | 不支持 | 支持 |
| 智能夾取 | 不支持 | 支持 |
| 夾爪 | 不支持 | 支持 |
| 吸泵 | 支持<=200g | 支持=1000g |
“享受機器人世界”
myCobot320人工智能套裝2023版在科研教育、創(chuàng)客開發(fā)等領(lǐng)域具有廣泛的應(yīng)用前景。其出色的性能和靈活性使其適用于教育實驗室、研究機構(gòu)以及各類創(chuàng)客項目,推動科技創(chuàng)新和人工智能技術(shù)的普及。
大象機器人作為深圳市專精特新以及國家高新技術(shù)企業(yè),依托于資源和區(qū)位的優(yōu)勢,致力于為科研教育、創(chuàng)客開發(fā)等領(lǐng)域提供創(chuàng)新的機器人解決方案。
憑借技術(shù)的卓越和用戶的信任,大象機器人已成為全球領(lǐng)先的機器人技術(shù)公司之一。

“享受機器人世界”是大象機器人的一貫愿景,為此,大象機器人正在不斷發(fā)掘著協(xié)作機器人的魅力與未來,myCobot 320人工智能套裝2023版的面世代表著大象機器人將繼續(xù)全身心地投入到機器人領(lǐng)域的創(chuàng)新和發(fā)展之中,致力于為消費者們提供性能優(yōu)異、性價比高、使用便捷的機器人解決方案!
審核編輯黃宇
-
機器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222270 -
人工智能
+關(guān)注
關(guān)注
1817文章
50098瀏覽量
265402 -
大象機器人
+關(guān)注
關(guān)注
0文章
86瀏覽量
376
發(fā)布評論請先 登錄

Robotiq推出適用于 2F 自適應(yīng)夾爪的觸覺傳感指尖, 為具身智能 (Physical AI) 注入“觸覺”能力

革新科研智造,引領(lǐng)材料未來——高通量智能科研制備工作站
利用超微型 Neuton ML 模型解鎖 SoC 邊緣人工智能
挖到寶了!人工智能綜合實驗箱,高校新工科的寶藏神器
挖到寶了!比鄰星人工智能綜合實驗箱,高校新工科的寶藏神器!
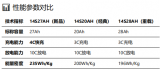
正方科技14S27AH智能電池組震撼上市
超小型Neuton機器學(xué)習(xí)模型, 在任何系統(tǒng)級芯片(SoC)上解鎖邊緣人工智能應(yīng)用.
迅為RK3588開發(fā)板Linux安卓麒麟瑞芯微國產(chǎn)工業(yè)AI人工智能
最新人工智能硬件培訓(xùn)AI 基礎(chǔ)入門學(xué)習(xí)課程參考2025版(大模型篇)
人工智能是做什么的

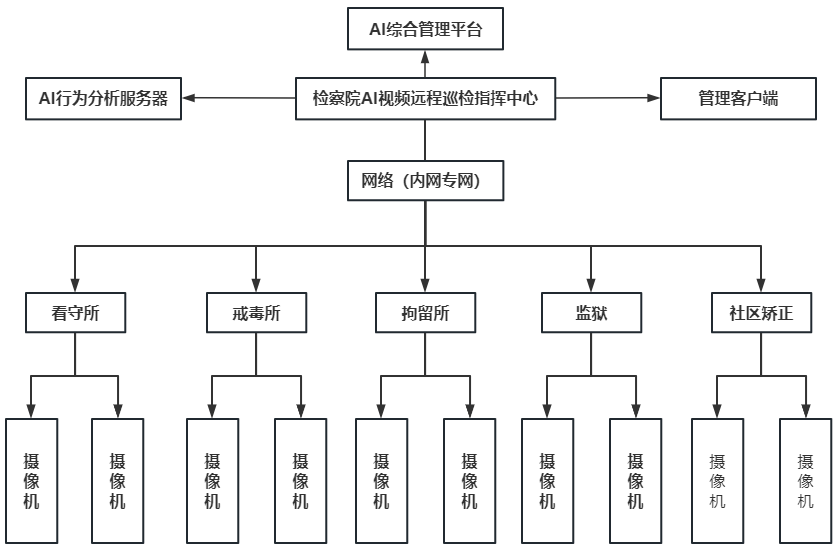
“人工智能+”賦能檢察院巡檢智慧監(jiān)督



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論