 解決不完的Corner Case
解決不完的Corner Case

在成本壓力面前,什么可以被放棄,什么不可以?
我從沒有想過輔助駕駛這個詞會與降本增效聯系在一起。
高階輔助駕駛, 天然與高成本綁定,大算力芯片加上高性能傳感器帶來的硬件成本, 算法人才的價格帶來的極高研發成本。
這都意味著大量投入。
但是在更高級別無人駕駛遲遲未能落地的今天,車企內卷堆料沒有帶來真正用戶體驗明顯提升,也就無法成為影響用戶選擇的主要因素。
這都讓車企對輔助駕駛的投入變得更加謹慎,面對內卷的態勢, 砍成本, 但是不砍功能成了現在車企面對輔助駕駛時的態度。
那什么是可以被放棄的,什么不可以?
01
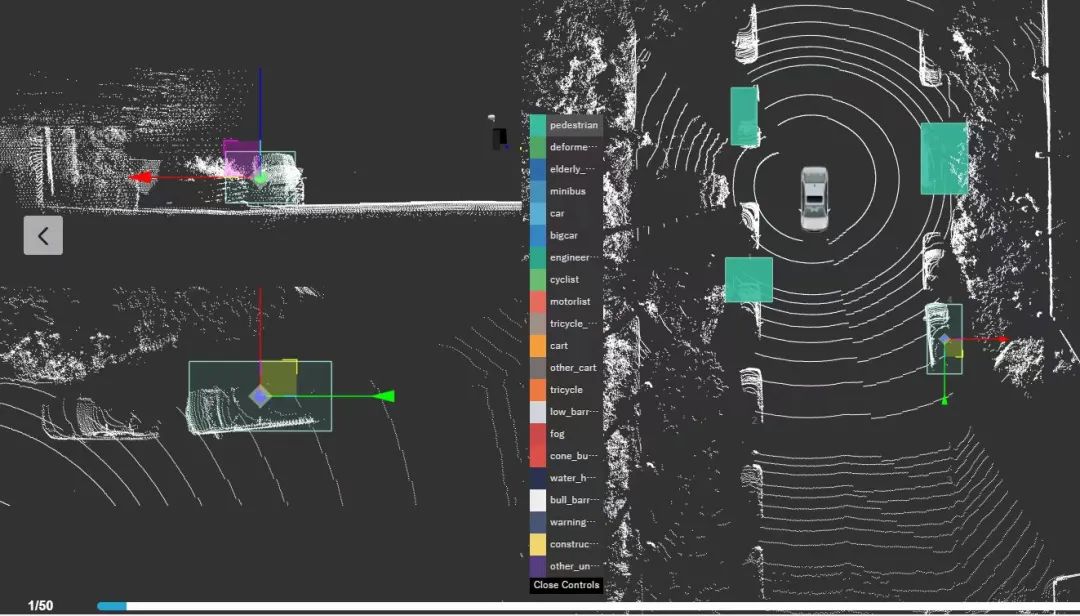
激光雷達
如果目標不是 L4,你還有意義嗎?
一年前知乎上還有純視覺和多傳感器融合的爭論,現在這個時間節點大家似乎都已經習慣了,純視覺和感知融合的并行結果。
毋庸置疑,多傳感器融合的上限確實比純視覺的上限要高,自動駕駛要求的全場景面對惡劣天氣的足夠魯棒性, 例如光照不足時穩定的環境感知,攝像頭的被動感知特性決定了對天氣的敏感程度。
而激光雷達作為主動傳感器,能夠在光照不足時,保證高質量的感知結果,也能提供通用障礙物的檢測結果。
但是這就是全部了。
激光雷達點云對物體類別天然劣勢,決定了激光雷達無法完全取代攝像頭。
而激光雷達帶來的效用卻沒有讓更高級別的輔助駕駛更快到來,不確定性依然存在,鬼影,噪點等等都在嘲笑過度樂觀的工程師們。
而量產固態雷達們在成本妥協之后,帶來的硬件缺陷也再一次困擾著算法工程師們。
所以兩年前大干快上激光雷達的量產車,實際上也只是在傳統的 L2 功能下高權重使用了激光雷達的點云結果。
比如 AEB。
「可有意思的是,AEB 的結果很多家還無法與純視覺的 Mobileye 抗衡」。這是某大廠智駕測試工程師所說。???????

加上激光雷達后,多一個城區輔助駕駛場景,再多一個責任歸屬都是駕駛人的說辭。 這似乎無法成為購買決策最重要的原因。
回過頭看,關于蔚小理三家,小鵬入局最早,發布功能也最多,激光雷達的能力也確實被有效利用了,城市輔助駕駛的能力也獨樹一幟,可是這暫時都沒有帶來實際的業績提升。
蔚來激光雷達量產發布最早,可惜智駕積累不如小鵬,暫時沒有證明激光雷達版本車型比自家上一代方案功能有質的飛躍。
如果主打智駕功能領先的 G6 能打一個漂亮的翻身仗的話,激光雷達的重要性會被重新確認,相反則是激光雷達市場的另一個景象。
但是無激光雷達的智駕方案也并未落入下乘,特斯拉FSD的表現和低成本足以讓車企們停下腳步冷靜思考其必要性。
當成本壓力倒逼車企推出無激光雷達版本車型,激光雷達最后成為了高配車型一個補盲或者距離確認的器件的話,意義在何處?
如果有一天,激光雷達成為智駕非標配硬件的話,整體出貨預期暴跌,禾賽們接下來的業績如何兌現?
02
高精地圖
你很好,但是也決定了算法的上限。
也許圖商沒有想過,自己成為雞肋的一天會來的如此快。
高精度地圖的繪制方式決定了上限,頻繁更新的道路界面是帶來了天然的不確定性, 并且地圖繪制時也無法保證完全沒有錯漏。
實際上,在以往高速導航輔助駕駛中出的很多問題都可以歸因到高精度地圖上,定位不準,或者畫線不準確常常會造成誤打方向,而這些都會被一句:「高速導航輔助駕駛不是自動駕駛,請時刻保持注意力駕駛」一筆帶過。
在高精地圖沒有更新前,這里的 bug 只能靠又一個 if else 解除。
而沒有高精地圖的地區只能降級,也限制了很多地區的使用,最后都會表現在產品的銷量上,只靠北上廣深的用戶,銷量再好也難以存活。
還有一點,高精度地圖初始化定位的時間與 GPS 信號強相關,這在信號不好的位置,又成為了另一個無法被解決的瓶頸。
這讓行泊一體方案更加難以推進。
于是眾多公司開始放出輕地圖方案,眾包建圖,實時建圖不一而足,努力降低對高精度地圖的依賴,進而節省成本。
一個一級城市千萬級的費用,沒有車企不想節省。
03
數據標注
實在是太貴了。
今年眾多公司都在說 BEV + Transformer 方案上車,理想小鵬蔚來,一個都沒有落下,可以提供 360 感知能力的的 BEV 網絡讓城市導航輔助駕駛成為可能。
但是不可忽略的一點是,之前的積累的數據失效了。
之前的 2D 框的標注用于做檢測,然后再確認 3D 位置的方式與 BEV 差異極大。
「是的,一切重新開始。」某車企感知數據負責人無奈表示。
對于多個攝像頭共同確認距離和位置的方案來看,也就是說,某個圖像上的標注框不再是重點,而是對應 3D 世界的位置。很多方案里不僅加入空間信息,也加入時序信息,也就是要求穩定的 3D 位置跟蹤。
這種標注難度不可同日而語。
數據重新積累加上數據標注難度提升,成本壓力更大。這讓一些體量較小的智能駕駛公司被 BEV 拒之門外,也幾乎提前拿到了被高階輔助駕駛淘汰的通知書。
特斯拉用多達千人的標注團隊和自動標注產線為后來者提供了參考,于是國內我們逐漸看到一些類似的宣傳,這些都可歸因給數據標注成本。
而這已經不是算法的范疇了,而是車企數字基建的范疇。
04
解決不完的 Corner Case
看不到的曙光。
我們期待今年各大車企下半年城市輔助駕駛的大量推送,但是同時也非常恐慌。
城市輔助駕駛比高速輔助駕駛難太多,城市里的交通狀況復雜程度難以預料,等待車企的是事故處理還是榮耀加身可能也只是一念之間。
眾多奇形怪狀的車輛和突然沖出來的交通參與者,這些都會放大各家的 Corner case 待解決池。
測試和修復工程師的工作量會被不斷加大,這些工作量都是成本。
從車端回流的眾多異常數據放在云端,數據如何保存和處理,是金礦還是垃圾堆?需要數據挖掘團隊來回答。可惜,這個問題沒有標準答案。
如何提高 Corner Case 的解決效率,如何從一個點發掘到一個具象泛化的場景。
曾經與一個感知算法工程師聊過一個非常有意思的場景:一個紅色的氣球剛好飄到了十字路口中間,算法將其識別成了紅燈,造成了車輛異常通行。
這個問題如何解決,采類似的數據(且不論采集難度)訓練一遍,解決了紅色的氣球場景,但是綠色的氣球可能并不意味著被解決。
這不是合理的迭代方式,特斯拉也做過了示范,用合成數據可以解決這個問題, 例如 Tesla AI Day 上用一家三口在高速上奔跑的合成數據解決了某些場景問題。
這是值得學習的降本策略。
(這里應該講 特斯拉的合成數據,怎么做的,解決了什么?然后在推導出觀點)
寫在最后
參考答案,摸著特斯拉過河
現在回過頭看, 關于純視覺和激光雷達的多傳感器融合的爭論雖然還沒有定論。
特斯拉為首的視覺派卻在降本上先得一籌, 畢竟高精度傳感器的配置似乎并沒有讓高階輔助駕駛來的更快, 也沒有獲得實質性勝利。
而特斯拉靠著自己長久沒有大改的傳感器方案在一直進行著優化,如此長的時間有這樣的方案定力,這很不容易。
還有很重要的一點,他們的數據是一直有高價值的。 自動化數據產線到現在也一直在努力進行迭代,合成數據也在逐漸為他們提供更多數據泛化的能力。
高階輔助駕駛價值被重估的現在, 也許我們十年也看不到 L4 級別的自動駕駛的到來。
車企逐漸內卷,用犧牲利潤的方式換取市場大環境下,自動駕駛開發如何從大鳴大放到細水長流,是一個非常值得思考的話題。
畢竟在汽車行業, 壓縮成本的能力可能比什么都重要。
-
傳感器
+關注
關注
2576文章
55041瀏覽量
791336 -
激光雷達
+關注
關注
979文章
4470瀏覽量
196529 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179862
原文標題:解決不完的 Corner Case
文章出處:【微信號:nev360,微信公眾號:焉知新能源汽車】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
冬季灌封膠不干?環氧聚氨酯低溫固化五大避坑指南 |鉻銳特實業

當模型遇見現實:從“不完美”到“夠用”的智慧:日常中的模型啟示

Switch的應用場景
e203乘除法模塊(e203_exu_alu_muldiv.v)中的back2back和special case信號的含義
Simulink模型測試典型問題分享-接口定義不完整

【嘉楠堪智K230開發板試用體驗】高校競賽-2025電賽-C題
怎么把矩形識別與調節閾值的代碼合到一起?
廣成科技Profinet轉換器的應用場景
正點原子阿波羅H743使用DMA2D后普通刷出現問題怎么解決?
labview tcp讀取數據不完整
求助,關于正點原子阿波羅H743使用DMA2D后普通刷出現問題求解
canmv-k230使用攝像頭出現紫色畫面,并且顯示不完全怎么修復?
AD7768與STM32F407進行數據通信,SPI1讀取到的數據不完整,整體數據在字節上出現偏移,怎么解決?
IBIS模型中的Corner參數處理




 工商網監
工商網監
評論