 Kalman濾波通俗理解+實際應用
Kalman濾波通俗理解+實際應用

01 Kalman用于解決什么的問題
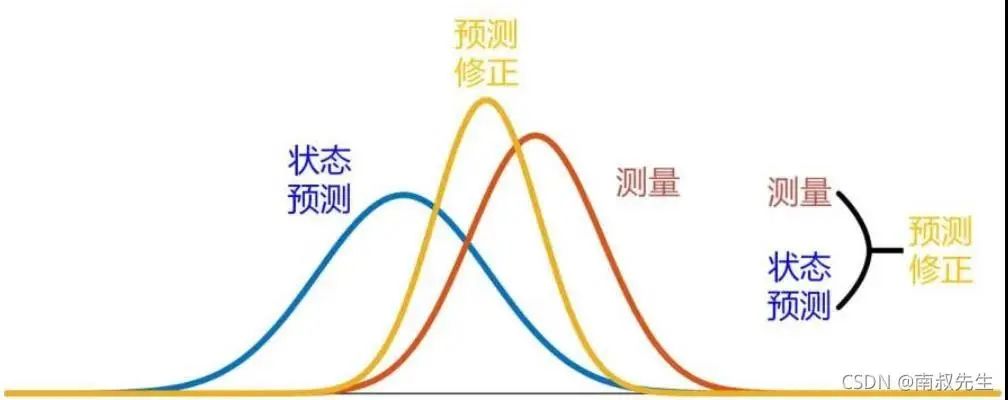
卡爾曼濾波是一種利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計的算法。由于觀測數據中包括系統中的噪聲和干擾的影響,所以最優估計也可看作是濾波過程。
人話就是:線性數學模型算出預測值+傳感測量值=更準確的測量值。
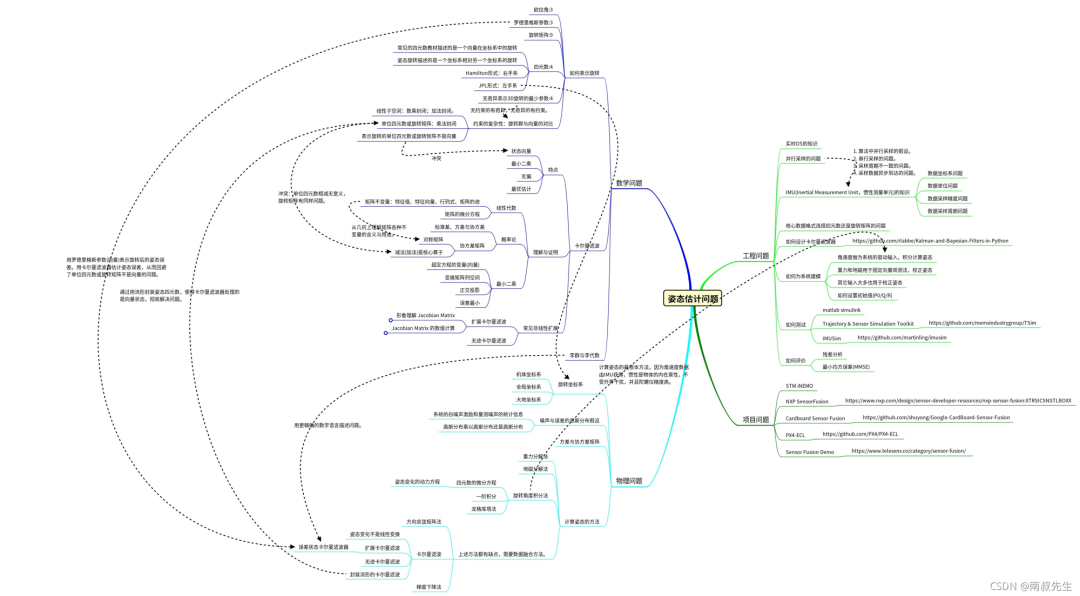
02 先來看一下姿態估計問題
03 看幾個例子
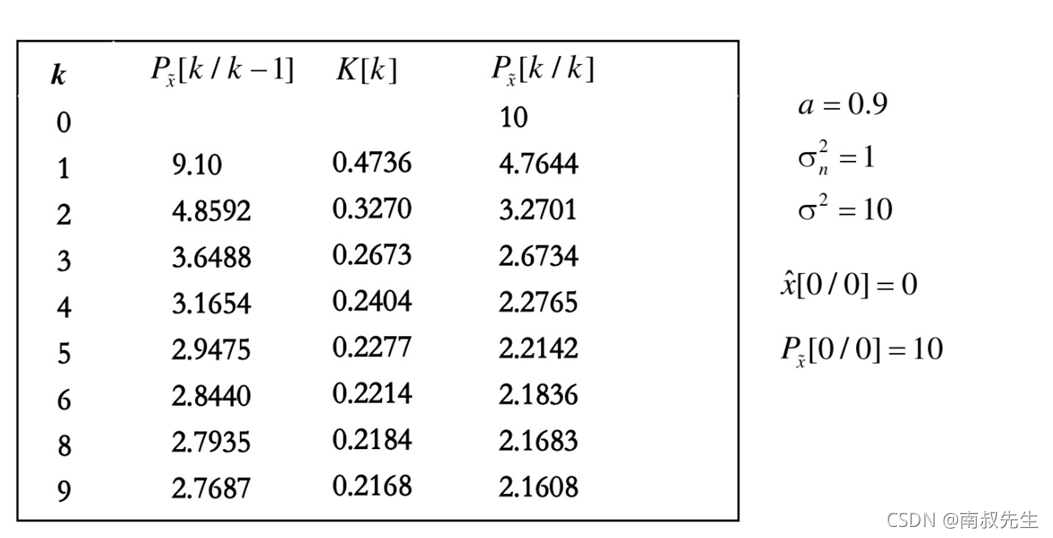
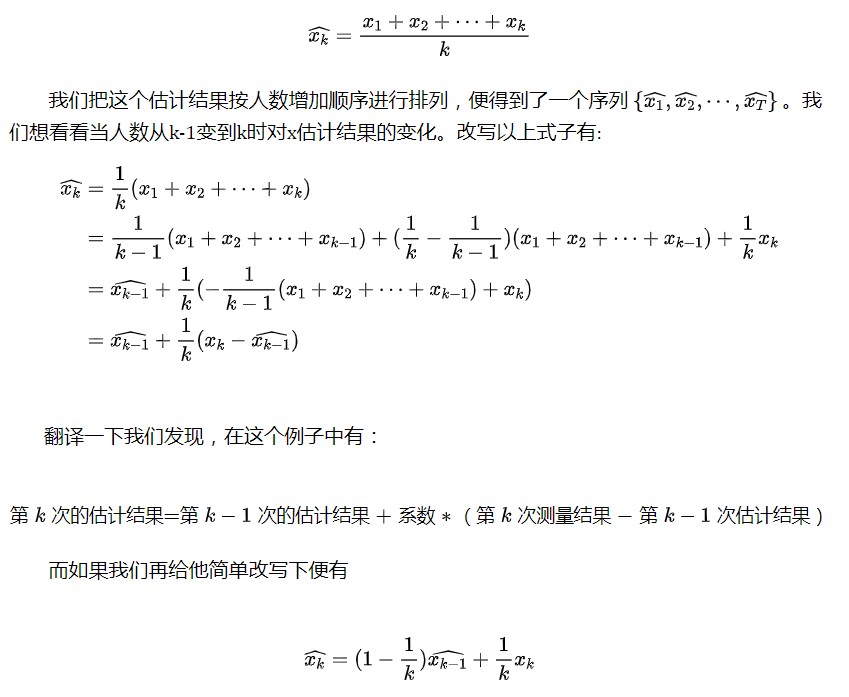
(1)例題1

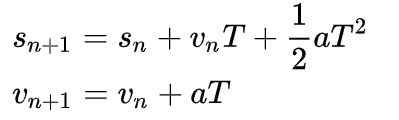
(2)例題2——運動模型,寫出勻加速運動的狀態轉移方程
第一步,根據基本的物理運動方程,寫出狀態方程
第二步,寫出觀測方程模型
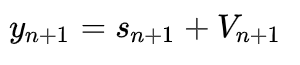
我開始也不明白這個觀測方程是啥意思,實際上這是模擬傳感器的測量值,S代表位移,V代表誤差。這里代表目標測量量為位移。
第三步,將第一步和第二步的狀態方程與觀測方程寫成矩陣形式
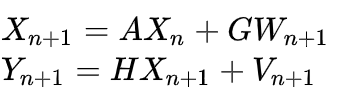
根據對應關系,可以得到系數:

其中A叫做狀態轉移矩陣,G叫做控制矩陣,H叫做預測矩陣
給定一個初值,就可以迭代得到后面的值了。
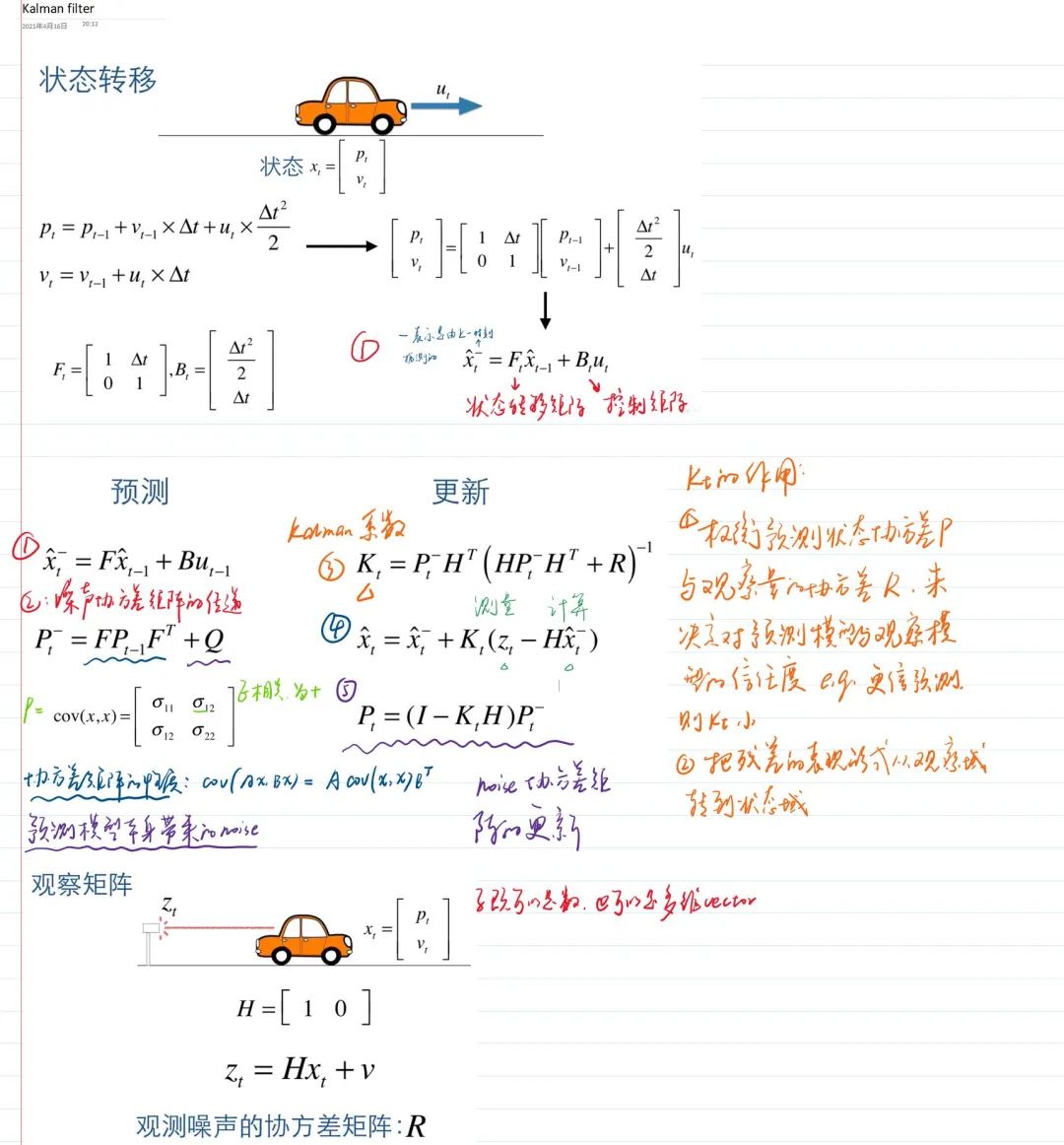
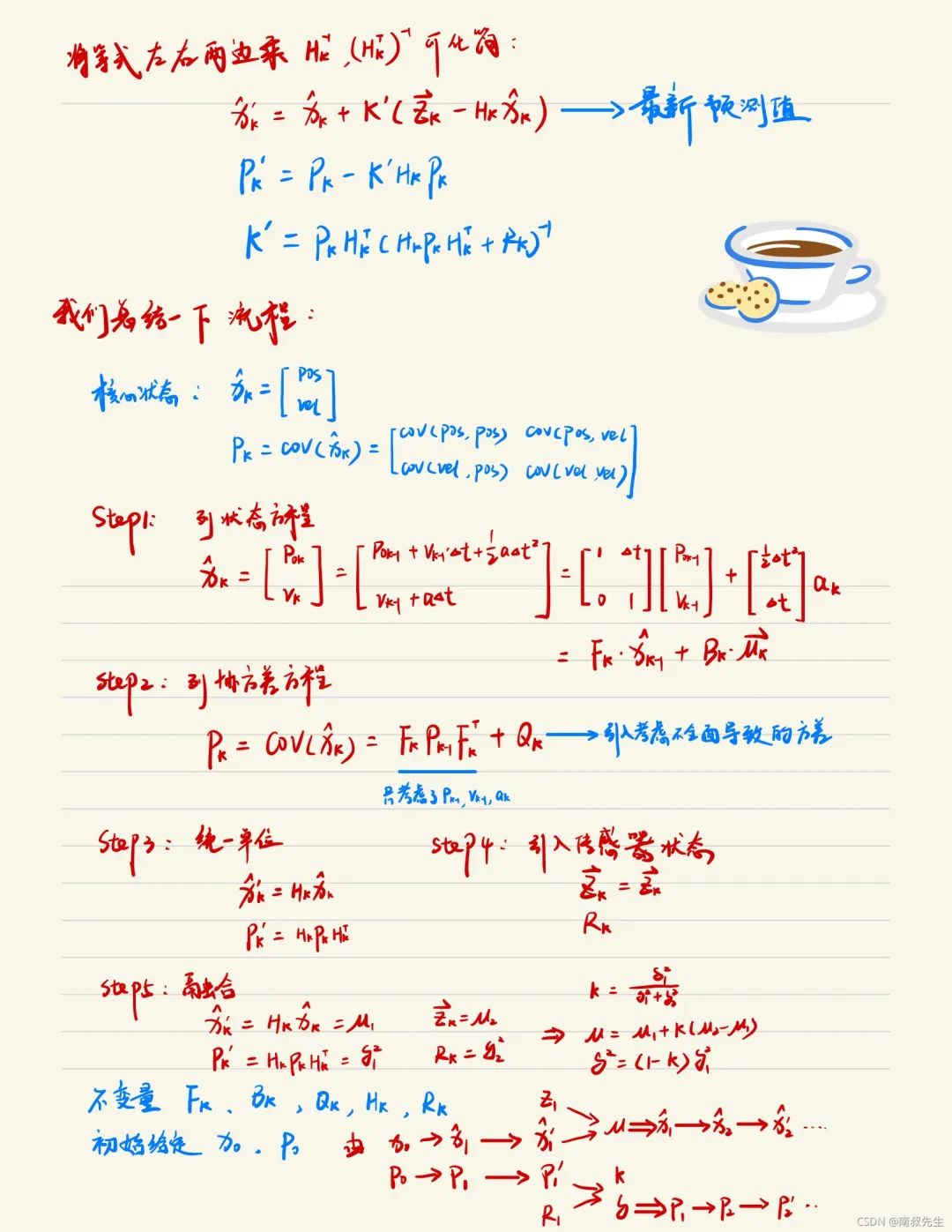
04 計算流程
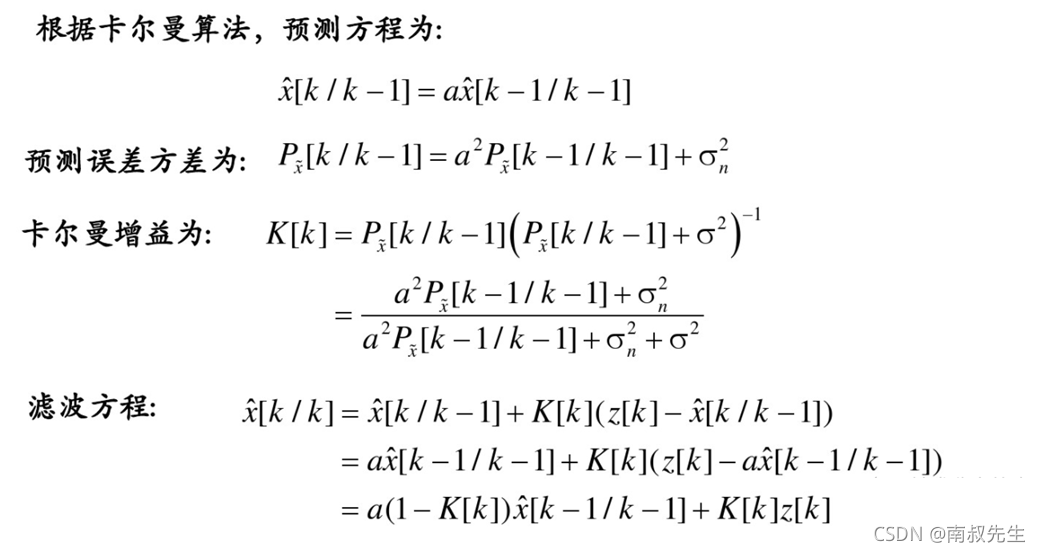
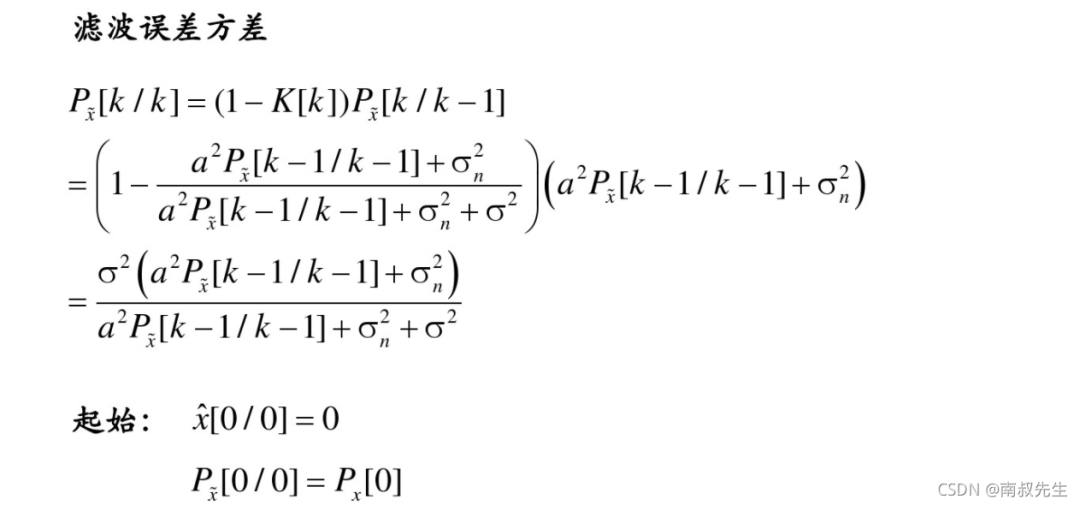
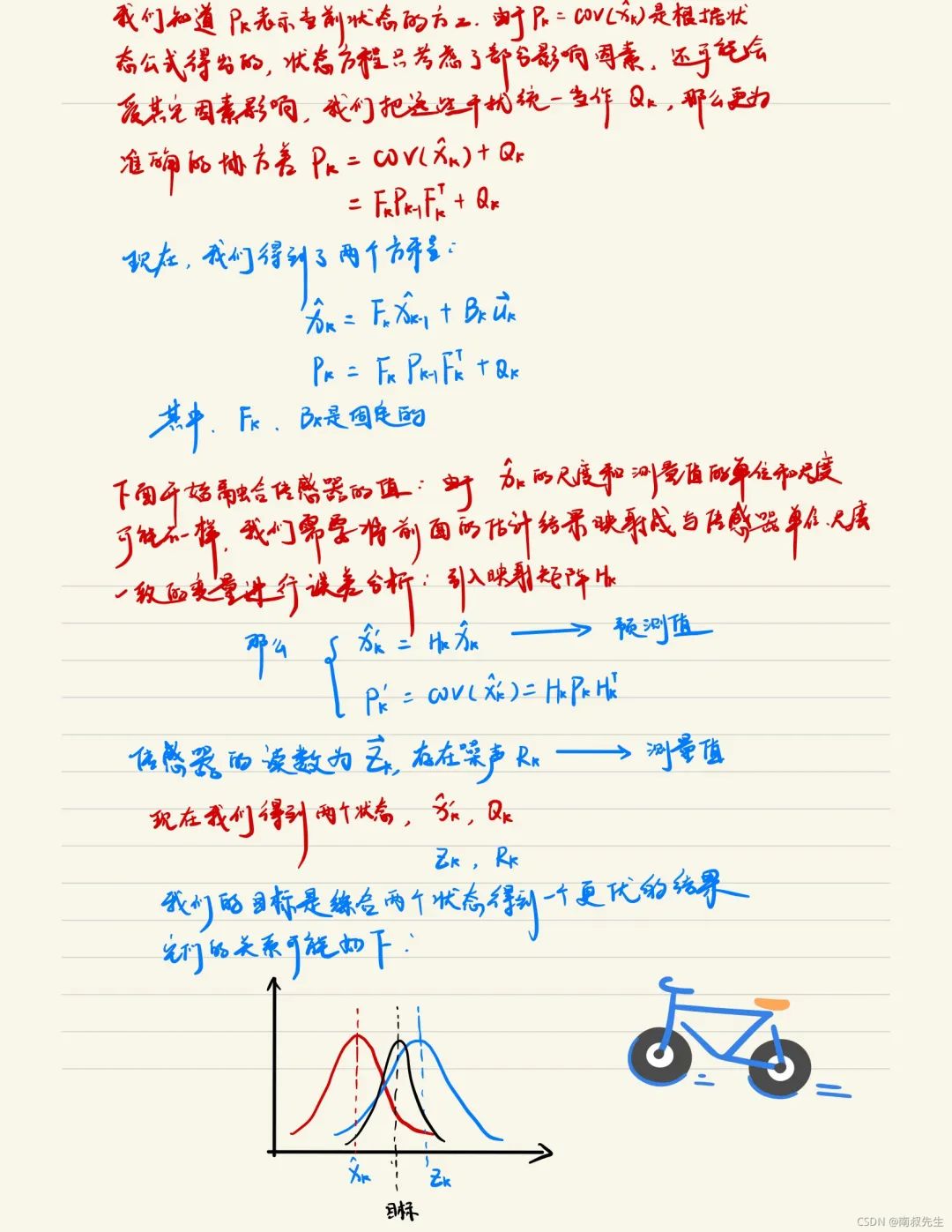
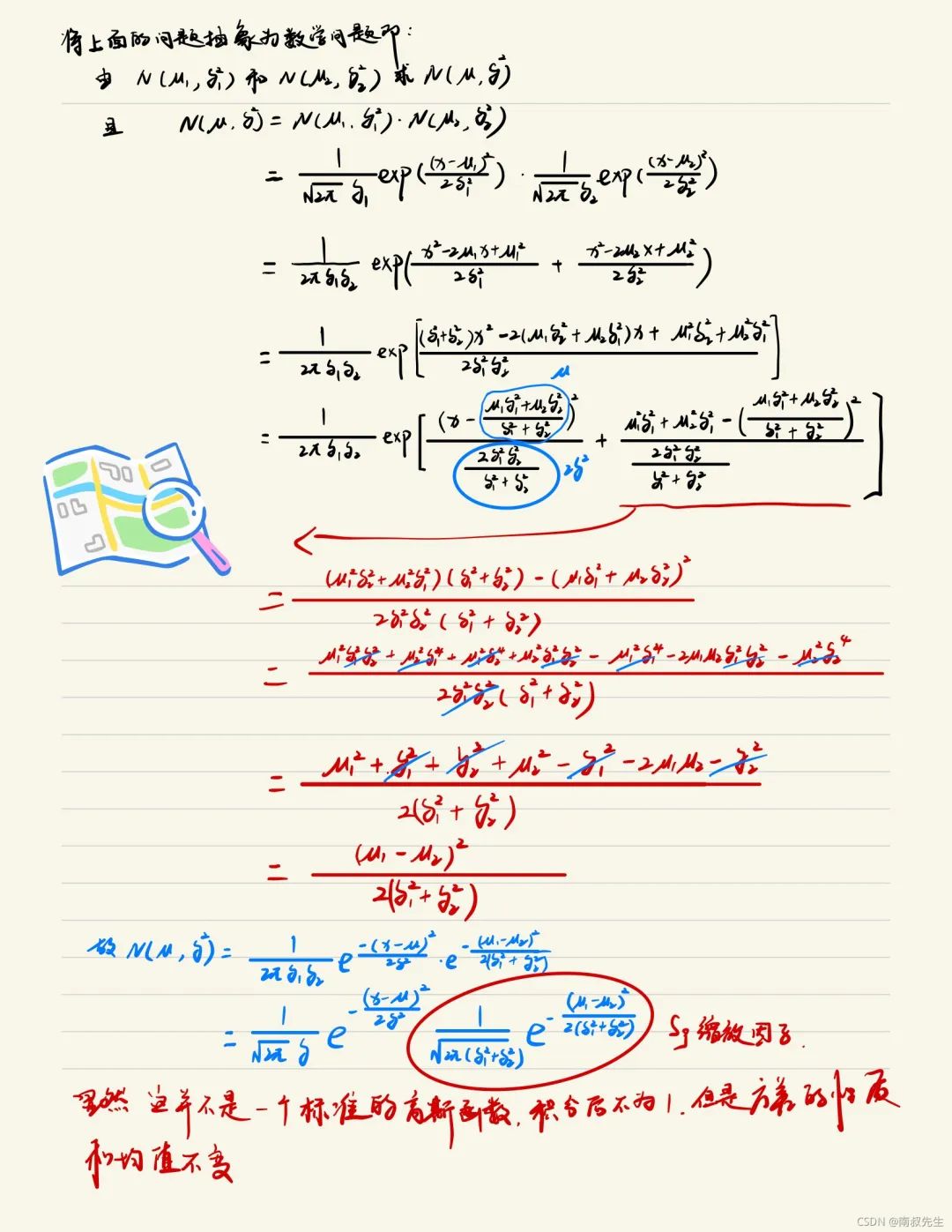
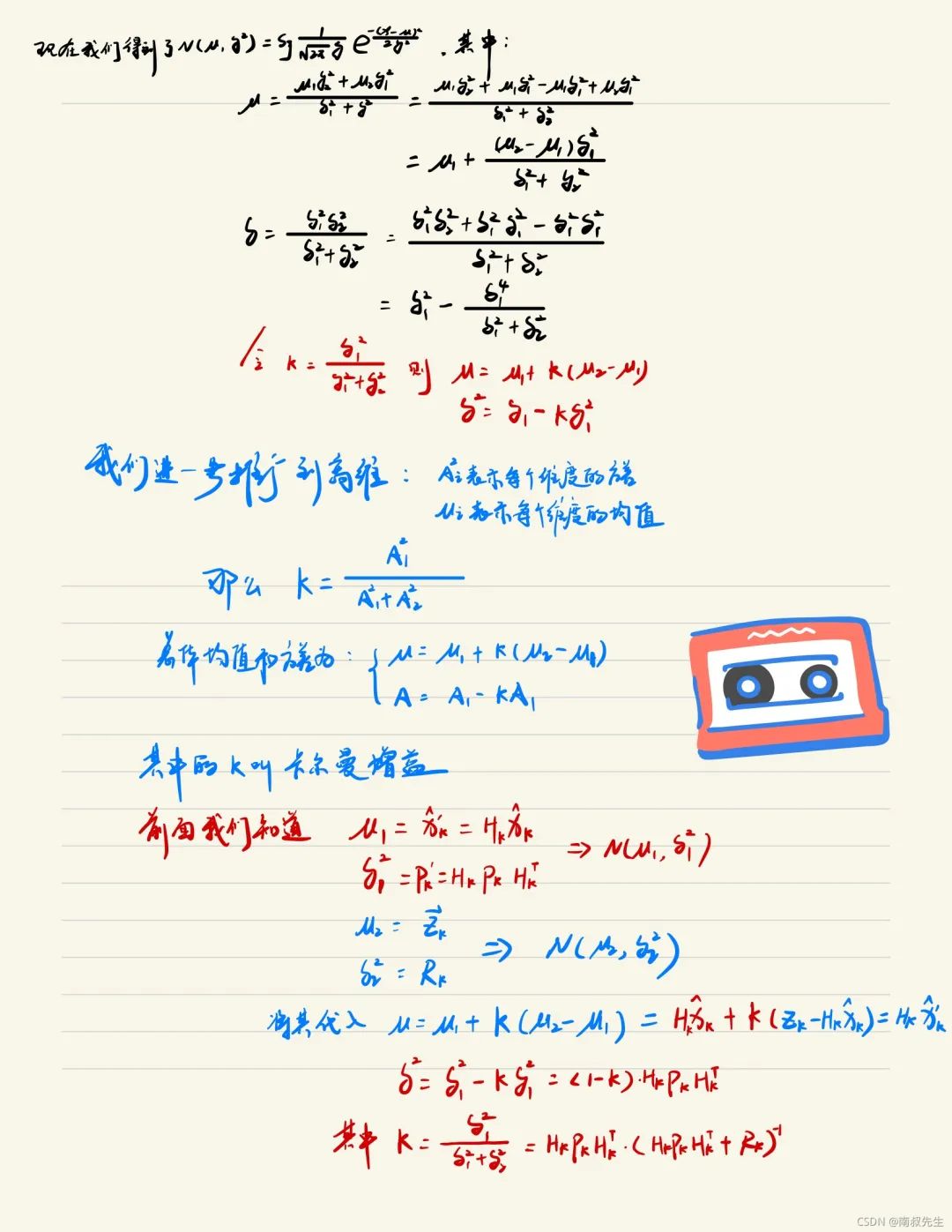
05 詳細推導

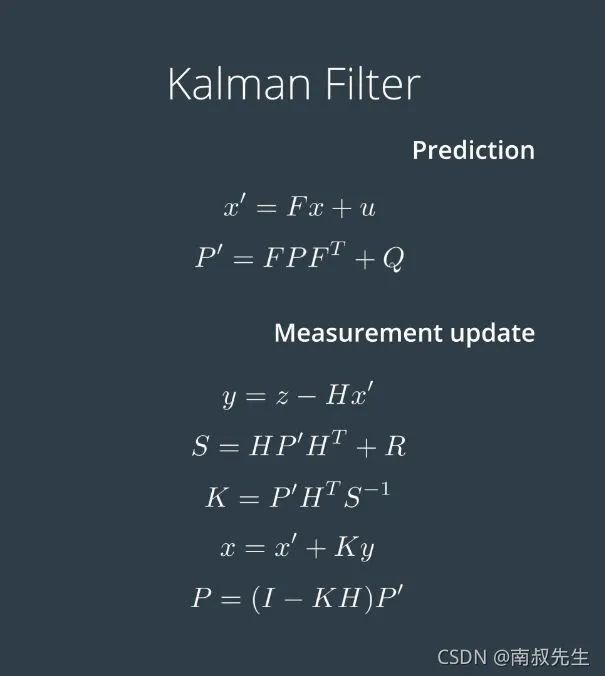
下圖更簡潔的展示了計算流程:
其中F為控制矩陣,Q為預測不確定性,R為傳感器噪聲,H為映射矩陣,y為誤差,
S為方差之和,K為卡爾曼增益,P為更新后的協方差
審核編輯:劉清
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
狀態機
+關注
關注
2文章
499瀏覽量
29152 -
卡爾曼濾波算法
+關注
關注
0文章
12瀏覽量
2261
原文標題:Kalman濾波通俗理解+實際應用
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
基于Kalman濾波的多尺度融合估計新算法
將信號的多尺度分析方法與多傳感器數據融合技術相結合,基于某一尺度上給定的狀態模型和在不同尺度上擁有不同采樣率的多傳感器分布式動態系統,提出了一種新的基于Kalman 濾波
發表于 06-22 13:15
?21次下載
Kalman濾波在視頻監控中的應用
Kalman濾波在視頻監控中的應用摘要:卡爾曼濾波(Kalman) 是一種根據時變隨機信號的統計特性,對信號的未來值做出盡可能接近真值的一種估計方法. 首先對卡爾曼濾
發表于 05-05 16:26
?30次下載
FPGA的Kalman濾波器的設計
FPGA的Kalman濾波器的設計
摘要:針對電路設計中經常碰到數據的噪聲干擾現象,提出了一種Kalman濾波的FPGA實現方法。該方法采用了TI公司的高精度模數轉換
發表于 04-13 13:32
?3604次閱讀
Kalman濾波算法在加速度計自標定中的應用
針對自標定加速度計組合動基座試驗數據中存在的數據異常問題,推導并運用自適應Kalman濾波算法剔除異常數據,通過對不同Kalman濾波算法自標定精度解算結果的均值和標準差進行比較
發表于 04-12 17:08
?0次下載
基于Kalman濾波的俯仰角速度估計
直升機的姿態角速度不容易準確獲得,本文提出了一種采用Kalman濾波理論對直升機俯仰角速度進行估計的方法,建立俯仰角速度方程,給出估計參數的Kalman濾波算法,實驗證明該方法能
發表于 06-21 16:37
?31次下載



 工商網監
工商網監
評論