") KUKAC4機(jī)器人首次開機(jī)啟動(dòng)
KUKAC4機(jī)器人首次開機(jī)啟動(dòng)

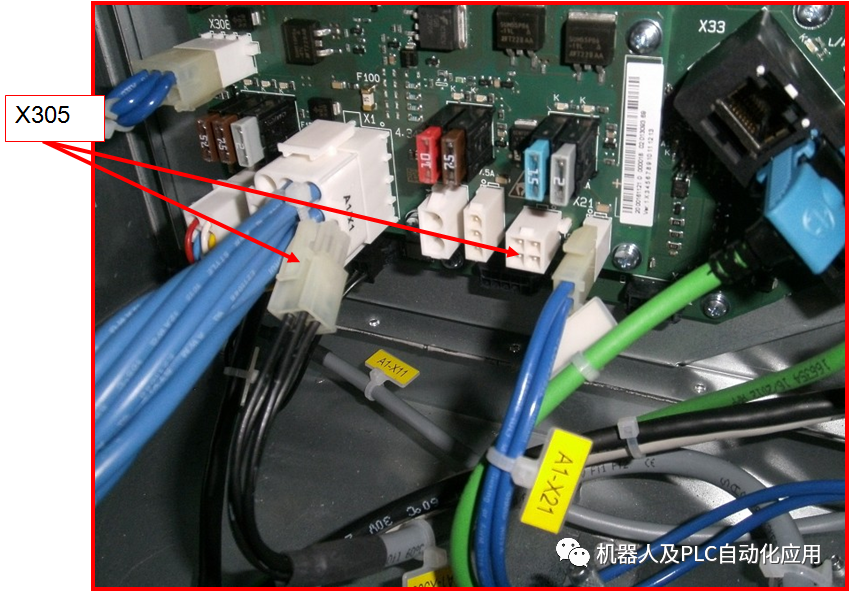
1.首次開機(jī)啟動(dòng),電池的電源線(X305)是沒有接的,需要插上,X305.
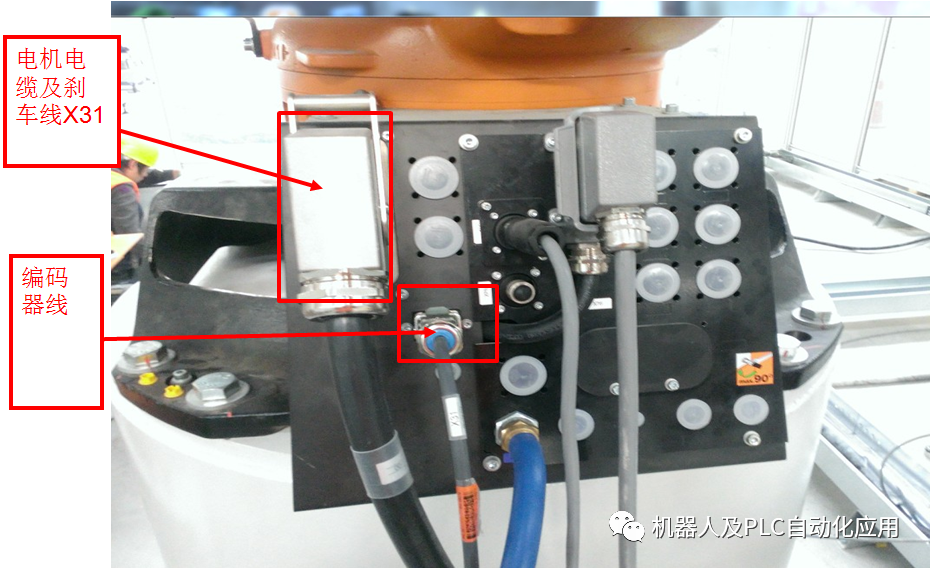
檢查機(jī)器人本體接線.
接線檢查完畢,打開開關(guān),順時(shí)針方向,首次開機(jī)時(shí)間比較長,耐心等待.
機(jī)器人第一次上電,示教器有時(shí)會(huì)出現(xiàn)如下界面,屆時(shí)請耐心等待機(jī)器人最后的上電完成,進(jìn)入到KSS系統(tǒng)里,圖片如下:正在升級(jí)smartPAD與PC系統(tǒng)向匹配.

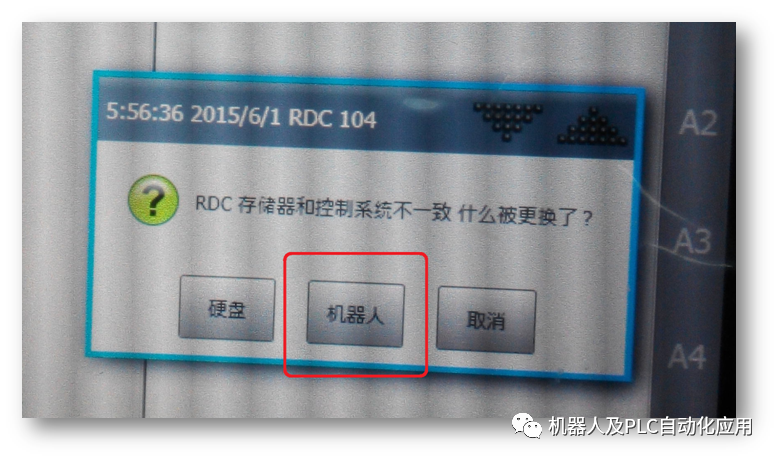
首次開機(jī)頁面,顯示以下查詢:RDC存儲(chǔ)器和控制系統(tǒng)不一致 什么被更換了,用按鍵 機(jī)器人確認(rèn), 顯示以下信息:網(wǎng)絡(luò)配置已還原.用按鍵OK確認(rèn)。用按鍵 全部OK確認(rèn)在信息窗口可以被確認(rèn)的所有信息
使用專家盤,登陸專家用戶
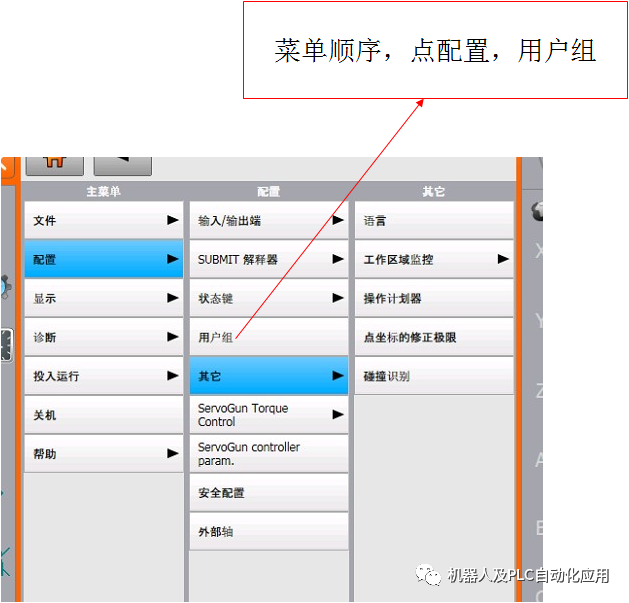
進(jìn)入菜單“主菜單>配置>安全配置”,如果有彈出如下的界面,單擊“是”,如圖
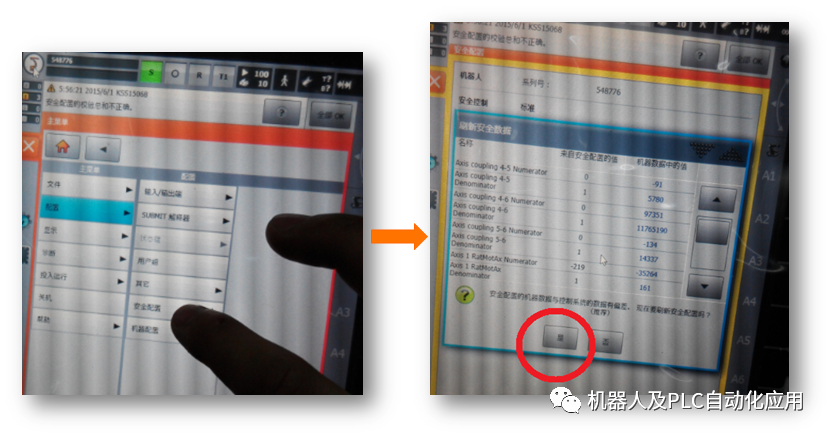
選擇刷新安全數(shù)據(jù)!
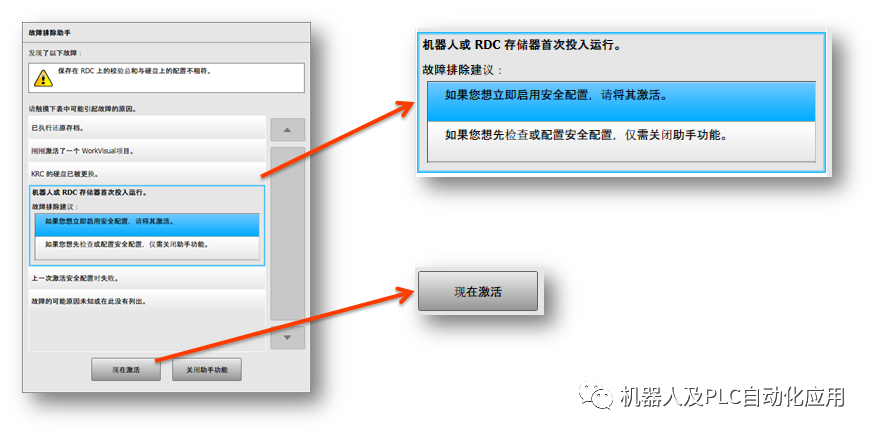
激活"投入運(yùn)行模式"

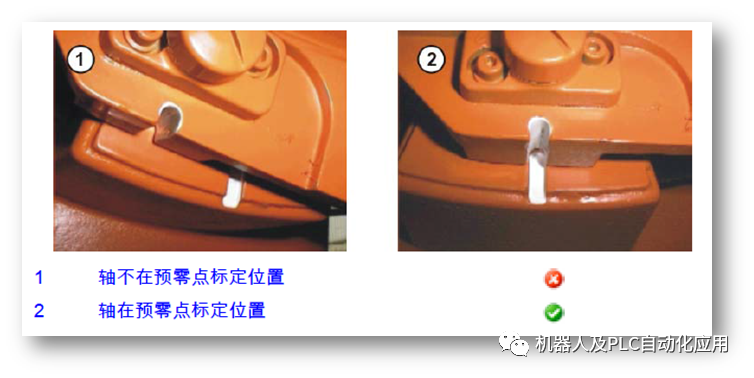
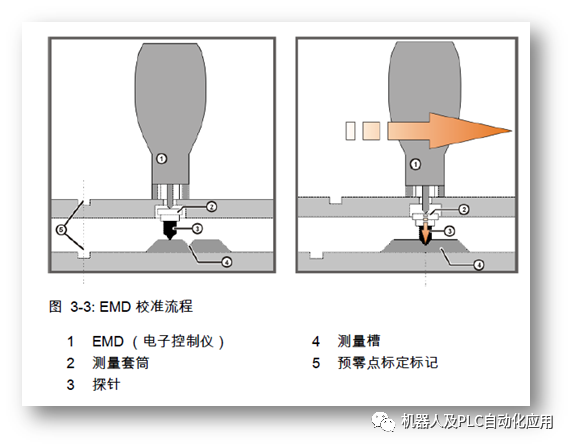
使用EMD逐個(gè)軸進(jìn)行零點(diǎn)校正.
主菜單>投入運(yùn)行>售后服務(wù)>HMI最小化
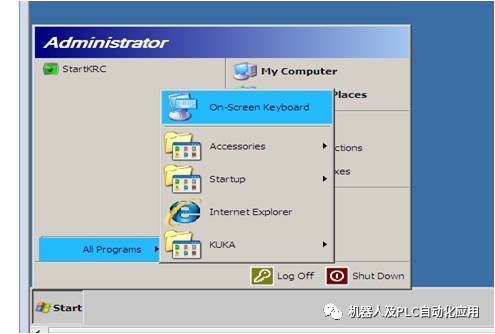
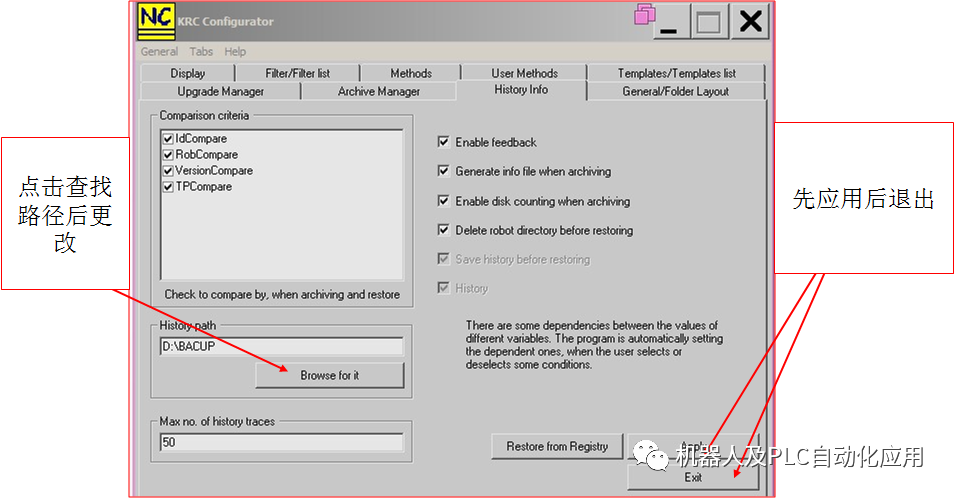
然后找到路徑C:KRCUTILKRCCONFIGURATOR
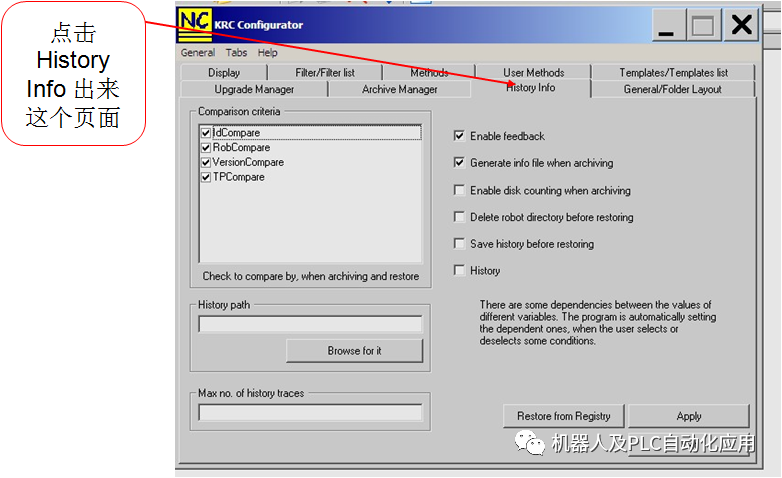
打開KrcConfigurator.exe程序
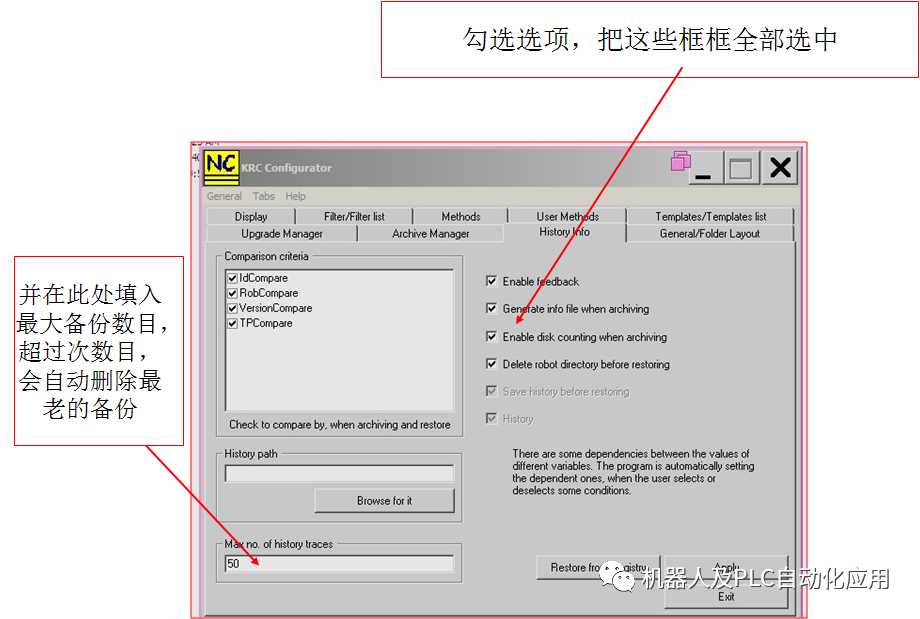
更改保存路徑,改為U盤保存,點(diǎn)擊Apply應(yīng)用下,點(diǎn)擊Exit退出程序。
選中dateand time后點(diǎn)擊左上角file,選擇open及打開.
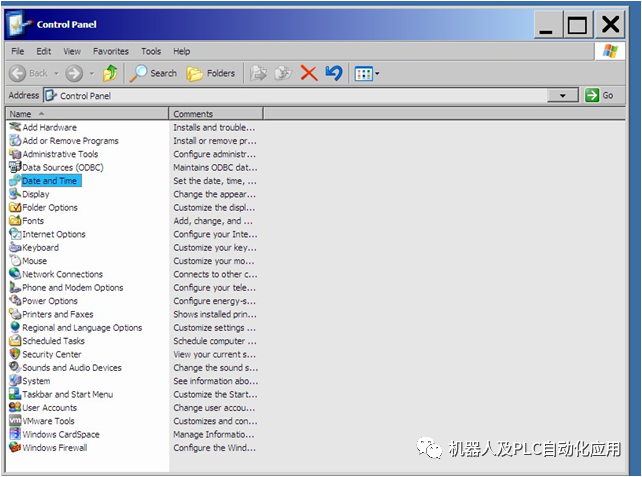
更改機(jī)器人時(shí)間
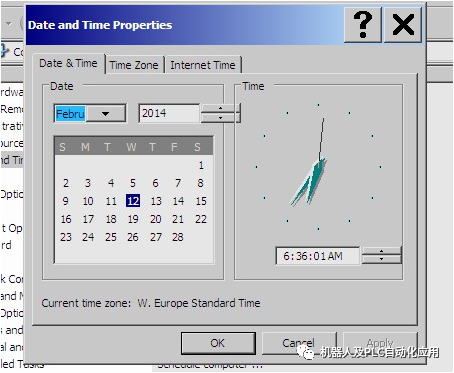
點(diǎn)時(shí)間按鈕就顯示剛剛設(shè)置的時(shí)間了.

如果是8.2大眾系統(tǒng)有時(shí)需要選擇復(fù)制機(jī)器人參數(shù),在硬盤中尋找與實(shí)體機(jī)器人型號(hào)相同的型號(hào)文件.
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31272瀏覽量
223251 -
文件
+關(guān)注
關(guān)注
1文章
596瀏覽量
26101 -
KUKA
+關(guān)注
關(guān)注
3文章
218瀏覽量
17499
原文標(biāo)題:KUKAC4機(jī)器人初次上電
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
機(jī)器人餐廳
機(jī)器人視覺——機(jī)器人的“眼睛”
nao機(jī)器人與其他機(jī)器人的區(qū)別
機(jī)器人、協(xié)作機(jī)器人和移動(dòng)機(jī)器人,你分的清楚嗎
機(jī)器人基礎(chǔ)書籍
ABB機(jī)器人維修保養(yǎng)指南
庫卡KUKA機(jī)器人四種啟動(dòng)方式介紹
機(jī)器人的定義是什么?工業(yè)機(jī)器人的應(yīng)用有哪些?
什么是服務(wù)機(jī)器人
機(jī)器人是什么?
KUKAC4機(jī)器人焊鉗拉拽程序分析sg_fehler ()w

關(guān)于KUKAC4機(jī)器人測量工具坐標(biāo)的作用淺析




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論