") 使用IC 555的伺服電機(jī)控制
使用IC 555的伺服電機(jī)控制

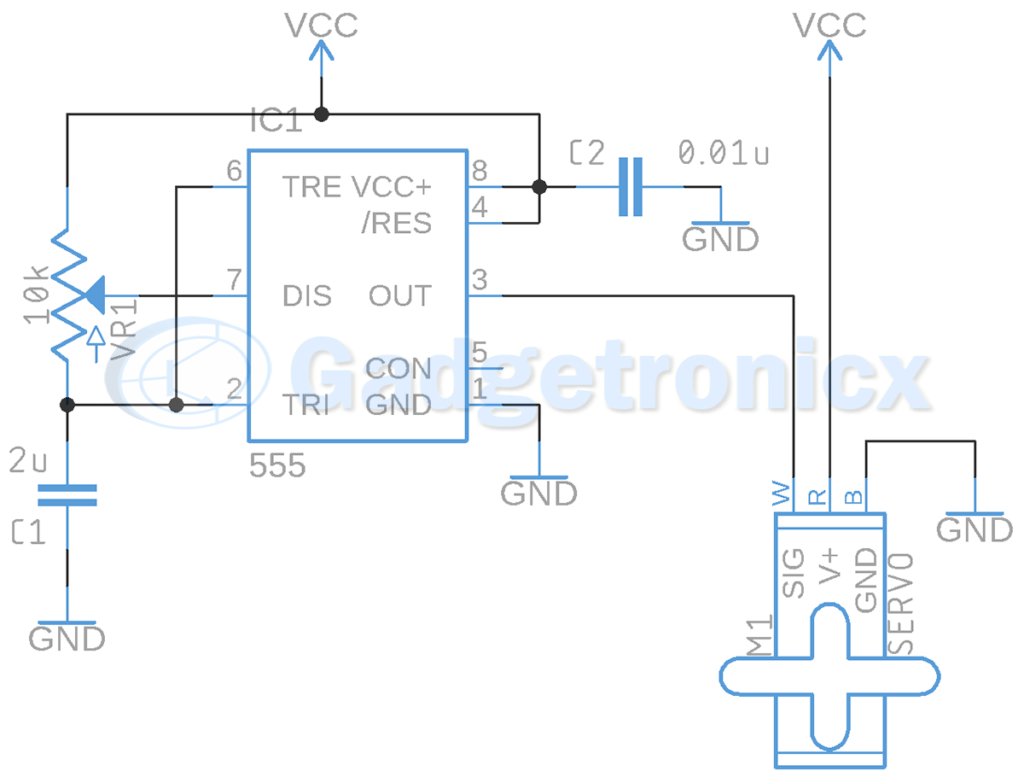
1.電路圖:
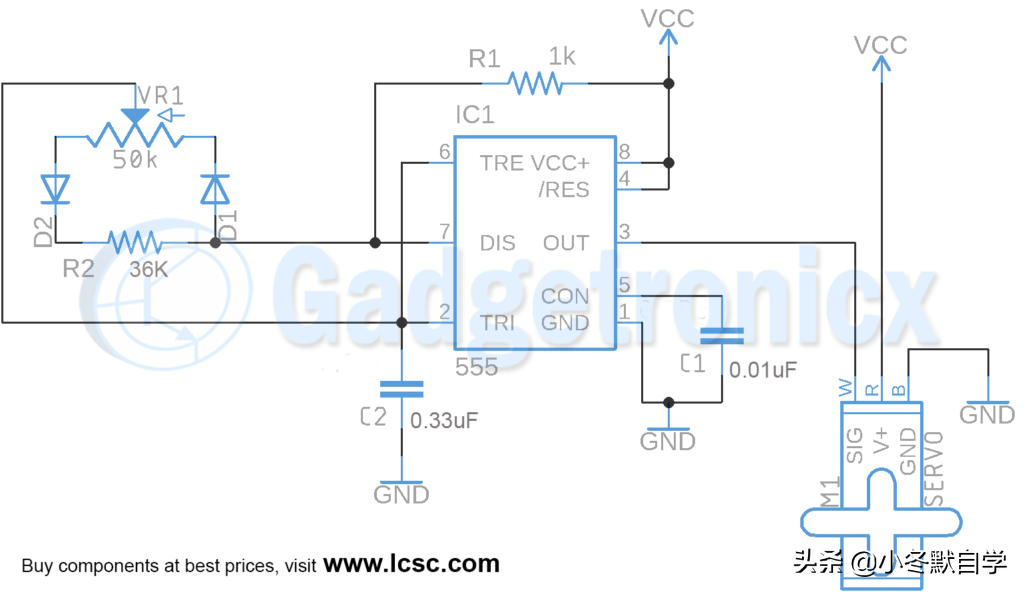
充電:電容器通過電阻R1充電,充電電流流過POT VR1并繼續(xù)充電C2,因?yàn)?a target="_blank">二極管D1允許電流通過,同時(shí)二極管D2阻止該電流流過R2。在電容器C2充電期間,555的輸出將處于高電平狀態(tài)。
放電:電容器開始通過POT VR1放電,并進(jìn)入二極管D2到IC 555的引腳7,在電容器C2放電期間,555的輸出將處于低電平狀態(tài)。
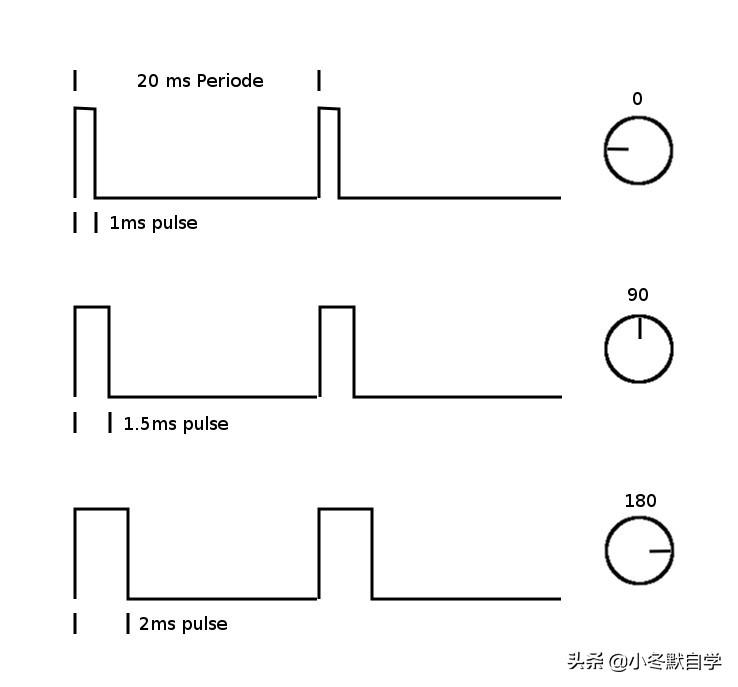
2.servo電機(jī)旋轉(zhuǎn)角度對(duì)應(yīng)的PWM寬度
它是50Hz的PWM信號(hào)。因此,時(shí)間段將為 1/50 秒或 20 毫秒。舵機(jī)的角度根據(jù)信號(hào)的導(dǎo)通時(shí)間段而變化
3.確定通斷時(shí)間(Determine the on-off time)
Ton TIME:
此高狀態(tài)的時(shí)間由公式確定
TON = 0.693 x ( R1 + VR1 ) C2
假設(shè)VR1調(diào)整為9K,替換上述公式中的值將產(chǎn)生
TON = 0.693 x ( 1K + 8K ) 0.33uF
= 0.693 ( 9k ) 0.33uF
= 2毫秒
因此,當(dāng)您將POT調(diào)整為8K時(shí),脈沖的導(dǎo)通時(shí)間將接近2ms,因此伺服器將旋轉(zhuǎn)約180。
Toff TIME:
在經(jīng)過2ms導(dǎo)通時(shí)間時(shí),IC 555的輸出將切換到低電平狀態(tài)。在這種狀態(tài)下,電容器開始通過POT VR1放電,并進(jìn)入二極管D2到IC 555的引腳7。為了確定TOFF時(shí)間,我們可以使用POT VR1和R2的值。POT VR1將表現(xiàn)出42K的放電電流,因?yàn)樗軌虮憩F(xiàn)出8K的充電電流(50K – 8K = 42K)。
TOFF = 0.693 x ( R2 + VR1 ) C2
= 0.693 x ( 36K + 42K ) 0.33uF
= 0.693 x ( 78K ) 0.33uF = 17.8 ms
以上結(jié)果顯示,關(guān)斷時(shí)間約為18ms。
-
電容器
+關(guān)注
關(guān)注
64文章
6960瀏覽量
107793 -
二極管
+關(guān)注
關(guān)注
149文章
10419瀏覽量
178527 -
PWM
+關(guān)注
關(guān)注
116文章
5872瀏覽量
225734 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9601瀏覽量
154162 -
伺服電機(jī)
+關(guān)注
關(guān)注
88文章
2186瀏覽量
61304
發(fā)布評(píng)論請(qǐng)先 登錄
如何使用PWM和555定時(shí)器IC電路來控制直流電機(jī)的速度
PLC控制伺服電機(jī)應(yīng)用實(shí)例
使用555 IC的PWM控制直流電機(jī)的速度

伺服電機(jī)的種類與區(qū)別_伺服電機(jī)最簡(jiǎn)單控制方法
PLC如何控制伺服電機(jī)?如何設(shè)計(jì)伺服系統(tǒng)?

如何使用IC555控制伺服電機(jī)的方向
基于IC555的伺服電機(jī)驅(qū)動(dòng)電路
PLC是怎么控制伺服電機(jī)的?
PLC怎么控制伺服電機(jī)
基于IC555的伺服電機(jī)測(cè)試電路



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論