") SEW-MOVIFIT? FC應(yīng)用程序解決方案“AMX1001”
SEW-MOVIFIT? FC應(yīng)用程序解決方案“AMX1001”

系統(tǒng)說明
應(yīng)用領(lǐng)域
目標(biāo)目標(biāo)是開發(fā)一種應(yīng)用程序解決方案,用于水平以及前后移動(V/R)的定位應(yīng)用程序。
該應(yīng)用程序解決方案基于“快速/爬行定位”的原理,為用戶提供了一個易于使用且有指導(dǎo)的啟動標(biāo)準(zhǔn)解決方案。
特點
該應(yīng)用解決方案具有以下特點:
? 快速/爬行定位
? 通過現(xiàn)場總線(PROFINET IO)控制
? 慢跑模式
? 用戶引導(dǎo)的啟動和診斷
OperatingModes操作模式
功能說明
選擇旋轉(zhuǎn)方向后,驅(qū)動器以預(yù)期的爬行速度沿相應(yīng)方向移動,直到取消選擇。通過以下方式選擇方向:
? 正點動 (CW)
? 負(fù)點動 (CCW)
如果沒有選擇方向或同時選擇了兩個方向,驅(qū)動器將停止。
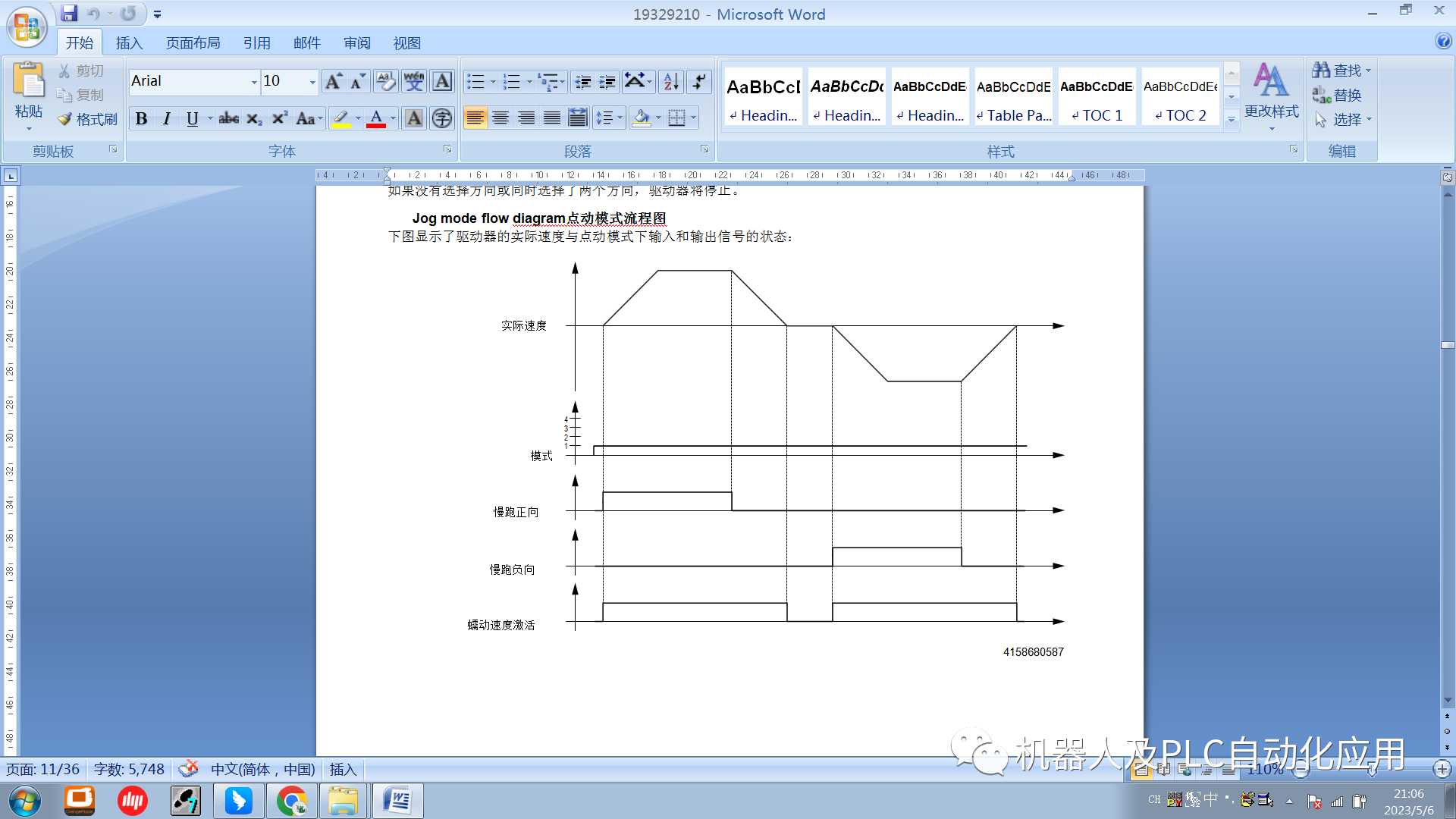
點動模式流程圖
下圖顯示了驅(qū)動器的實際速度與點動模式下輸入和輸出信號的狀態(tài):
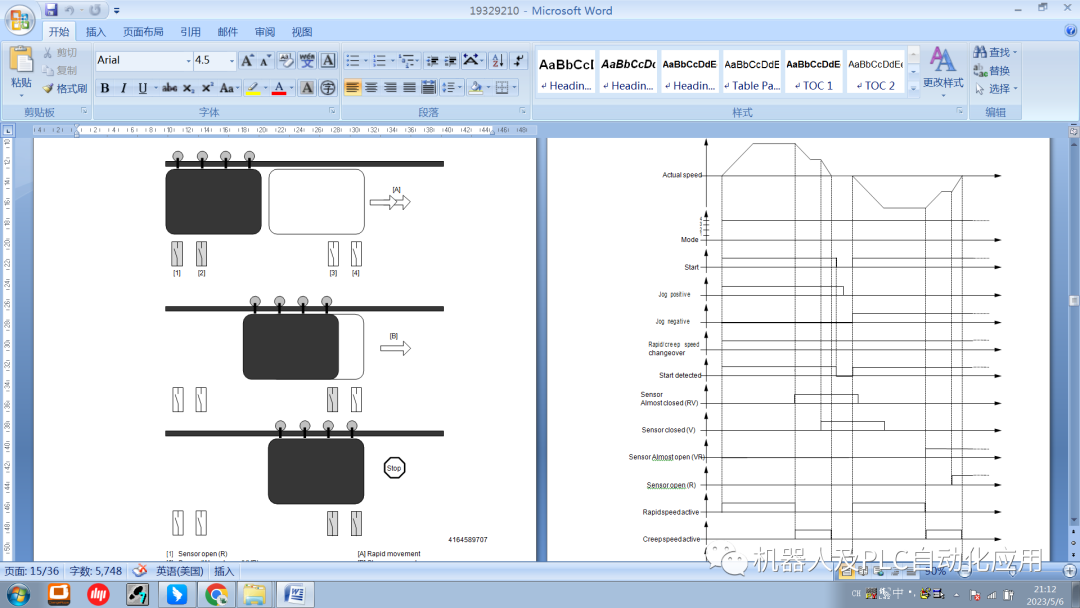
I向內(nèi)輸送(定位)/向外輸送
下圖為快速/爬行定位的典型應(yīng)用示例:
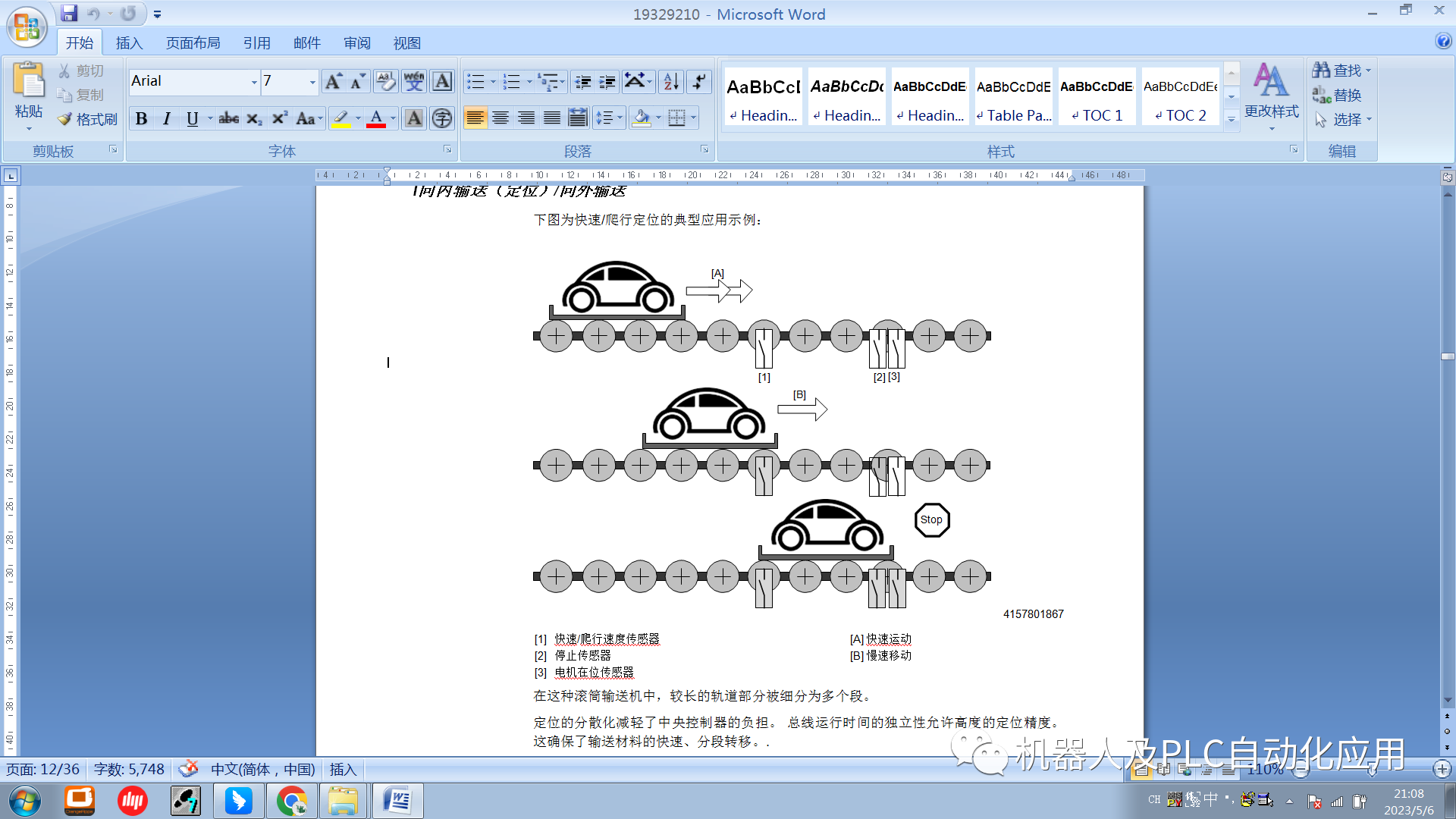
在這種滾筒輸送機中,較長的軌道部分被細(xì)分為多個段。
定位的分散化減輕了中央控制器的負(fù)擔(dān)。總線運行時間的獨立性允許高度的定位精度。這確保了輸送材料的快速、分段轉(zhuǎn)移。
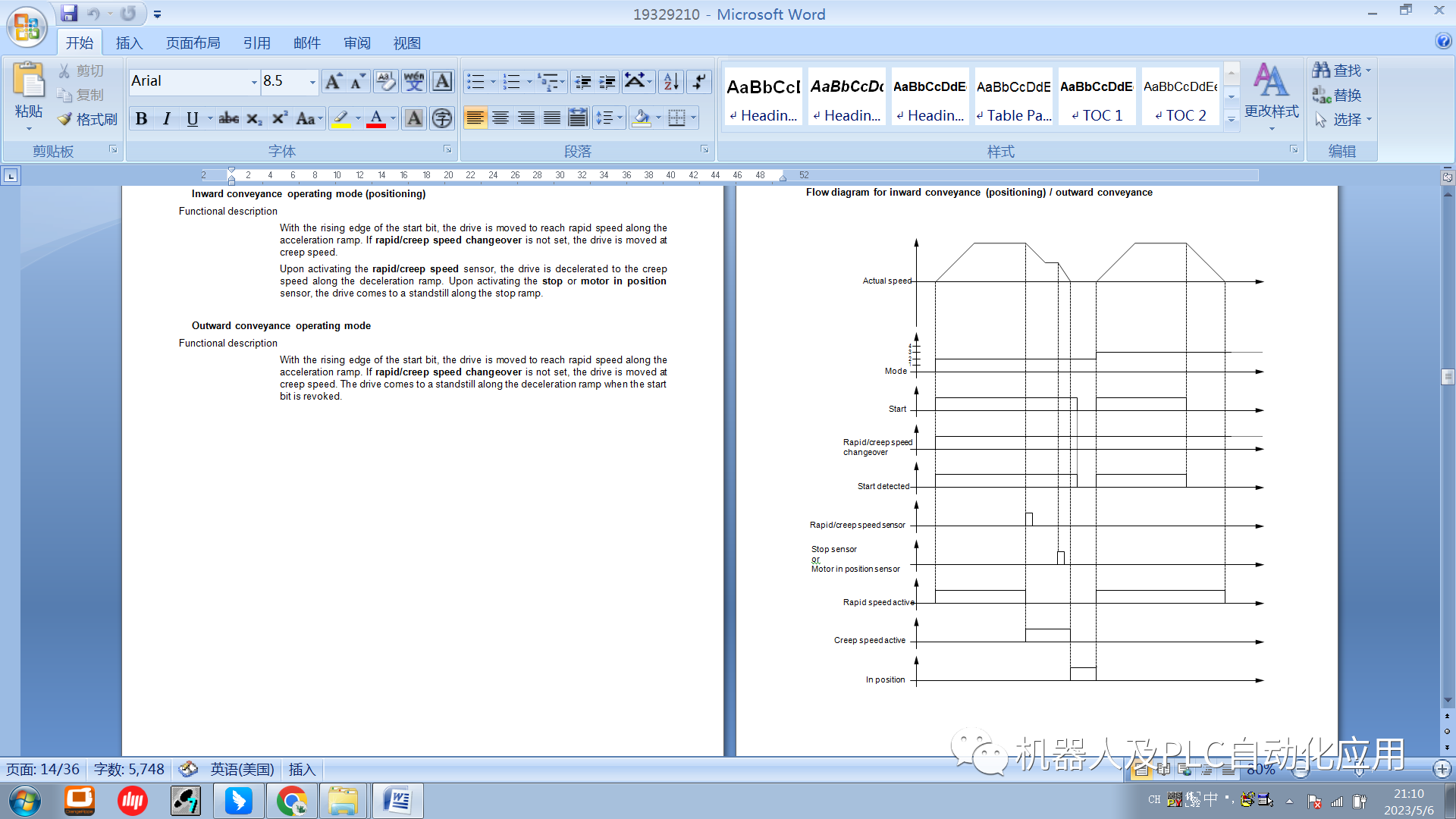
向內(nèi)輸送操作模式(定位)
功能說明
隨著起始位的上升沿,驅(qū)動器沿加速斜坡移動以達(dá)到快速速度。如果未設(shè)置快速/爬行速度轉(zhuǎn)換,驅(qū)動器將以爬行速度移動。
啟動快速/爬行速度傳感器后,驅(qū)動器沿減速斜坡減速至爬行速度。啟動停止或電機到位傳感器后,驅(qū)動器沿停止斜坡停止。
向外輸送運行模式
功能說明
隨著起始位的上升沿,驅(qū)動器沿加速斜坡移動以達(dá)到快速速度。如果未設(shè)置快速/爬行速度轉(zhuǎn)換,驅(qū)動器將以爬行速度移動。當(dāng)啟動位被撤銷時,驅(qū)動器沿著減速斜坡停止。
向內(nèi)輸送(定位)/向外輸送流程圖
V/R 模式
下圖顯示了V/R模式的典型應(yīng)用:
先決條件
根據(jù)機組文件中的安裝信息,檢查逆變器安裝、編碼器連接和控制器安裝。
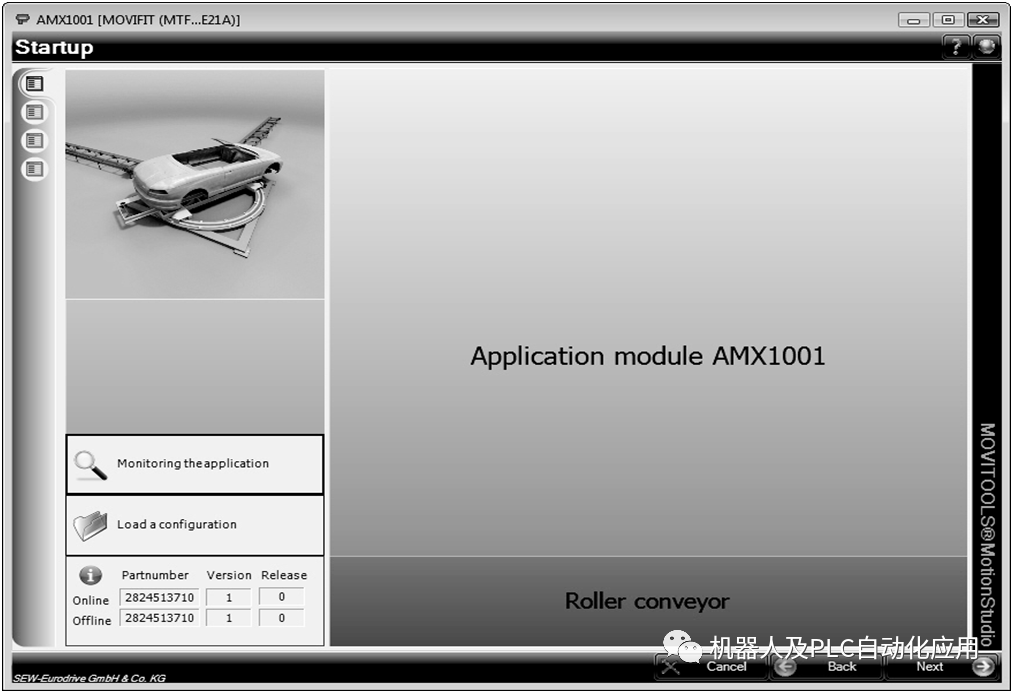
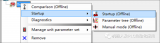
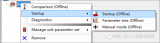
啟動應(yīng)用程序模塊
在Motion Studio中啟動啟動向?qū)АT撓驅(qū)г试S您執(zhí)行啟動、加載已保存的配置,或者如果您已經(jīng)執(zhí)行了啟動,則可以更改為監(jiān)視/控制模式。
透明的模式
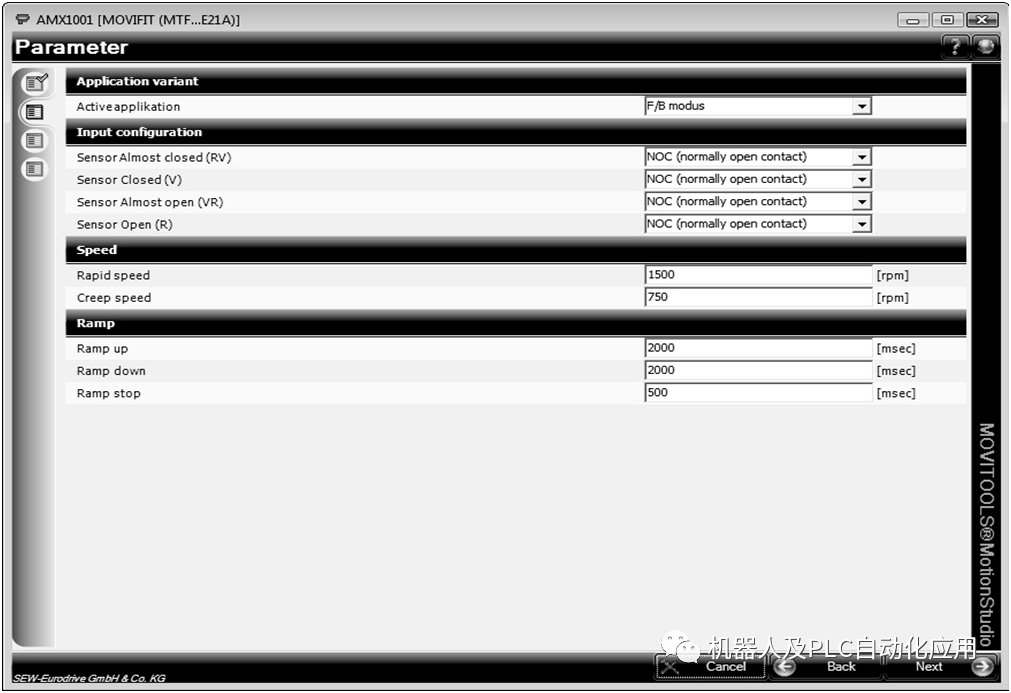
在“參數(shù)”窗口中,您可以通過“活動應(yīng)用程序”復(fù)選框為應(yīng)用程序解決方案選擇應(yīng)用程序變體。
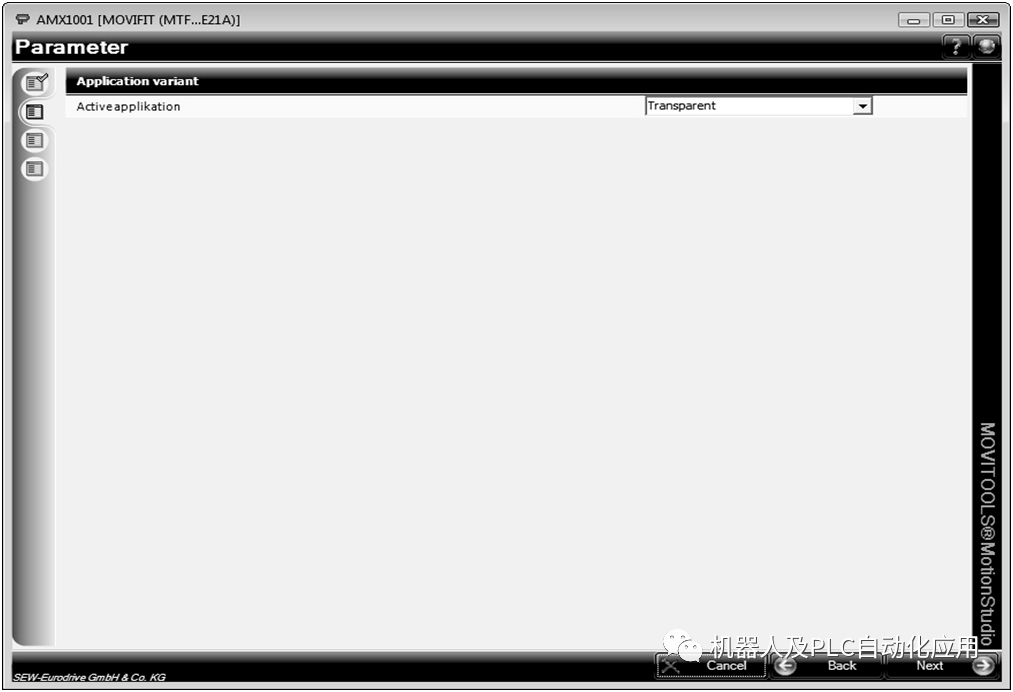
在“透明”模式下,應(yīng)用解決方案作為網(wǎng)關(guān)運行。與功率部分相關(guān)的三個過程數(shù)據(jù)字以透明方式傳輸。各個字的分配取決于功率部分的啟動參數(shù)(參數(shù)樹)。
滾筒輸送機
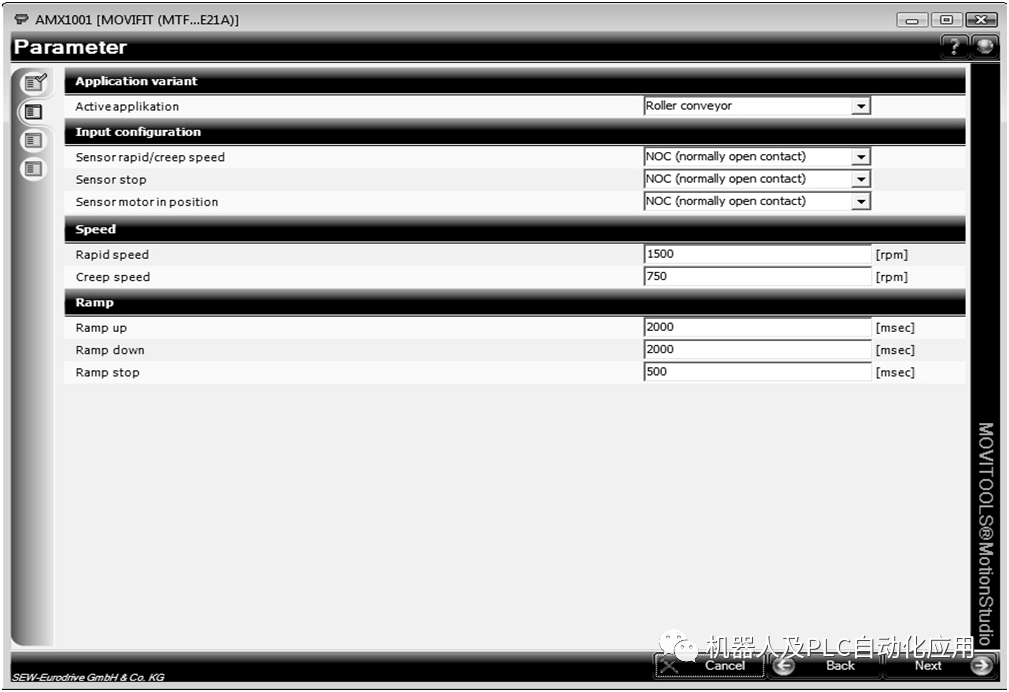
在滾筒輸送模式下,應(yīng)用解決方案實現(xiàn)了一個方向的快速/爬行定位。您可以從點動、向內(nèi)輸送和向外輸送的操作模式中進(jìn)行選擇。
操作需要以下設(shè)置:
? 限位開關(guān)的邏輯(常閉觸點/常開觸點)
? 相應(yīng)運行狀態(tài)的速度
? 開始和停止事件的坡道
V/R模式
在V/R模式下,應(yīng)用方案實現(xiàn)兩個方向的快速/爬行定位。您可以從操作模式 jog 和 V/R 模式中進(jìn)行選擇。
操作需要以下設(shè)置:
? 限位開關(guān)的邏輯(常閉觸點/常開觸點)
? 相應(yīng)運行狀態(tài)的速度
? 開始和停止事件的坡道
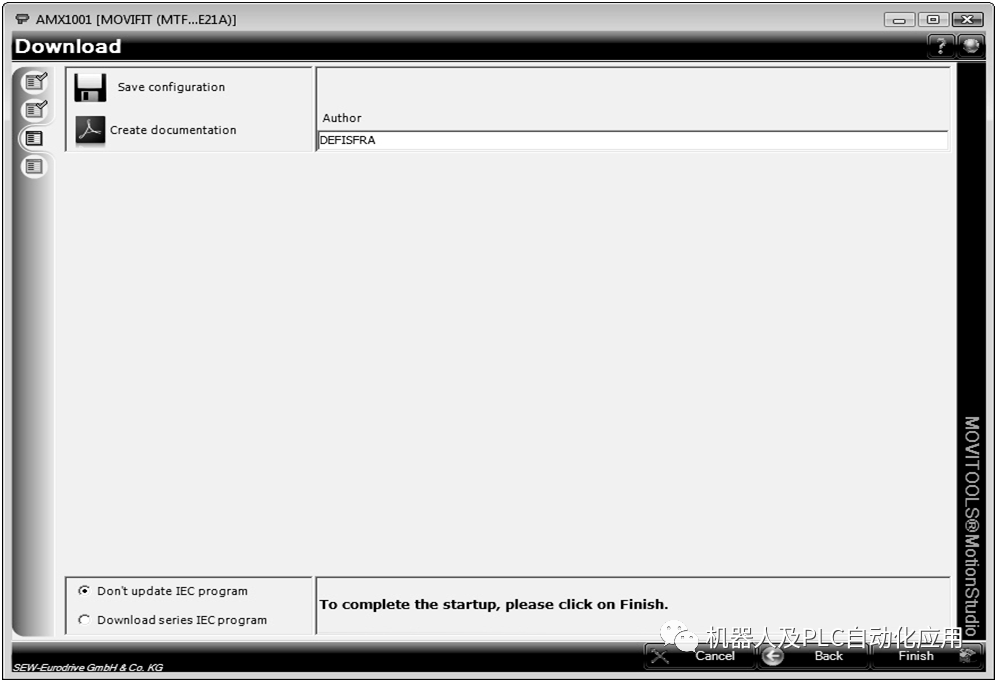
在“下載”窗口中,啟動完成。
| 控制元素 | 功能 |
|---|---|
| [保存配置]按鈕 | [保存配置] 按鈕可讓您將設(shè)置參數(shù)保存到配置文件中,以供其他啟動程序使用。 |
| [創(chuàng)建文檔]按鈕 | [創(chuàng)建文檔] 按鈕可讓您創(chuàng)建 PDF 文件,您可以將其打印出來。存儲所有設(shè)置參數(shù)。 |
| IEC 程序”單選按鈕 | 啟用“下載系列 IEC 程序”可讓您在重復(fù)啟動時再次傳輸 IEC 程序。 |
| [完成]按鈕 | [Finish] 按鈕可讓您將 IEC 程序和設(shè)置參數(shù)傳輸?shù)?MOVIFIT Technology 單元。完成啟動后,用戶界面將更改為監(jiān)控模式。 |
監(jiān)控模式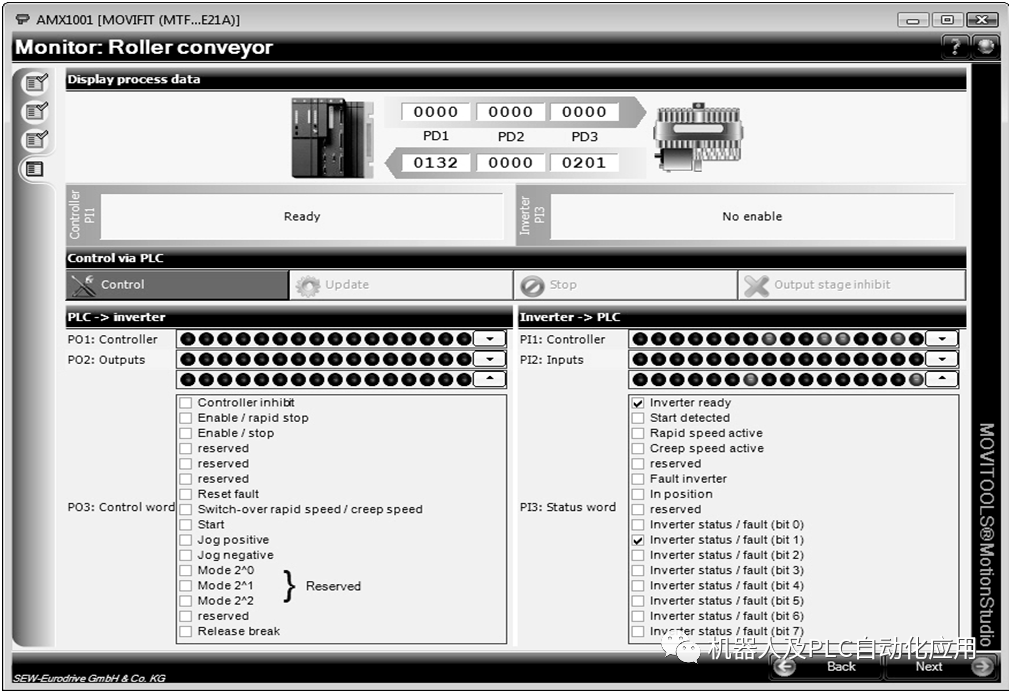
監(jiān)控模式可讓您監(jiān)控應(yīng)用解決方案的功能。
過程輸入和輸出數(shù)據(jù)以十六進(jìn)制顯示在窗口的上部。
此數(shù)據(jù)在窗口下部顯示為純文本:
過程輸出數(shù)據(jù)功能
PO1:控制器控制器的控制字
PO2:二進(jìn)制輸出數(shù)字輸出的控制
PO3:控制字應(yīng)用模塊的控制字
過程輸入數(shù)據(jù)功能
PI1:控制器的控制器狀態(tài)字
PI2:二進(jìn)制輸入二進(jìn)制輸入的當(dāng)前狀態(tài)
PI3:狀態(tài)字應(yīng)用模塊的狀態(tài)字
[控制]按鈕按下[控制]鍵可以切換到控制模式。
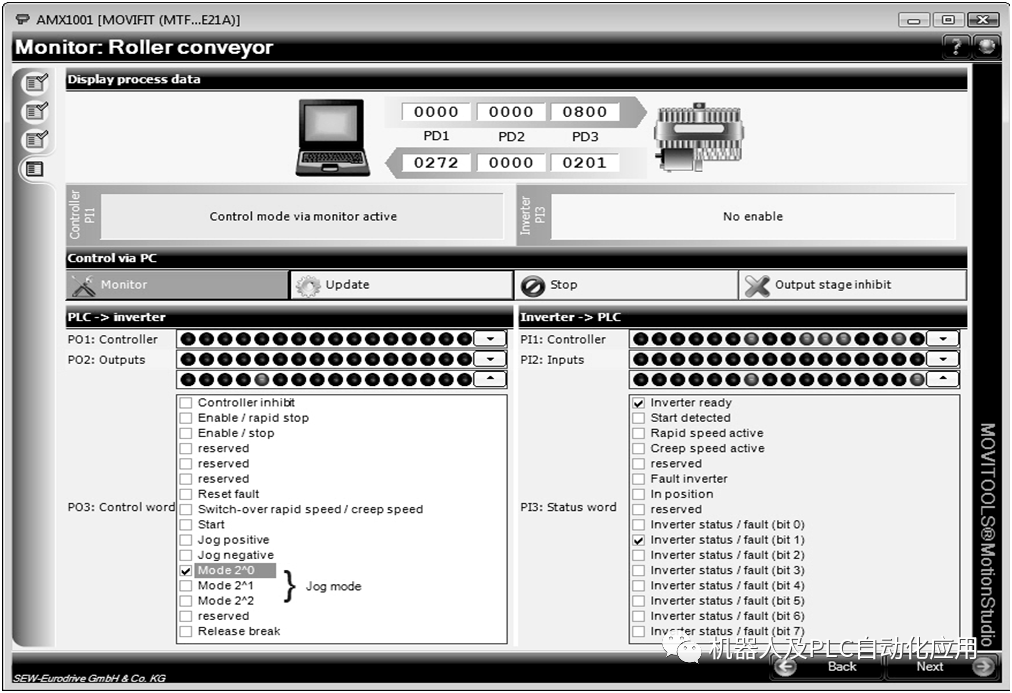
| [監(jiān)控]按鈕 | 按下[監(jiān)視器]按鈕可以切換到監(jiān)視器模式。 |
|---|---|
| [更新]按鈕 | 按下[Update](更新)按鈕可將修改后的設(shè)定值傳輸至MOVIFITTechnology(MOVIFIT? 技術(shù))單元。 |
| [停止]按鈕 | 按下[Stop](停止)按鈕可立即沿快速停止斜坡停止軸。 |
| [輸出級禁止]按鈕 | 按下[輸出階段禁止]按鈕可立即設(shè)置輸出階段禁止。 |
審核編輯:湯梓紅
-
驅(qū)動器
+關(guān)注
關(guān)注
54文章
9083瀏覽量
155504 -
監(jiān)視器
+關(guān)注
關(guān)注
1文章
805瀏覽量
35103 -
應(yīng)用程序
+關(guān)注
關(guān)注
38文章
3344瀏覽量
60253
原文標(biāo)題:SEW-MOVIFIT? FC應(yīng)用程序解決方案“AMX1001”
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
隱藏鼠標(biāo)指針應(yīng)用程序的解決方案
Google提供了許多應(yīng)用程序,可以為日常問題提供解決方案
MOVIFIT FC變頻器初始化步驟
滾床控制SEW變頻器MOVIfit的PLC控制/S11安全控制設(shè)置
滾床控制SEW變頻器MOVIfit的PLC控制/S11安全控制設(shè)置
SEW變頻器MOVIfit的PLC組態(tài)/S11安全控制設(shè)置流程分享
MOVIFIT更換EBOX+指示燈說明V1.30
SEW-MOVIPRO啟動應(yīng)用程序配置程序設(shè)置步驟
SEW-movifit變頻器的VR控制應(yīng)用分析

滾床控制SEW變頻器MOVIfit的PLC控制/S11安全控制設(shè)置V5.10
MOVIFIT FC變頻器初始化StartUp參數(shù)設(shè)置
SEW-movifit變頻器的調(diào)試-電機接線
OneInstall FC和NVMe FC驅(qū)動程序和應(yīng)用程序套件為Windows

SEW-MOVIFIT配置單元備份



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論