 基于無人機遙感的喀斯特高原峽谷區火龍果單株識別提取方法
基于無人機遙感的喀斯特高原峽谷區火龍果單株識別提取方法

引言
火龍果作為熱帶、亞熱帶地區的典型經濟作物,具有極強的經濟價值,如何快速、精準識別提取植株能為火龍果產業估產、監測提供技術支撐,實現農業的“粗放”向“精細”轉型。精準農業已經成為當今世界農業發展的新趨勢,也是中國現代化農業發展的主流方向,尤其可以為喀斯特高原峽谷區有限的土地空間提供科學、量化的管理與利用。
無人機遙感是指利用先進的人機分離操控技術,GPS差分定位技術,搭載不同的傳感器,按需自動快速獲取高分辨率影像的新興應用技術。隨著小型無人機技術的日臻成熟,無人機作為一種新型的低空遙感平臺,因其在低空飛行可避開云霧的影響、成圖周期短、分辨率高、機動性強、靈活性好、造價低且方便攜帶等的優勢,有效地彌補了傳統衛星遙感在喀斯特高原峽谷區獲取影像受云層遮擋和地形影響的不足,在諸多領域得到了廣泛應用。
國內外學者基于無人機可見光影像研究作物的時間軸線主要從監測、分類到識別提取,前期集中在中、低分辨率尺度的監測;中期逐漸過渡到對地物的分類上。如部分學者充分利用可見光鏡頭紅(R)、綠(G)、藍(B)三波段研究了幾種主要的顏色植被指數并在應用中取得了良好效果。當下基于顏色指數的應用主要集中在對植被的識別以及地物分類上,在典型經濟作物的單株提取方面還未見更多的報道。
盡管學者們對無人機可見光影像從研究維度和形態方面做了大量基礎工作,但目前對于喀斯特高原峽谷區典型經濟作物的單株提取算法探討并不多。鑒于此,在前人研究的基礎上,本研究擬深度解析目前主要的5種可見光波段顏色植被指數(VDⅥ、ExG、ExG—ExR、NGRDI、GLI)應用于火龍果植株識別,進行作物閾值分割,并結合可視化空間建模工具模型構建器(ModelBuilder),構建火龍果單株提取模型,以期能獲得一種有效識別提取火龍果植株的方法,促進無人機遙感在喀斯特高原峽谷區的應用。
材料與方法
2.1 研究區、數據采集與處理
實驗數據包括火龍果航片與精度驗證數據,正射航片數據一般選天氣溫和的T12:00--14:00進行拍攝,此時太陽高度角基本垂直地表,可以減少因光線傾斜造成的作物陰影。其中,航片采集時間為2018—11.05T13:00,研究區為貴州省西南部關嶺縣以南、貞豐縣以北的北盤江流域喀斯特高原峽谷區火龍果基地,(圖1)。
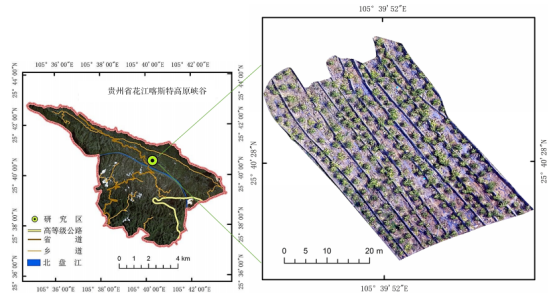
圖1 研究區無人機可見光影像
根據研究區地形條件與火龍果植株長勢特征,飛行高度設置80m、航向重疊度為75%、旁向重疊度為70%,拍照模式為定點懸停拍攝。影像拼接內容主要包括航片糾正、空三處理和精度評估等。影像預處理主要糾正航片獲取過程中因無人機抖動產生的變形、扭曲、失真、模糊和噪音,并對其進行圖像增強、整飾、裁剪、重建獲取研究區厘米級高分辨率影像。精度驗證數據以可見光影像為底圖、人機交互采集并于基地驗證獲取。
2.2 火龍果植株特征
火龍果主要分布于海南、廣東、廣西和貴州等熱帶、亞熱帶地區。植株種植行間距3mx2m,喜光耐陰、耐熱耐旱、喜肥耐瘠,形態呈星狀分布,以支撐柱為中心向四周延伸,葉片棱常為翅狀,邊緣波狀或圓齒狀,顏色呈淡藍色至深綠色(圖2一a,植株分支較多,郁閉度較高,分離度較好,影像獲取時火龍果處于掛果期,植株枝繁葉茂,且季相正值秋末冬至,雜草多半枯死,形成僅包含目標地物與裸地的相對理想的研究環境,利用ENVl5.3中的光譜曲線工具多次對比驗證得到火龍果在綠波段高反射、藍波段高吸收,裸地在綠波段高吸收的特性,描繪出火龍果與裸地波普曲線(圖2一b、C,綜上特征,基于可見光影像構建RGB三波段植被指數識別提取單株火龍果可行性增強。
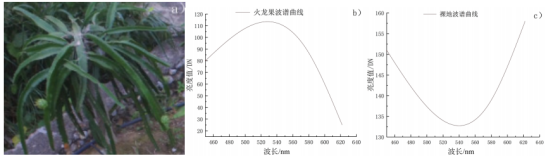
圖2火龍果植株樣例(a)、其波譜曲線(b)及裸地波譜曲線(C)
2.3 研究方法
2.3.1 火龍果植株識別指數
可見光波段差異植被指數(VDVI)的構建是參照當前最流行應用的歸一化植被指數NDVI(的構造原理及形式

式中:ρNIR為近紅外波段;ρR為紅光波段。充分考慮植被對可見光綠波段的強反射,紅、藍波段的強吸收,以綠光波段ρG代替NDVI中的ρNm,以紅、藍波段組合(ρR+ρB)代替NDVI中的ρR,并將ρG×2使其在數值上與(ρR+ρB)相當,獲得VDVI植被指數公式:

式中:p占為藍光波段。過綠指數,ExG)主要用在自動分離作物與土壤方面,計算公式為:

式中:G為綠波段;R為紅波段;B為藍波段。歸一化綠紅差異指數(NGRDI)主要目的是消除不同輻照度對植被光譜特征的影像,使用綠光波段與紅光波段之差做歸一化比值指數,計算公式為:

ρG七PR過綠減過紅指數ExG—ExR作為一種改進的顏色指數,通過將ExG指數圖像相減,發現0閾值的ExG—ExR指數可以很好地將目標地物與背景分離,計算公式為:

綠葉指數(GLI)通過判斷紅、藍波段像元值(DN)的平均值是否大于綠光波段DN值來生成灰度圖像,并進行歸一化處理,使結果圖像的像元值在[-1,1]。一般隋況下,負值代表土壤與非植被區域,正值區域則為植被,計算公式為

式中:R、G、B表示紅、綠、藍3個波段的像元值,分別對應可見光無人機影像的Bandl、Band2、Band3。
2.3.2 閾值分割
1)雙峰直方圖雙峰直方圖有2個明顯的波峰,分別對應背景值與目標值較多數目的點,兩峰之間的峰谷即為劃分目標與背景的最佳閾值。理想的雙峰曲線有分明的波峰波谷,但地物受到多種背景因素的干擾,雙峰一般難達到理想效果。
2)最大類間方差(OTSU)OTSU算法是由日本學者OTSU于1979年提出的一種對圖像進行二值化的高效算法,也稱為最大類問方差法,它是按照圖像的灰度特性將其分為背景和目標2部分,其核心思想是當閾值礅目標與背景之間的類方差最大時,T為識別提取目標地物的最佳閾值。
2.3.3 火龍果植株單株提取
通過可見光波段植被指數方法識別分割出的火龍果植株區域,需進行再次分類去除星碎斑塊以及無關地物,結合ArcGIS工具的可視化空間建模模型構建器,提出一種以單顆植株平均面積分割株叢的思想,構建火龍果單株自動提取及精度驗證的快捷批處理模型(圖3)。
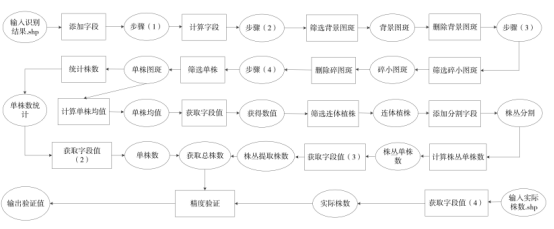
圖3火龍果植株單株提取及精度驗證模型
內容包括:
1)計算每塊矢量斑塊的面積;
2)篩選碎小斑塊以及背景圖斑并刪除;
3)判斷統計的植株圖斑是否分離徹底;
4)統計分離完好的單顆植株數量;
5)提取單顆植株的平均面積;
6)篩選連體圖斑并除以單顆植株面積獲得每一塊連體植株的分割數量;
7)統計單株數與連體分割數獲得總株數;
8)將提取的總株數與實際植株株數進行精度驗證,公式為:

N式中:尺表示正確率;M表示提取株數;N表示實際株數。火龍果植株單株提取技術路線如圖4。
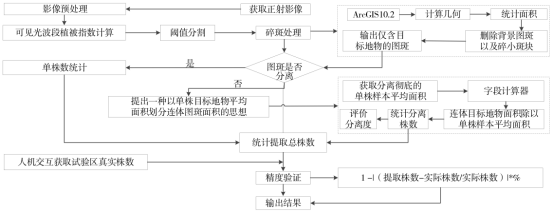
圖4火龍果識別提取技術路線
3、結果分析
3.1 植被指數計算及分析
利用ENVl5.3軟件中的波段計算工具分別代人式(2~6)計算5種植被指數,其中可見光波段差異植被指數(VDVI)需要轉化為浮點型計算,獲得各植被指數的灰度圖(圖5)。
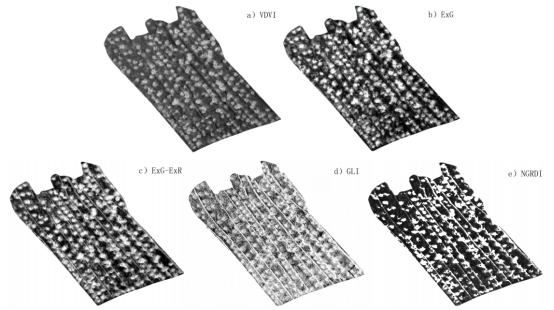
圖5可見光波段植被指數計算結果
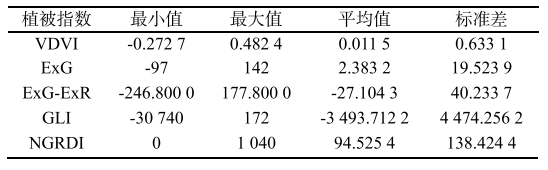
其中,圖5一a、b、c的白色或灰白色區域為目標地物,黑色區域為土壤、碎石、枯草和梯埂等背景值,目標地物與背景值有較明顯的區分界線,分離度較好,植被指數的大小與其色調的亮暗程度成正相關,色調越暗,植被指數越小,反之則越大。圖5-d中,植被指數提取結果混亂,目標地物與背景值分布零碎沒有明顯的分割邊界,圖5一e中白色區域混雜了目標地物與混凝土堆砌的梯埂,GLI和NGRDI顏色指數計算結果的目標地物與背景交叉嚴重,重疊現象明顯且標準差較大,反映了組內個體問的離散程度較大,在一定程度上說明了GLI與NGRDI并不適宜于火龍果的單株識別提取(表1)。
表1 各植被指數灰度特征值統計
3.2 闕值提取分析
從圖6可知,VDVI、ExG、ExG—ExR三種植被指數有較明顯的雙峰效果,可利用雙峰直方圖閾值分割方法獲取火龍果與背景值的分割閾值,而NGRDI與GLI的灰度直方圖雙峰效果不突出,因此使用自動閾值提取的最大類間方差法(OTSU)獲取其閾值(表2)。
表2各植被指數波段閾值

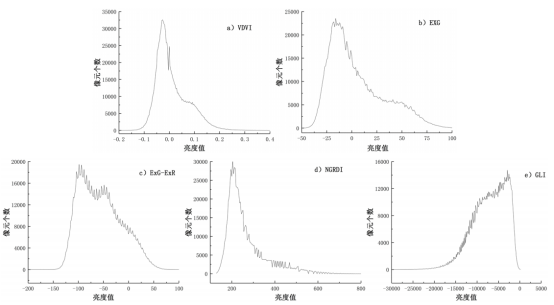
圖6可見光波段植被指數灰度直方網
通過對比雙峰直方圖與OTSU獲取的閾值(見表2)發現,其中VDVI通過OTSU方法獲取的閾值相較雙峰直方圖增加了0.0079,ExG減少了3.5495,ExG—ExR增加了17.4148,可見2種分割方法獲取的閾值并沒有完全疊合,但整體都處在一個相對穩定的波動范圍內。
3.3 植被識別指數比較分析
選取上述OTSU方法獲取的閾值,分別對5種指數進行目標地物與背景值的分割得到火龍果的識別提取(圖7),并進行特征值統計(表3)。
表3五種指數特征值統計

由圖7可見,VDVI與ExG相ELExG—ExR、NGRDI和GLI有明顯的分割效果,研究區像元數量總數為2199075,其中,VDVI提取的火龍果區域像元數量占整個研究區的13.94%,正確率為97.43%,Kappa系數為0.9607(見表3),火龍果識別度較高,且分離度也較好。ExG.ExR與GLI提取的火龍果區域像元數量超過了整個研究區的60%,正確率僅為42.57%、58.96%。顯然這2種指數把其他地物或背景值錯分成了目標地物,理論上可以判定這2種指數不適宜作為火龍果單株識別提取的方法。NGRDI的目標地物像元比例僅為6.61%,該指數漏提了大部分火龍果區域,把提取的部分目標區域歸為空值,獲取的最終值與真實值存在較大偏差。而ExG相較ExG—ExR、NGRDI、GLI雖然有明顯的識別提取效果,但與VDVI相比還是存在一定的漏提錯分現象。綜上所述,VDVI為火龍果單株識別提取的最佳指數。
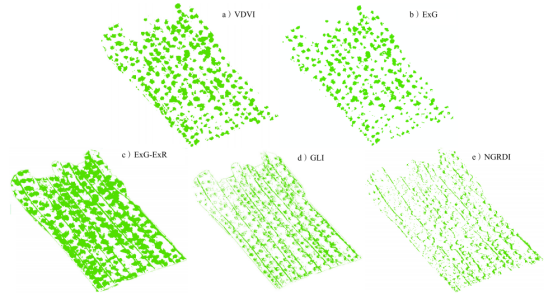
圖7火龍果區域識別結果
3.4 火龍果植株單株提取分析
通過VDVI指數的方法識別并分割出的火龍果植株區域,結合ArcGIS工具的可視化空間建模模型構建器,以單顆植株平均面積分割株叢,提取結果見圖8。
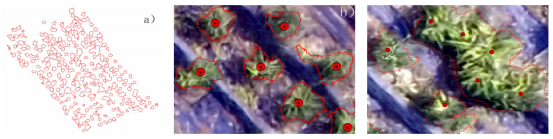
圖8火龍果分割效果(a.VDVI矢量斑塊;b.單株斑塊;C.株叢斑塊)
從表4可知,單株的平均面積為143.6821dm2,分離完好的單顆植株僅占總植株數的50.20%。研究區將近一半的植株處于連體狀態,連體植株的單塊面積最大值達到了1260.6204dm2,個別斑塊連體現象明顯,分離并不徹底(見圖8),其中植株的自然枝繁葉茂以及疏于管理造成的倒伏是導致植株連體現象的主要原因。自動提取的植株總數為320棵,人機交互野外驗證獲取的實際株數為295棵,自動提取的株數比實際株數多了25棵,代人公式(13)可得提取精度為91.7%,造成多提錯分的原因主要來源于連體植株的陰影及部分雜草的干擾,錯將其面積歸為目標地物。
表4 VDVI提取各指標特征值統計

4、結論
本文依托小型無人機平臺采集了喀斯特高原峽谷研究區厘米級的高分辨率影像,在分析目標地物與土壤、碎石和梯梗等背景的綜合光譜特征基礎上,利用VDVI、NGRDI、ExG、ExG—ExR和GLI等基于可見光波段的顏色指數分別對研究區高分辨影像進行實驗,根據提取結果特征統計,對t95種指數運用在喀斯特高原峽谷區典型經濟作物火龍果識別提取的適用性,使用雙峰直方圖和最大類間方差法(OTSU)進行閾值提取,獲得5種指數對目標地物與背景的最佳分割閾值,提出以單株平均面積分割連體植株的思想,結合模型構建器實現了對研究區目標地物的單株提取,提高了工作效率,為喀斯特山區典型經濟作物單株識別提取方法提供了參考。研究表明:
1)可見光波段植被指數(VDVI)相比其他4種植被指數(ExG、ExG—ExR、NGRDI和GLI)對研究區的目標地物識別效果最好;
2)通過人機交互野外驗證獲取實際株數與識別提取株數精度得出,自動識別提取的精度為91.7%;
3)使用基于可見光波段的顏色指數方法對喀斯特高原峽谷區典型經濟作物的精準識別提取是可行的。本文選取特殊地形地貌——貴州喀斯特高原峽谷作為研究區,使用小型無人機平臺采集影像數據的方案有效地彌補了喀斯特山區傳統衛星遙感獲取影像精度不足的缺陷。
本文實驗數據因其采集季相的特殊性,干擾雜物較少,分離度較高,識別提取的作物生長環境基本呈目標地物與裸地狀態,因而本研究方法目前僅適用于背景雜物相對干凈的區域。如何辨別雜草對目標地物的干擾以及不同生長環境地塊間的提取精度還有待進一步的研究。另外,如何結合深度學習與地物光譜特征提高識別提取精度也是未來研究的方向。
歡迎關注公眾號:萊森光學,了解更多光譜知識。
萊森光學(深圳)有限公司是一家提供光機電一體化集成解決方案的高科技公司,我們專注于光譜傳感和光電應用系統的研發、生產和銷售。
審核編輯黃宇
-
遙感
+關注
關注
0文章
258瀏覽量
17544 -
無人機
+關注
關注
236文章
11300瀏覽量
195708 -
高光譜
+關注
關注
0文章
479瀏覽量
10712
發布評論請先 登錄
新規落地后無人機起飛不難,如何通過3225封裝確保特種無人機系統穩定運行?

無人機智能巡檢系統的技術特點與應用優勢
無人機多光譜遙感在水生植被精細分類中的應用
什么是光伏區無人機智能巡檢系統?

離軸技術:賦能無人機精準配送的核心芯片應用
RK3576賦能無人機巡檢:多路視頻+AI識別引領智能化變革
科普|無人機反制槍介紹

無人機AI識別巡檢系統解決方案
愛普生M-G370PDF復雜地形下無人機飛行的卓越應用

無人機AI視覺行為識別系統
低空物流:無人機開啟未來配送新篇章
無人機AI視覺識別系統在智慧農業領域的深度應用
高光譜相機如何通過無人機實現地表精準遙感?





 工商網監
工商網監
評論