 工業機器人的組成、分類及其工作原理分別是什么?
工業機器人的組成、分類及其工作原理分別是什么?

一、工業機器人組成
工業機器人主要由主體、驅動系統和控制系統三個基本部分組成。
主體 – 即機座和執行機構,包括臂部、腕部和手部,有的機器人還有行走機構。大多數工業機器人有3-6個運動自由度,其中腕部通常有1-3個運動自由度;

驅動系統 – 包括動力裝置和傳動機構,核心為減速器以及伺服電機,用以使執行機構產生相應的動作;
控制系統 – 是按照輸入的程序對驅動系統和執行機構發出指令信號,并進行控制。
二、工業機器人分類
關于工業機器人的分類,國際上沒有指定統一的標準,可按負載重量、控制方式、自由度、結構、應用領域等劃分。
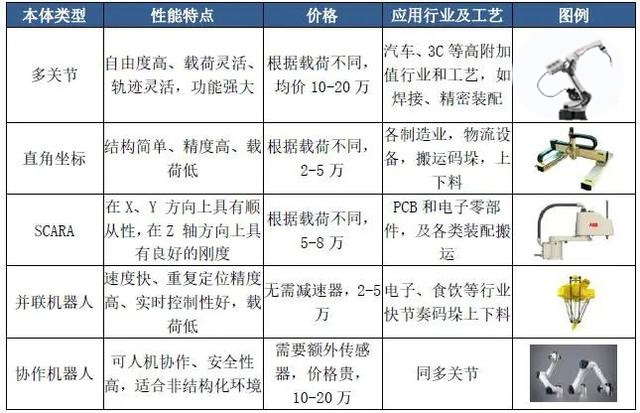
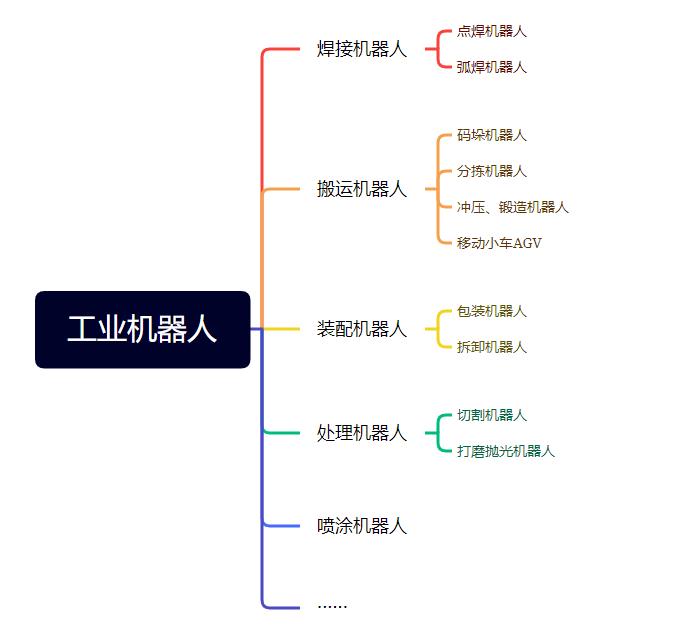
按照結構形態分類如下:
按照應用分類可以分為:焊接機器人、切割機器人、噴涂機器人、搬運機器人、裝配機器人、打磨機器人。
三、工業機器人工作原理
機器人的工作原理是一個比較復雜的問題。簡單地說,機器人的原理就是模仿人的各種肢體動作、思維方式和控制決策能力。
從控制的角度,機器人可以通過如下四種方式來達到這一目標。
“示教再現”方式:它通過“示教盒”或人“手把手”兩種方式教機械手如何動作,控制器將示教過程記憶下來,然后機器人就按照記憶周而復始地重復示教動作,如噴涂機器人。
“可編程控制”方式:工作人員事先根據機器人的工作任務和運動軌跡編制控制程序,然后將控制程序輸入給機器人的控制器,起動控制程序,機器人就按照程序所規定的動作一步一步地去完成,如果任務變更,只要修改或重新編寫控制程序,非常靈活方便。江蘇無錫專業工業機器人集成商,金紅鷹生產的機器人所用的工作方式多為示教再現和編程控制兩種,市場上大多數工業機器人都是按照這兩種方式工作的。
“遙控”方式:由人用有線或無線遙控器控制機器人在人難以到達或危險的場所完成某項任務。如防暴排險機器人、軍用機器人、在有核輻射和化學污染環境工作的機器人等。
“自主控制”方式:是機器人控制中最高級、最復雜的控制方式,它要求機器人在復雜的非結構化環境中具有識別環境和自主決策能力,也就是要具有人的某些智能行為。
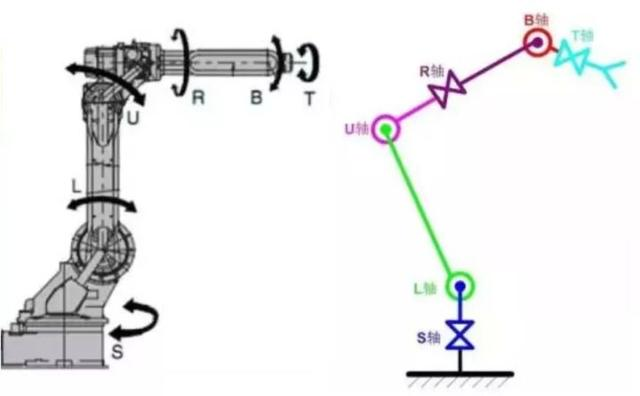
以六軸垂直多關節機器人為例(如下圖),通過機器人控制器及其控制系統,可實現S軸回旋,L軸下臂傾動,U軸上臂傾動,R軸手臂橫擺,B軸手腕俯仰以及T軸的手腕回旋,實現六個軸的動作操作與配合。
審核編輯黃宇
-
機器人
+關注
關注
213文章
31079瀏覽量
222253
發布評論請先 登錄
工業機器人TOP1,切入人形機器人賽道,意欲何為?

探索RISC-V在機器人領域的潛力
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
工業機器人的智能之選:永銘電容器解鎖性能潛能

機器人關節模組:類型、設計、工作原理及應用

工業機器人線束揭秘 | 性能加持助力機器人作業效率穩定躍升

機器人通信的貼身翻譯,PROFINET轉Ethercat網關的高能玩法
工業機器人的特點
工業通信界的“月老”:CC\\-Link IE和DeviceNet如何牽起機器人的“紅線”
工業機器人與協作機器人概念不同

盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
EtherCAT科普系列(7): EtherCAT技術在工業機器人控制系統領域的應用




 工商網監
工商網監
評論