 機器人各模塊設計中的發展趨勢
機器人各模塊設計中的發展趨勢

電子發燒友網報道(文/李寧遠)在工業機器人設計上,常分為控制器系統、機械手(驅動系統)、示教器、視覺與傳感器、末端執行器這幾個部分。機器人是一個非常復雜的系統,在機電一體化和功能性以及電氣方面存在許多設計挑戰,在設計機器人系統的構建塊時,需要了解這些方面的需求并選擇合適的設計思路。
不同控制器設計比較
大家都知道,控制器是機器人的核心,里面包括運動控制器、內部和外部通信系統以及任何潛在的功率級。這里多提一下潛在的功率級,這個概念指的是,如果機器人要移動重物需要在電機上施加足夠的力才能實現。這個力由電能產生,并從功率級提供給電機,這個功率影響機器人屬于高壓系統還是低壓系統。
控制器設計上有兩種思路,集中式和分散式。集中式的控制器設計將機器人的大多數電子模塊(驅動電源模塊、伺服驅動模塊、通信模塊、IO模塊)都集成在控制器中,大多機器人廠商會選擇這種設計,整體打包給下游廠商。

(協作機器人,TI)
分散式的控制器設計則是將集中式控制器里的一些模塊移出到機器人的末端操作系統中,一般都是將伺服驅動模塊移出來,這樣末端的執行器可以支持更多的外形尺寸,在電纜的選擇上靈活度也會高一些。分散式控制器設計的麻煩之處在于伺服驅動相關電子器件的運行環境與在集中式系統中完全不同,通常需要對部分系統進行重新開發。
安全緊湊的伺服驅動器設計
工業4.0引入了伺服驅動器的新準則和系統要求,因此,機器人設計人員選擇適合當前和未來伺服驅動器需求的解決方案非常重要。現在的機器人伺服驅動器功率級模塊設計,講究的是緊湊、高效而且受到全面保護,缺一不可。
現在機器人的功能安全標準之一IEC 61800-5-2定義了一種稱為安全扭矩關閉(STO)的安全功能,為的是系統可以安全停止電機并防止意外啟動。像工業機器人、工業移動機器人這種設備,一般為典型的供電電壓為48V至60V的直流饋電功率級,這對系統硬件尺寸有很強的約束條件。MCU或其他處理器生成PWM,三相功率級門驅動器控制功率開關,當從外部設備接收到STO命令時,激活脈沖抑制通道以斷開電源驅動與門驅動器的連接實現安全功能。
另一方面,既然涉及功率開關,那么使用SiC、GaN來提高電機控制性能也是完全可行的,能進一步提高機器人的功率密度和效率。這個老生常談的話題在機器人設計中就不再贅述。
低延時即時通信
軸數越多的機器人對網絡傳輸的要求越高,需要使用實時通信接口(如快速串行接口或以太網)實現精確、安全的運動,并在所有機器人系統之間實現即時通信。主處理器能夠支持多協議是十分必要的,如EtherCAT、PROFINET和EtherNet/IP等等,既能節省成本、縮減布板空間和減少開發工作量,還能更大限度地減少外部組件與主機之間通信的相關延遲。
另一方面,PHY的帶寬和延遲也會極大影響機器人整個運動中的協同性。盡可能在物理層設備上縮短延遲將大幅縮短控制器收集和更新所連器件的數據所需的時間,大大改善網絡更新時間。只要PHY的帶寬足夠,降低其延遲是提升多軸系統同步性很穩定的一個辦法。
精準傳感設計
在內部傳感上,目前幾乎所有用于機器人的傳感器件都是溫度敏感元件并且設置了熱補償,該趨勢大大提升了內部傳感應用的穩定性,消除了電機在重負載下的發熱與功耗的隱患。外部傳感上,隨著機器人技術的進步,融合傳感器技術也在進步,將不同的傳感技術結合起來,可在將機器人系統部署到變化的環境中時取得最佳效果。
小結
隨著制造業在各個層面的高度一體化程度不斷提高,機器人將在執行各種各樣的任務中越來越重要,機器人開發人員需要洞悉機器人設計的發展趨勢,使機器人實現準確、安全、具有成本效益的操作。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31079瀏覽量
222273 -
發展
+關注
關注
0文章
30瀏覽量
16127 -
模塊設計
+關注
關注
0文章
21瀏覽量
9907
發布評論請先 登錄
相關推薦
熱點推薦
人形機器人制造業領域應用的趨勢:技術突破與市場前景
領域的最新發展趨勢,以及它們如何推動社會和工業變革。 一、人形機器人制造業的技術進展 機器人感知與運動控制技術: 隨著計算機視覺、深度學習和傳感器技術的進步,現代人形機器人不僅能模仿人
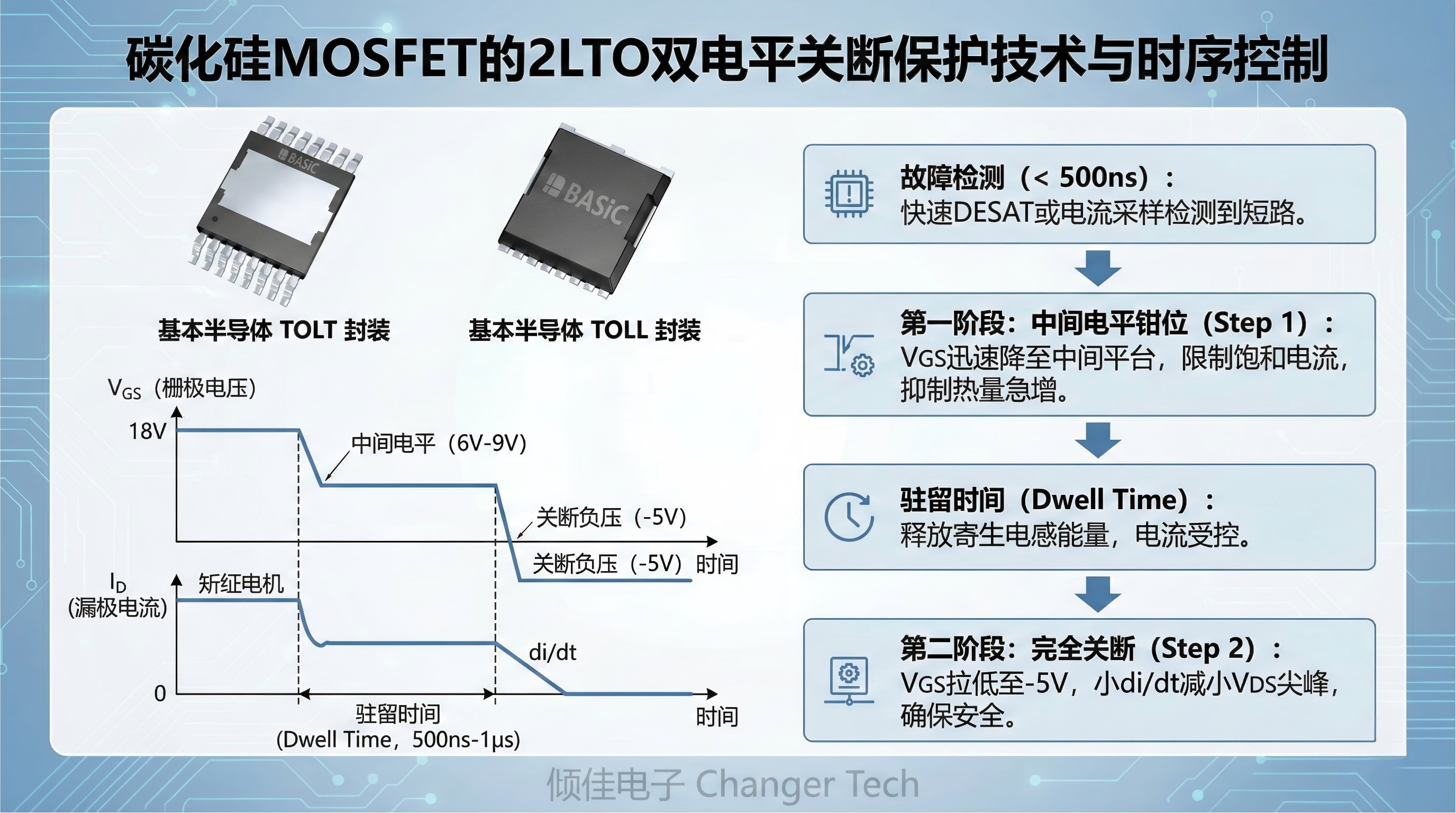
人形機器人電機伺服驅動技術發展趨勢及碳化硅SiC MOSFET在其中的應用
SiC MOSFET配合2LTO保護技術在人形機器人電機伺服驅動技術應用中的發展趨勢 傾佳電子(Changer Tech)是一家專注于功率半導體和新能源汽車連接器的分銷商。主要服務于中國工業電源
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
模塊基于歷史誤差趨勢自動擬合機器人位置反饋誤差模型,最終使裝配誤差穩定在 ±0.05 mm 以內。
整個系統架構緊湊、響應快速,為高精度裝配提供了可靠的技術底座。
四、面向未來的機器人
發表于 11-14 15:48
集成MT6701磁編芯片的機器人關節模塊化設計與驅動優化
隨著機器人技術的快速發展,關節模塊作為機器人的核心執行單元,其性能直接決定了機器人的運動精度和響應速度。近年來,磁編碼器因其非接觸式測量、高

具身機器人十大發展趨勢
在2025世界機器人大會開幕式上發布了《2025具身智能機器人十大發展趨勢》,以下為全文。趨勢一第一,物理實踐、物理模擬器與世界模型協同驅動的具身感認知。物理實踐是具身智能的本質,物理

機器人芯片:智能機器的“大腦”與未來趨勢
機器人技術的快速發展離不開核心硬件——機器人芯片。作為機器人的“大腦”,芯片決定了機器人的計算能力、響應速度和智能化水平。隨著人工智能(AI
智能制造工業機器人技術發展趨勢
(一)大范圍動態場景理解 工業機器人在自主制造場景中,對環境和運行狀態感知要求高,作業環境多變、狀態難測。需構建動態語義地圖,解決機器人精細化路徑規劃、協同作業控制難題,實時感知機器人
工業機器人的特點
的基礎,也是三者的實現終端,智能制造裝備產業包括高檔數控機床、工業機器人、自動化成套生產線、精密儀器儀表、智能傳感器、汽車自動化焊接線、柔性自動化生產線、智能農機、3D 打印機等領域。而智能制造裝備中工業
發表于 07-26 11:22
物聯網未來發展趨勢如何?
近年來,物聯網行業以其驚人的增長速度和無限的潛力成為了全球科技界的焦點。它正在改變我們的生活方式、商業模式和社會運轉方式。那么,物聯網行業的未來發展趨勢將會是怎樣的呢?讓我們一同探尋其中的奧秘
發表于 06-09 15:25
明遠智睿SSD2351開發板:語音機器人領域的變革力量
在人工智能快速發展的今天,語音機器人逐漸成為人們生活和工作中的得力助手。明遠智睿SSD2351開發板憑借強大性能與豐富功能,為語音機器人的發展
發表于 05-28 11:36
盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人
發表于 04-30 01:05
普渡機器人與德勤聯合發布服務機器人領域白皮書
服務機器人行業下半場的發展路徑,并首次提出了服務機器人行業的ESG實踐指引。通過系統性的數據分析和田野調查,白皮書深刻剖析了全球服務機器人行業的發展
什么是機器人?追蹤機器人技術的發展和未來
什么是機器人? 我們都知道“機器人”這個詞,并在日常對話中隨意使用它。但我們知道它真正的含義嗎?讓我們花點時間來深入研究機器人的定義。它是像看起來那么簡單,還是挑戰了我們的理解? 在其
工業電機行業現狀及未來發展趨勢分析
過大數據分析的部分觀點,可能對您的企業規劃有一定的參考價值。點擊附件查看全文*附件:工業電機行業現狀及未來發展趨勢分析.doc
本文系網絡轉載,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請第一時間告知,刪除內容!
發表于 03-31 14:35



 工商網監
工商網監
評論