") 基于Simplorer的永磁直流電機(jī)控制
基于Simplorer的永磁直流電機(jī)控制

1 概述
Ansys Simplorer是直觀易用、多物理域、多層次的系統(tǒng)仿真軟件,能夠幫助工程師實(shí)現(xiàn)復(fù)雜的高精度快速設(shè)計(jì)、仿真分析與優(yōu)化設(shè)計(jì),包括:電機(jī)、電磁、電源和其它機(jī)電一體化系統(tǒng)。Simplorer提供集成化的設(shè)計(jì)環(huán)境,滿足客戶對復(fù)雜系統(tǒng),如:機(jī)電部件、電力電子線路、系統(tǒng)級機(jī)電控制等,進(jìn)行高精度建模和仿真分析,并考慮部件和系統(tǒng)的相互影響的需求。強(qiáng)大的虛擬仿真技術(shù),可幫助用戶深入研究產(chǎn)品設(shè)計(jì)的每個(gè)方面,是開發(fā)復(fù)雜的電力推動(dòng)系統(tǒng)、電機(jī)及驅(qū)動(dòng)系統(tǒng)、以及新能源系統(tǒng)理想的設(shè)計(jì)工具,能在快速實(shí)現(xiàn)高精度設(shè)計(jì)的同時(shí),降低設(shè)計(jì)成本。
本文將構(gòu)建一個(gè)簡單的AC/DC 二極管整流器,為直流永磁電機(jī)供電,同時(shí)還將構(gòu)建一個(gè)完整的控制方案,用于在啟動(dòng)和突然負(fù)載變化的情況下驅(qū)動(dòng)電機(jī),對永磁直流電機(jī)進(jìn)行控制。
通過本文的學(xué)習(xí),讀者將了解到以下內(nèi)容:
(1)如何創(chuàng)建和使用數(shù)據(jù)集來指定組件屬性;
(2)如何在沒有物理線連接的情況下連接組件;
(3)如何在組件之間傳遞信息;
(4)如何使用不同的塊體來創(chuàng)建復(fù)雜的控制結(jié)構(gòu);
(5)如何在同一圖中繪制不同的數(shù)據(jù)(信號)。
2 實(shí)現(xiàn)方法
首先插入一個(gè)Simplorer的設(shè)計(jì)。啟動(dòng) Electronics Desktop,將項(xiàng)目另存為 WS_2_1.aedt,使用圖標(biāo) 插入Simplorer設(shè)計(jì),將設(shè)計(jì)重命名為DC_Motor_Control,使用圖標(biāo)
插入Simplorer設(shè)計(jì),將設(shè)計(jì)重命名為DC_Motor_Control,使用圖標(biāo)  再次保存項(xiàng)目。
再次保存項(xiàng)目。
項(xiàng)目另存為 WS_2_1.aedt
設(shè)計(jì)重命名為DC_Motor_Control
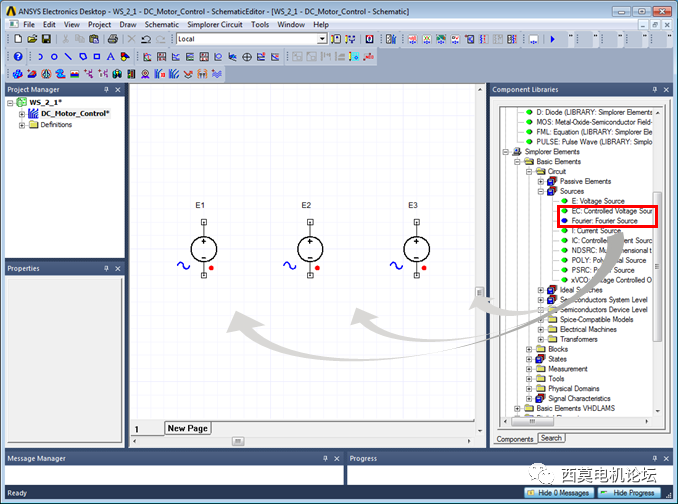
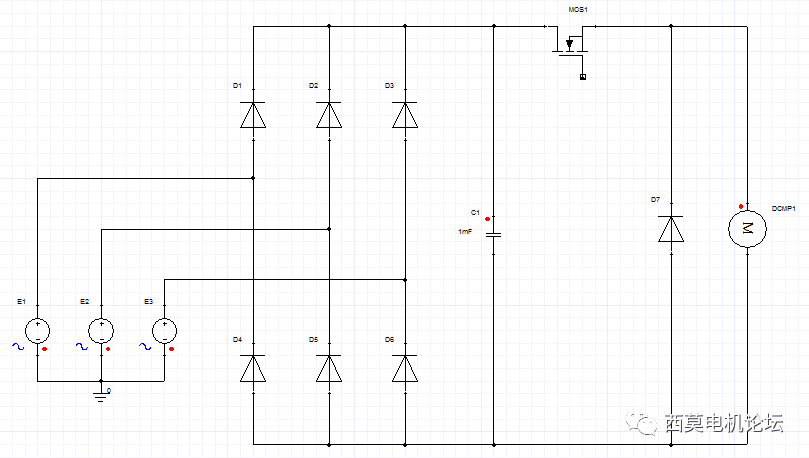
接著插入元件──電壓源。
在組件庫窗口中SimplorerElements>>Basic Elements>>Circuit>>Sources,選擇E:Voltage Source,將其拖放到Schematic中三次,雙擊電壓源 Voltage Source E1, 選擇TimeControlled>>Sine 使其成為正弦波,勾選Spice兼容,選擇RMS Value 值為 120Vac 頻率選擇 60Hz, 按OK確認(rèn),對E2和E3重復(fù)該過程,分別添加相位120度和240度。
Voltage Source
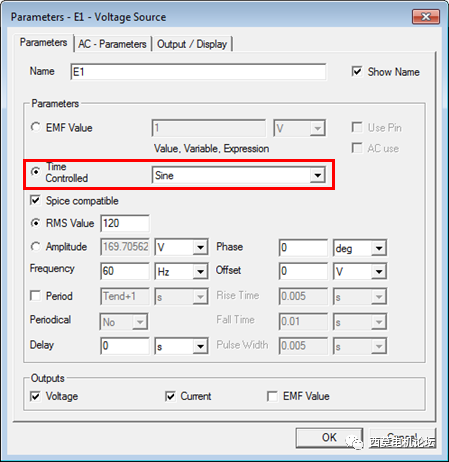
設(shè)置為Sine
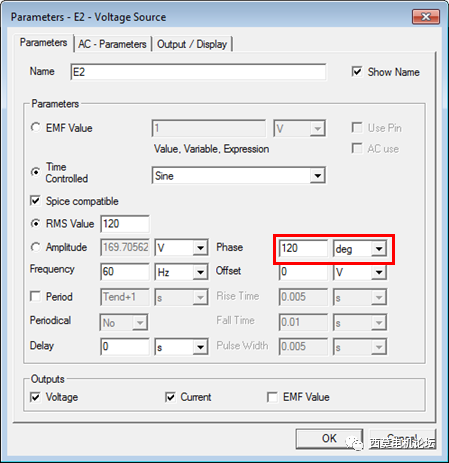
添加120度位
接著插入元件──二極管。
在組件庫窗口中SimplorerElements>>Basic Elements>>Circuit>>Semiconductor system Level,選擇二極管,將其拖放到原理圖中七次,按Esc鍵退出插入模式并使用快捷鍵 Ctrl+D 來適應(yīng)所有。
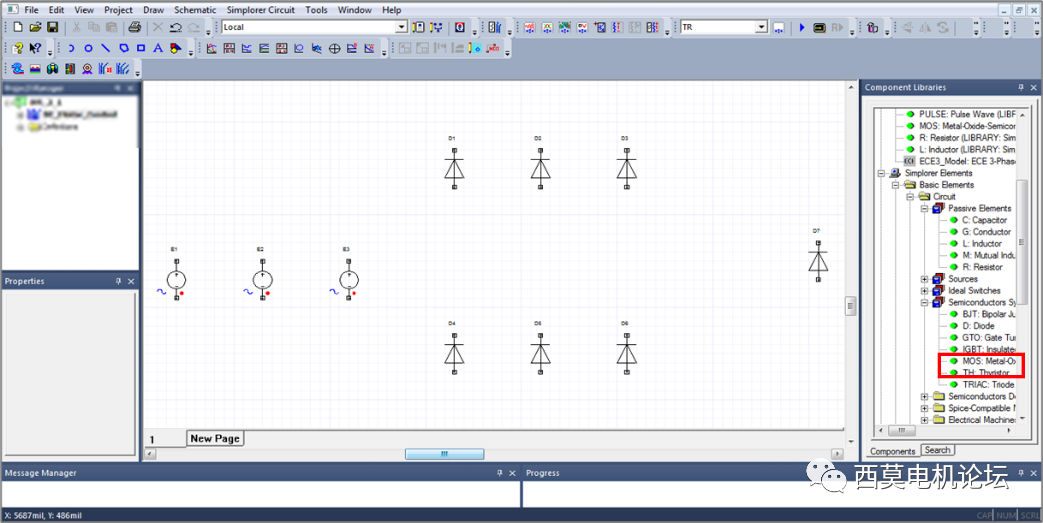
插入二極管
接著插入元件──電容器
在組件庫窗口中SimplorerElements>>Basic Elements>> Circuit>>Passive Elements,選擇電容器,將其拖放到原理圖中,按Esc鍵退出插入模式,雙擊電容器,將值更改為1mF,在可見性下的輸出/顯示選項(xiàng)卡中選擇電容值。
Passive Elements
插入電容器

電容值更改為1mF
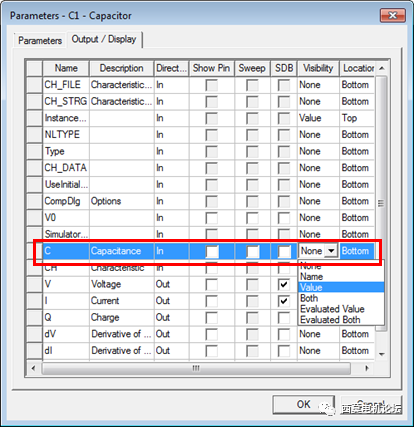
在可見性下的輸出/顯示選項(xiàng)卡中選擇電容值
接著插入元件──直流電機(jī)
選擇SimplorerElements>>Basic Elements>>Circuit>>ElectricalMachines>>DC Machine,選擇DCMP,將其拖放到示意圖中,按Esc 退出插入模式。使用3次快捷鍵 Ctrl+R 將 DCMP 組件逆時(shí)針旋轉(zhuǎn)270度,雙擊DCMP并設(shè)置RA=1.2ohm,LA = 9.5mH,KE=0.544Wb,J=0.004kgm2,如下圖所示。
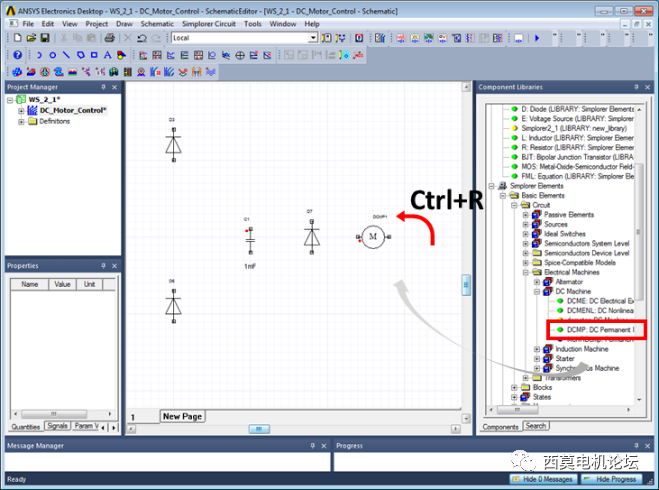
插入直流電機(jī)DCMP
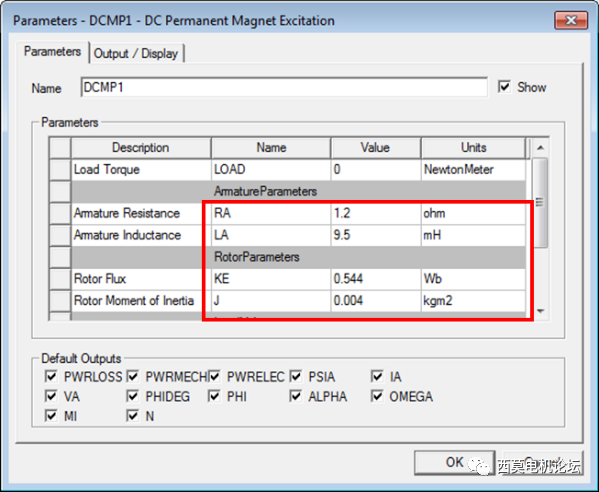
DCMP參數(shù)設(shè)置
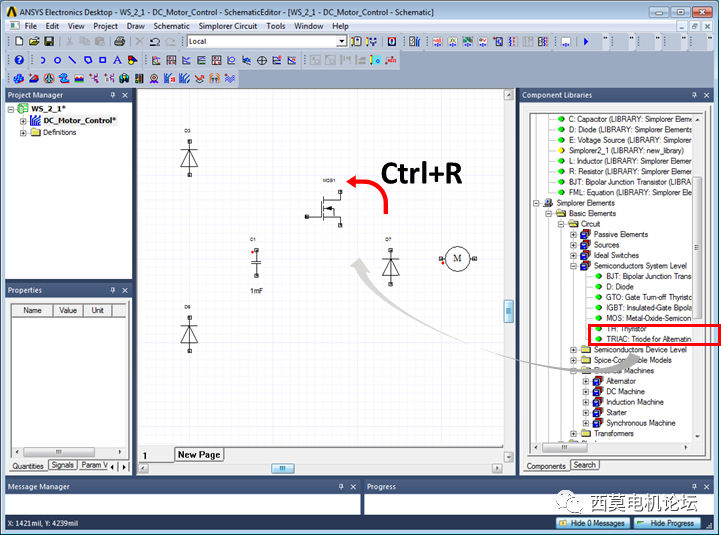
接著插入零部件──半導(dǎo)體開關(guān)(Mosfet)
在組件庫窗口中SimplorerElements>>Basic Elements>>Circuit>>Semiconductor system Level,選擇 Mosfet (MOS),將其拖放到 Schematic中,選擇MOS并使用快捷鍵 Ctrl+R將其逆時(shí)針旋轉(zhuǎn)90度,確保使用Pin被選中。
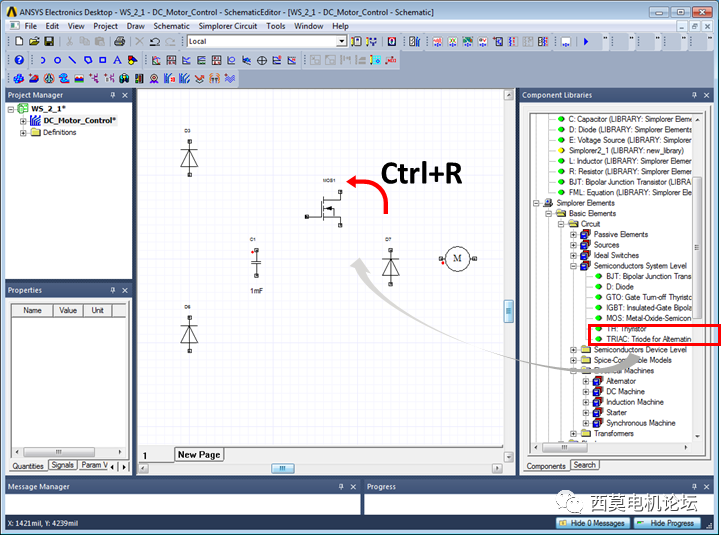
插入半導(dǎo)體開關(guān)(Mosfet)
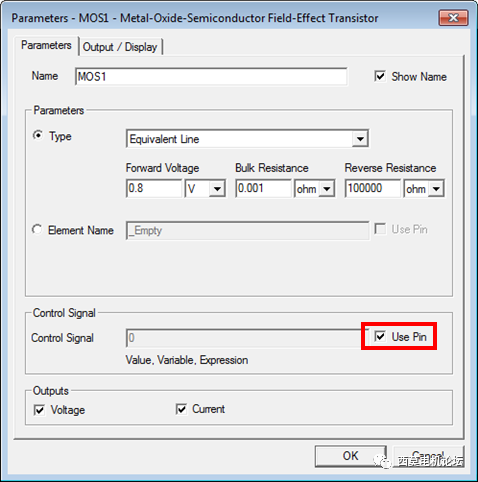
確保使用Pin被選中
接下來連接組件。
將鼠標(biāo)放在組件的一個(gè)終端上,鼠標(biāo)指針的形狀變?yōu)槭中危聪?LMB 并移動(dòng)十字直到下一個(gè)組件的連接端子。添加Ground節(jié)點(diǎn),單擊圖標(biāo)
 , 并將其放入Schemaic,連接所有組件,直到完成如圖所示的電路。
, 并將其放入Schemaic,連接所有組件,直到完成如圖所示的電路。
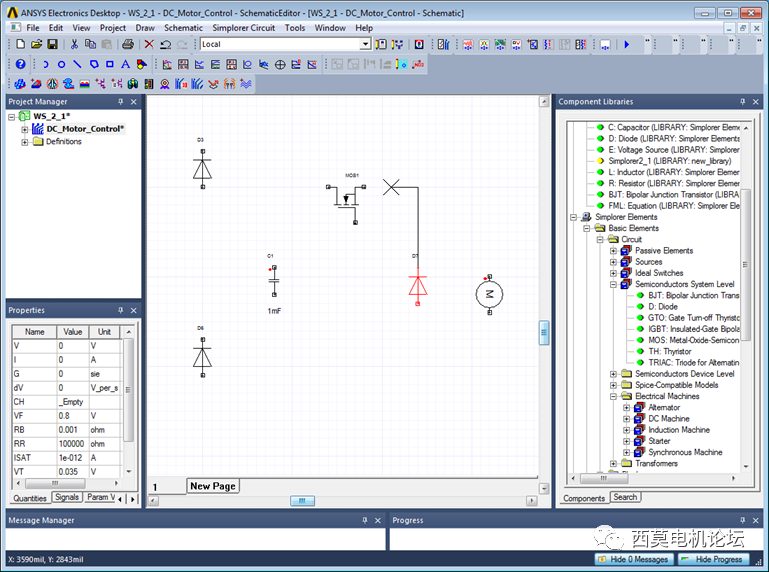
連接端子
接下來創(chuàng)建數(shù)據(jù)集。
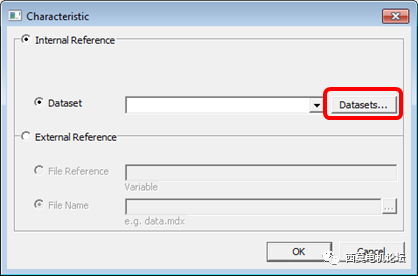
現(xiàn)在將創(chuàng)建一個(gè)數(shù)據(jù)數(shù)組,用于表示直流電機(jī)負(fù)載扭矩。在庫窗口Simplorer Elements>>Basic Elements>>Tools>>TimeFunctions,選擇DATAPAIRS組件,將其拖放到Schematic中,雙擊DATAPAIRS塊,將名稱更改為TorqueLoad,然后單擊Characteristic按鈕。選擇數(shù)據(jù)集...按鈕,然后添加(創(chuàng)建新數(shù)據(jù)集)。
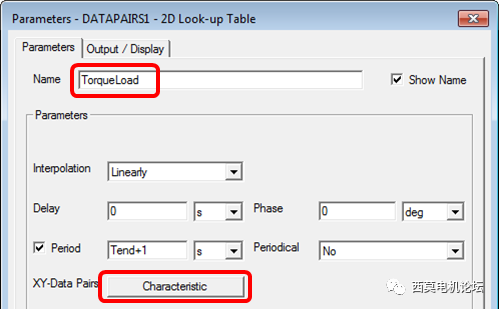
名稱更改為TorqueLoad
單擊Datasets
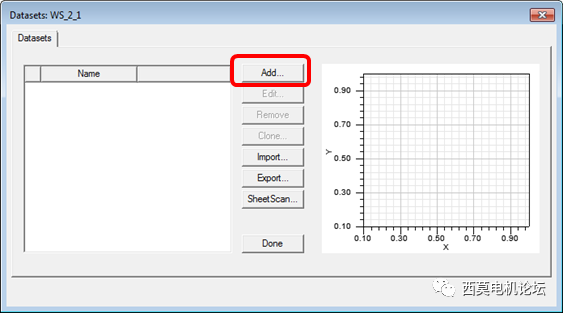
單擊Add
將名稱更改為Tload并根據(jù)以下內(nèi)容輸入時(shí)間/值對:
0 1
0.075 1
0.08 10
0.1 10
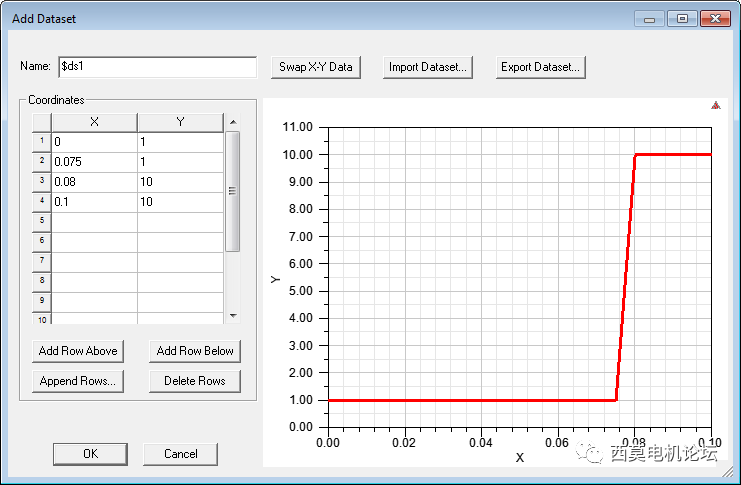
輸入時(shí)間/值對
點(diǎn)擊“確定”,然后“完成”,然后再“確定”,然后,點(diǎn)擊確定退出所有窗口。
接下來向直流電機(jī)添加新的負(fù)載轉(zhuǎn)矩。
再次雙擊TorqueLoad表查找塊,選擇輸出/顯示選項(xiàng)卡,取消選中輸出值VAL的輸出顯示引腳框。雙擊DC Motor組件并將負(fù)載輸入定義為剛剛創(chuàng)建的指定TorqueLoad.VAL的表查找塊的輸出。
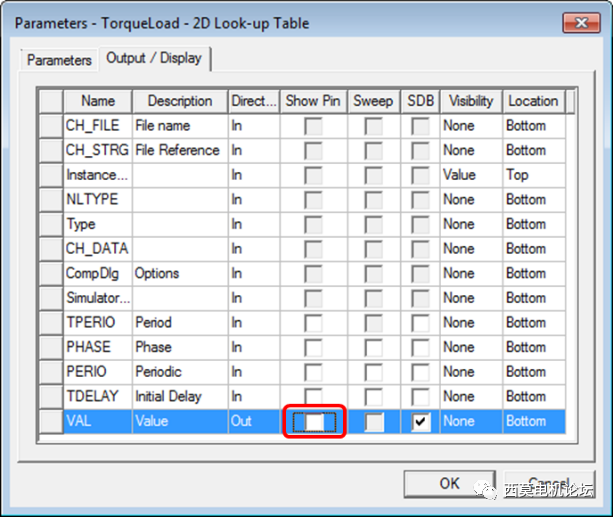
取消選中輸出值VAL的輸出顯示
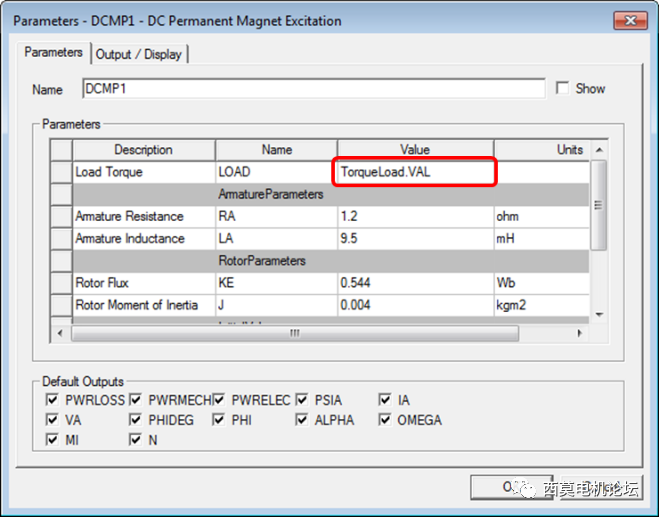
負(fù)載定義為TorqueLoad.VAL
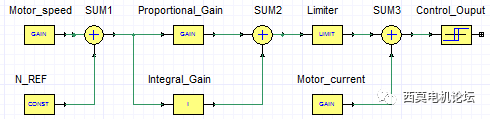
接下來添加控制方案。
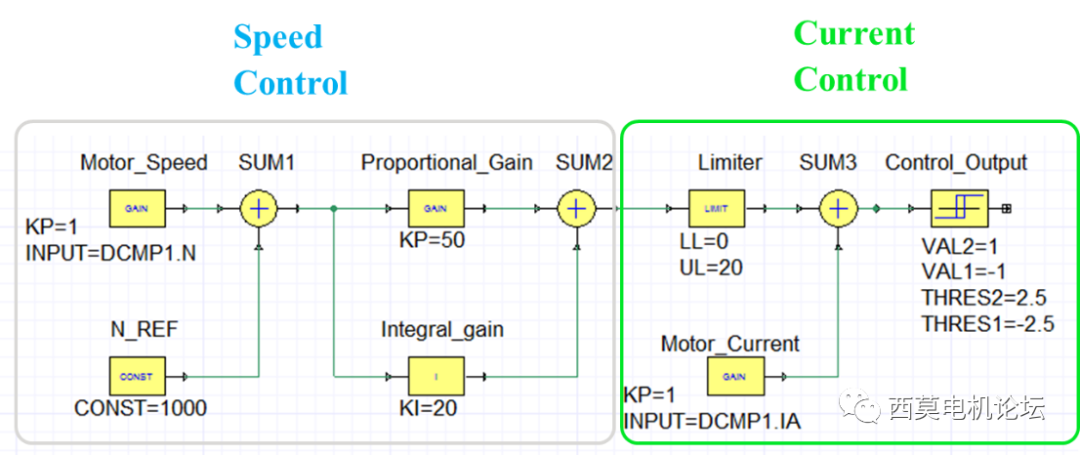
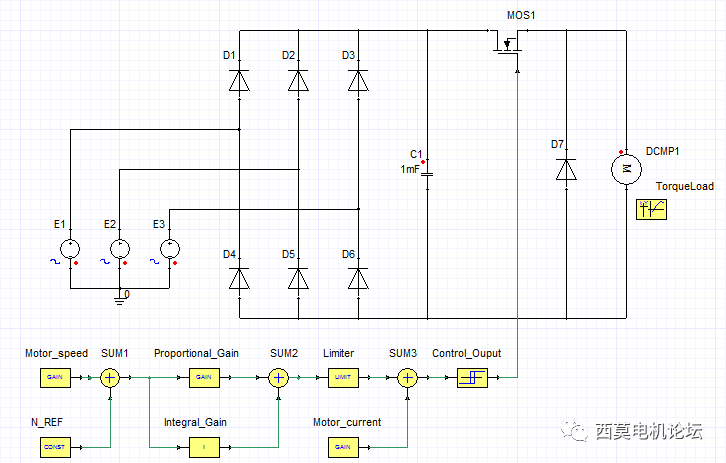
控制方案由外部SpeedControl回路和內(nèi)部Current Control 回路組成。這兩個(gè)控件有不同的目標(biāo),其中速度控制將電機(jī)驅(qū)動(dòng)到1000rpm的固定速度,電流控制使電流不超過最大值,將其限制在20A左右的±2.5A范圍內(nèi),要實(shí)現(xiàn)的完整方案如下圖所示。
外部Speed Control回路和內(nèi)部Current Control回路
接下來插入控制邏輯模塊。
在組件庫窗口中SimplorerElements>>Basic Elements>>Blocks>>Continous Blocks,選擇GAIN塊并將其拖放到Schematic中3次,選擇INTG(積分器)塊并將其拖放到原理圖中。在組件庫窗口中Simplorer Elements>>BasicElements>>Blocks>>Sources Blocks。選擇CONST(常量值)塊并將其拖放到原理圖中,在組件庫窗口中Simplorer Elements>>BasicElements>>Blocks>>Signal Processing Blocks,選擇 SUM塊并將其拖放到Schematic中3次,選擇TPH (Two-Point Element with Hysteresis) 塊并將其拖放到Schematic中,選擇LIMIT(限制器)塊并將其拖放到Schematic中,將10個(gè)塊排列如下圖。
外部Speed Control回路和內(nèi)部Current Control回路所需元器件
接下來設(shè)置組件可見性和屬性。
為了在原理圖上獲得更好的組件可見性,建議檢查高級屬性轉(zhuǎn)到菜單項(xiàng)Tools>>Options>>General Options>>SchematicEditor>>General 最終選中“顯示高級屬性數(shù)據(jù)”。在Tools>>Schematic Editor >>Fonts選擇所需的字體類型和字體大小。 您還可以選中“應(yīng)用此字體...活動(dòng)原理圖”框來修改已放置在原理圖上的元素的可見性。準(zhǔn)備好后,點(diǎn)擊OK。
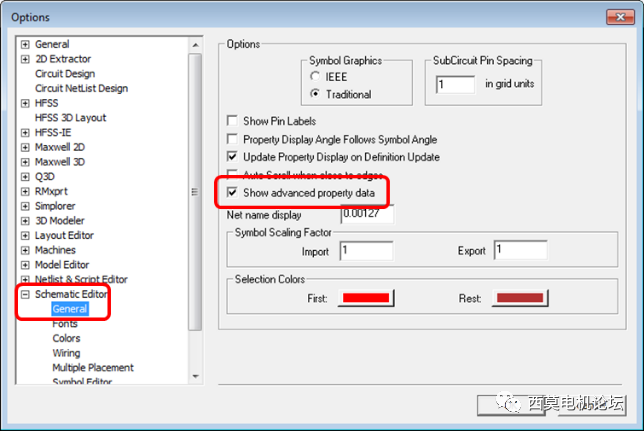
顯示高級屬性數(shù)據(jù)
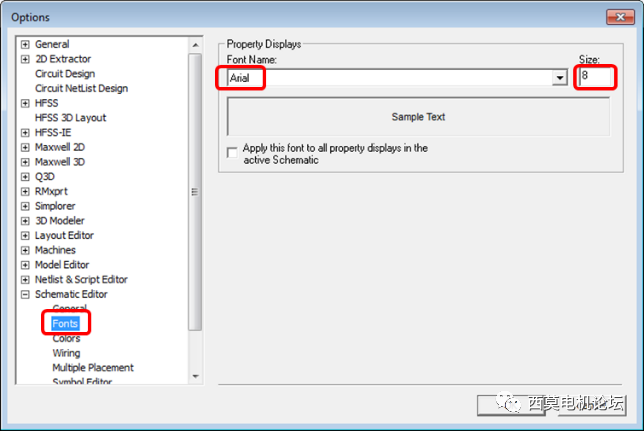
Fonts字體設(shè)置
接下來對齊組件。
為了使模塊方案和一般每個(gè)電路更具可讀性,使用Simplorer提供的對齊功能通常很有幫助,要水平對齊元素/塊,首先選擇要對齊的元素/塊,然后轉(zhuǎn)到菜單項(xiàng) Draw>>Align Horizontal,要垂直對齊元素/塊。先選擇要對齊的元素/塊,然后轉(zhuǎn)到菜單項(xiàng)Draw>>Flip Vertical。
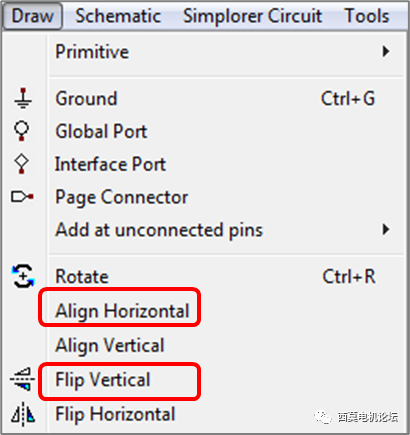
Align Horizontal與Flip Vertical
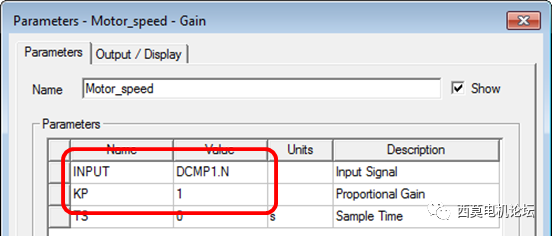
接下來修改增益模塊屬性。
雙擊GAIN1并將名稱更改為Motor_speed,在Output/Display Tab, 不勾選Show Pin 而選INPUT,在參數(shù)選項(xiàng)卡INPUT設(shè)置為DCMP1.N(DC Motor Speed),KP設(shè)置為1,TS為0。
GAIN1(Motor_speed)雙擊GAIN2并將名稱更改為Proportional_Gain,在參數(shù)選項(xiàng)卡KP設(shè)置為50。
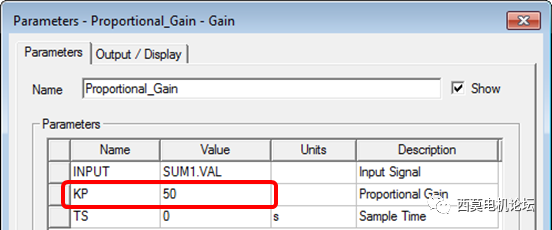
GAIN2(Proportional_Gain)
雙擊GAIN3并將名稱更改為Motor Current,在Output/Display Tab, 不勾選Show Pin而選擇INPUT,在參數(shù)選項(xiàng)卡INPUT設(shè)置DCMP1.IA (DC Motor Current),KP設(shè)置為1,TS設(shè)置為0。
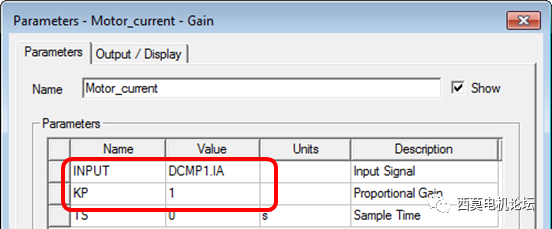
GAIN3(Motor_current)
接下來修改求和模塊屬性。
按Ctrl鍵選擇SUM1、SUM2和SUM3,執(zhí)行RMB>>Flip Vertical,雙擊SUM1并將INPUT[0]的符號設(shè)置為“-”,保持SUM2不變,雙擊SUM3并將INPUT[1]的符號設(shè)置為to “-”。
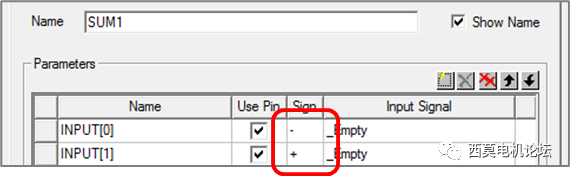
SUM1
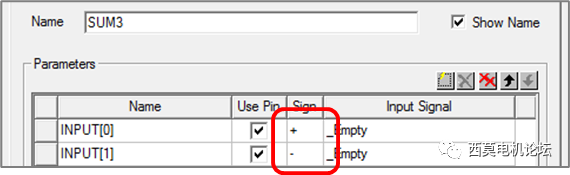
SUM3
接下來修改常量模塊屬性。
雙擊CONST1并將名稱更改為N_REF,將值給定為1000。
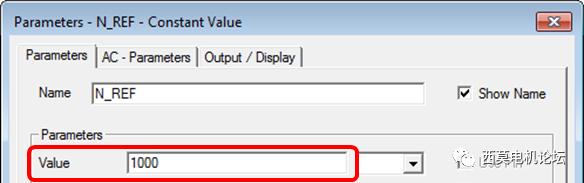
常量模塊
接下來修改INTG積分模塊屬性。
雙擊INTG1并將名稱更改為Integral_Gain,在參數(shù)選項(xiàng)卡中將KI給定為20。
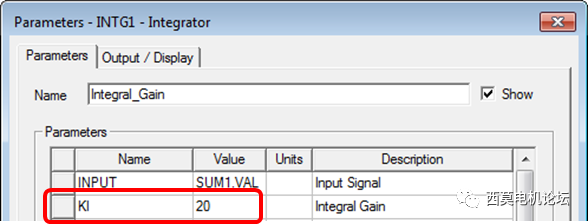
INTG積分模塊
接下來修改限制模塊屬性。
雙擊LIMIT1并將名稱更改為Limiter,在參數(shù)選項(xiàng)卡中,將UL給定為20,將LL給定為0。
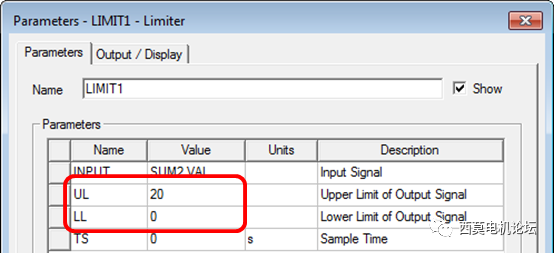
限制模塊
接下來修改TPHBlock (Schmitt Trigger) 模塊屬性。
雙擊TPH并將名稱更改為Control_Output,在參數(shù)選項(xiàng)卡中,將THRES1給定為-2.5,將THRES2給定為2.5,將VAL1給定為-1,將VAL2給定為1。
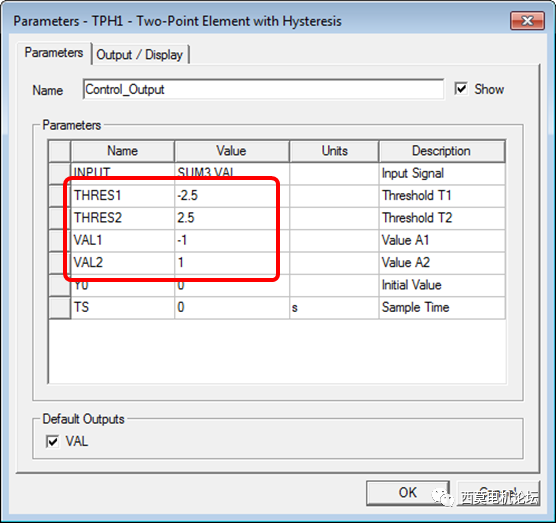
TPH Block(Schmitt Trigger)模塊
接下來連接模塊和控制方案。
按下入進(jìn)行10個(gè)模塊的連接。
連接10個(gè)模塊
將Control_Output模塊連接到Mosfet的門級。
Control_Output模塊連接到Mosfet的門級
接下來進(jìn)行后處理準(zhǔn)備。
選擇菜單Draw>>Report>>RectangularPlot,并將繪圖放置在原理圖中,如放在電路上方,此時(shí)會(huì)自動(dòng)彈出New Trace窗口,用戶可通過選擇數(shù)量來選擇流經(jīng)DCMP電機(jī)的電流 DCMP1.IA,單擊“Add Trace”按鈕,然后單擊“Close”關(guān)閉。
Rectangular Plot放置在電路上方
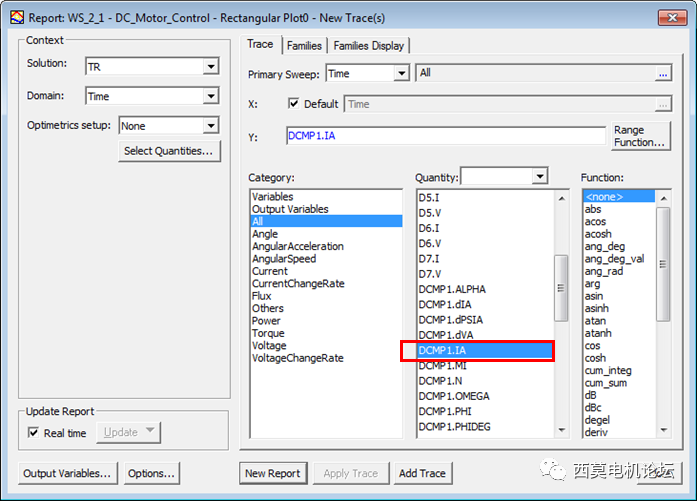
選擇DCMP電機(jī)的電流 DCMP1.IA
接下來設(shè)置模擬分析。
在本示例中,由于使用的控制技術(shù),無法輕松預(yù)測 Mosfet 開關(guān)頻率,為了確保以適當(dāng)?shù)姆绞奖硎舅锌赡艿乃矐B(tài),在這種情況下,我們?yōu)镠min和Hmax設(shè)置了非常小的值。在瞬態(tài)分析設(shè)置窗口中,給定Tend為120ms,給定Hmin為1ns,給定Hmax為1ms,點(diǎn)擊OK鍵確認(rèn)。
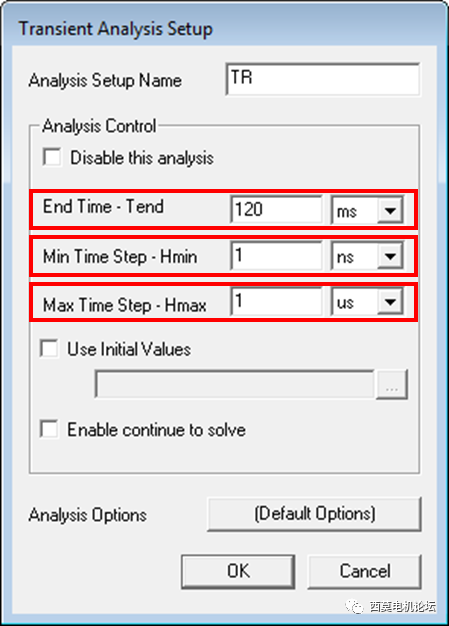
瞬態(tài)分析求解設(shè)置
最后進(jìn)行分析與結(jié)果的查看。
選擇菜單SimplorerCircuit>>Analyze運(yùn)行分析,流經(jīng)直流電機(jī)的電流的最終結(jié)果應(yīng)與下圖非常相似。
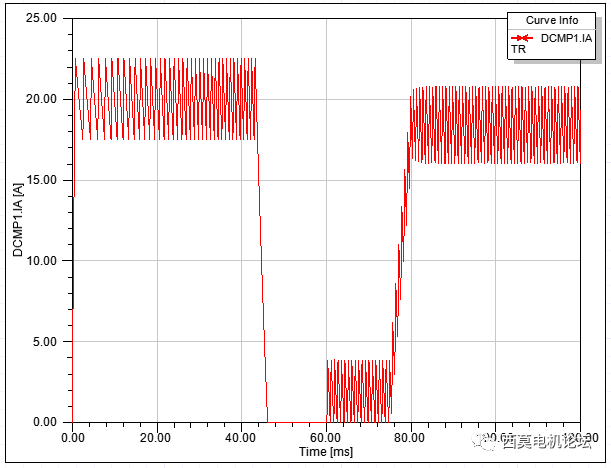
電流結(jié)果
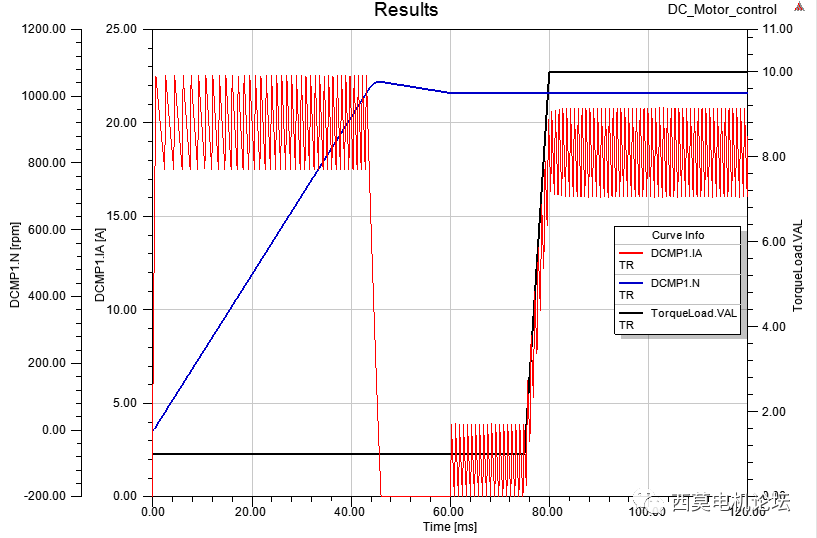
選擇圖表報(bào)告RMB>>ModifyReport,選擇參數(shù)DCMP1.N與TorqueLoad.VAL同時(shí)按下Add Trace,得到如下結(jié)果。
電流、轉(zhuǎn)速、轉(zhuǎn)矩結(jié)果
用戶需要注意的是,當(dāng)電機(jī)加速到所需速度時(shí),電機(jī)電流將受到限制,一旦電機(jī)達(dá)到所需速度,電機(jī)電流就會(huì)降低以保持速度,當(dāng)轉(zhuǎn)矩負(fù)載再次增加時(shí),它會(huì)導(dǎo)致電機(jī)電流增加以支持增加的轉(zhuǎn)矩負(fù)載,以保持速度恒定。
此Workshop到此結(jié)束,最后,在工作文件夾中保存名為WS_2_1 的文件。
3 總結(jié)
本文以永磁直流電機(jī)為例,介紹了基于Simplorer的電機(jī)控制模型。我們建立了一個(gè)簡單的 AC/DC 二極管整流器,為直流永磁電機(jī)供電,同時(shí)還構(gòu)建了一個(gè)完整的控制方案,用于在啟動(dòng)和突然負(fù)載變化的情況下驅(qū)動(dòng)電機(jī),來對永磁直流電機(jī)進(jìn)行控制。Simplorer強(qiáng)大的虛擬仿真技術(shù),可幫助用戶深入研究產(chǎn)品設(shè)計(jì)的每個(gè)方面,是電機(jī)及驅(qū)動(dòng)系統(tǒng)、以及新能源系統(tǒng)理想的設(shè)計(jì)工具,能在快速實(shí)現(xiàn)高精度設(shè)計(jì)的同時(shí),降低設(shè)計(jì)成本。
審核編輯:湯梓紅
-
二極管
+關(guān)注
關(guān)注
149文章
10408瀏覽量
178441 -
整流器
+關(guān)注
關(guān)注
28文章
1660瀏覽量
95724 -
電機(jī)控制
+關(guān)注
關(guān)注
3600文章
2131瀏覽量
277753 -
ANSYSSimplorer
+關(guān)注
關(guān)注
2文章
2瀏覽量
8027 -
永磁直流電機(jī)
+關(guān)注
關(guān)注
1文章
21瀏覽量
7191
原文標(biāo)題:基于Simplorer的永磁直流電機(jī)控制
文章出處:【微信號:西莫電機(jī)論壇,微信公眾號:西莫電機(jī)論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
永磁直流電機(jī)實(shí)用設(shè)計(jì)及應(yīng)用技術(shù)
永磁無刷直流電機(jī)與永磁同步電機(jī)有哪些不同點(diǎn)啊
直流電機(jī)
永磁直流電機(jī)的原理和設(shè)計(jì)與定制
永磁直流電機(jī)的原理

永磁無刷直流電機(jī)的優(yōu)缺點(diǎn)

淺析Simplorer的永磁直流電機(jī)控制(上)

淺析Simplorer的永磁直流電機(jī)控制(中)
淺析Simplorer的永磁直流電機(jī)控制(下)
無刷直流電機(jī)、永磁同步電機(jī)及FOC控制算法簡介



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論