") 基于OFDR重構(gòu)框架分布式形狀傳感誤差模型研究
基于OFDR重構(gòu)框架分布式形狀傳感誤差模型研究

01導(dǎo)讀
目前光纖形狀傳感重構(gòu)誤差通常表示為歐幾里得距離。然而,形狀重構(gòu)的歐幾里得距離誤差取決于待重構(gòu)形狀的復(fù)雜度,而形狀復(fù)雜度取決于長度、曲率和撓率。
天津大學(xué)丁振揚(yáng)副教授團(tuán)隊(duì)基于Frenet-Serret框架和誤差傳遞理論,建立了光頻域反射(OFDR)中分布式形狀傳感的重構(gòu)誤差模型,闡明了重構(gòu)誤差與曲率、撓率、光纖長度和應(yīng)變測(cè)量誤差等參數(shù)之間的關(guān)系。
通過基于OFDR的分布式光纖形狀傳感系統(tǒng)實(shí)驗(yàn)驗(yàn)證了所提出的重構(gòu)誤差模型的可行性和適用性。
當(dāng)需要重構(gòu)形狀的曲率、撓率、光纖長度的估計(jì)范圍以及OFDR系統(tǒng)的應(yīng)變測(cè)量誤差已知時(shí),所提出的重構(gòu)誤差模型可預(yù)測(cè)最大重構(gòu)誤差,進(jìn)而判斷形狀重構(gòu)誤差是否滿足要求實(shí)際應(yīng)用的需求。
封面圖形狀重構(gòu)誤差傳遞模型 圖源:Optics Express
02研究背景
近年來,光纖形狀傳感已成為光纖傳感領(lǐng)域的一個(gè)熱門研究方向。與其他形狀重構(gòu)技術(shù)相比,光纖形狀傳感具有一系列優(yōu)點(diǎn),如結(jié)構(gòu)緊湊、靈活性高、耐惡劣環(huán)境和腐蝕,并且能夠?qū)崿F(xiàn)分布式傳感。光纖形狀傳感在醫(yī)療器械、機(jī)器人、航空航天等領(lǐng)域具有巨大的應(yīng)用潛力。 目前光纖形狀傳感重構(gòu)誤差通常表示為歐幾里得距離。
光纖形狀傳感重構(gòu)誤差模型研究相對(duì)有限。盡管已有研究者對(duì)光纖形狀傳感精度進(jìn)行了研究,但只給出單一數(shù)值,而形狀傳感精度與形狀參數(shù)(如曲率、撓率、長度和應(yīng)變測(cè)量誤差)是直接相關(guān)的,單一精度值并不能反映其在任意形狀下情況。而目前歐幾里得距離誤差與形狀參數(shù)之間的模型尚未進(jìn)行研究。
如果建立了重構(gòu)誤差模型,則可以基于應(yīng)變測(cè)量誤差和形狀參數(shù)來估計(jì)任意形狀的重構(gòu)誤差,這對(duì)于根據(jù)形狀軌跡確定形狀重構(gòu)誤差是否符合實(shí)際應(yīng)用要求非常有用。
03創(chuàng)新研究
3.1 形狀重構(gòu)誤差模型
分布式應(yīng)變測(cè)量是形狀測(cè)量的基礎(chǔ)和前提。顯然,更好的空間分辨率和更高的應(yīng)變測(cè)量精度將導(dǎo)致更精確的形狀重構(gòu)。事實(shí)上,光纖形狀傳感中OFDR的感測(cè)空間分辨率通常基于OFDR系統(tǒng)的信噪比(SNR)設(shè)置為最小值,并且在這種情況下,空間分辨率對(duì)重構(gòu)誤差的影響可以忽略不計(jì)。
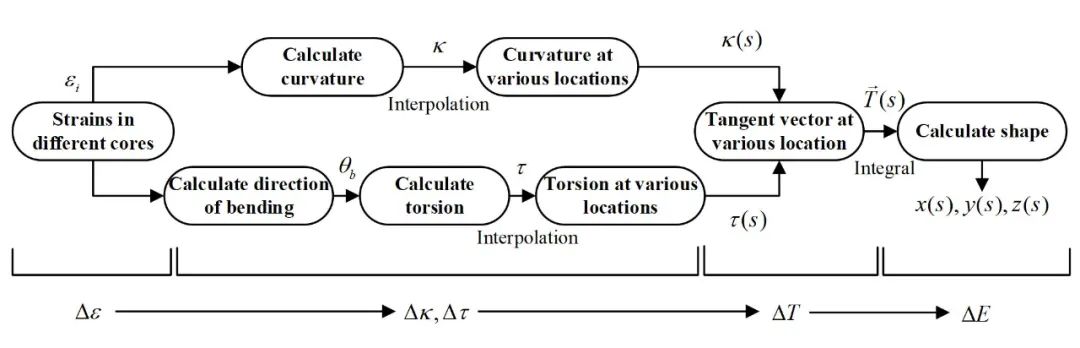
因此,建立形狀重構(gòu)誤差與應(yīng)變測(cè)量誤差之間的三維形狀傳感誤差模型具有重要意義。 本文中使用微分幾何形狀重構(gòu)算法是基于廣泛使用的Frenet-Serret框架,通過求解Frenet公式中切向量、法向量和副法向量來獲得曲線的空間坐標(biāo)。基于Franet-Serret框架的形狀重構(gòu)算法的誤差傳播過程如下:應(yīng)變測(cè)量誤差Δε導(dǎo)致曲率誤差Δκ和撓率誤差Δτ,這進(jìn)一步導(dǎo)致切線向量ΔT的計(jì)算偏差。
ΔT在形狀長度s積分過程中不斷累積,最終導(dǎo)致歐幾里得距離重構(gòu)誤差ΔE。 通過構(gòu)建曲率誤差、撓率誤差與應(yīng)變誤差關(guān)系,得到了任意空間曲線下距離重構(gòu)誤差ΔE模型: ?
?
3.2 已定應(yīng)變誤差下的重構(gòu)誤差模型驗(yàn)證
為了驗(yàn)證重構(gòu)誤差模型的有效性,我們進(jìn)行了基于OFDR的多芯光纖形狀傳感實(shí)驗(yàn)。我們把實(shí)驗(yàn)分成兩部分。在第一部分,我們通過變量控制方法驗(yàn)證了重構(gòu)誤差與模型參數(shù)之間的關(guān)系。在第二部分,我們通過校準(zhǔn)OFDR系統(tǒng)的最大應(yīng)變誤差來驗(yàn)證該模型對(duì)隨機(jī)應(yīng)變誤差的相同適用性。
為了消除空間分辨率對(duì)實(shí)驗(yàn)的影響,基于OFDR系統(tǒng)的SNR,將所有實(shí)驗(yàn)的空間分辨率設(shè)置為最小3.6mm。如何選擇合理的形狀來驗(yàn)證模型是一個(gè)關(guān)鍵點(diǎn)。形狀的復(fù)雜性無法定量定義。任何復(fù)雜的形狀都可以看作是由具有常數(shù)曲率κ和撓率τ的弧微段組成。
如果我們已經(jīng)驗(yàn)證了該模型對(duì)于具有恒定曲率和撓率的形狀是正確的,則該模型對(duì)于任何復(fù)雜形狀都是正確的。原因是復(fù)雜的形狀是許多簡(jiǎn)單形狀的一個(gè)整體過程。為了將曲線的κ和τ控制在一個(gè)恒定值,我們結(jié)合3D打印技術(shù)設(shè)計(jì)并打印了一系列包含凹槽的模型,其中已知κ和τ曲線作為實(shí)驗(yàn)中多芯光纖的形狀載體。
此外,我們選擇較短的光纖進(jìn)行實(shí)驗(yàn),以使曲線的κ和τ的波動(dòng)盡可能小。
首先驗(yàn)證了撓率誤差與重構(gòu)誤差關(guān)系,設(shè)計(jì)并制作了曲率為0.1m,撓率為0 rad/m, 2 rad/m, 4 rad/m, 6 rad/m, 8 rad/m 和 10 rad/m的3D打印模型如圖2所示。
實(shí)驗(yàn)中多芯光纖纏繞在3D打印模型的凹槽里,形狀重構(gòu)中加入5 με已定應(yīng)變誤差,相關(guān)實(shí)驗(yàn)結(jié)果如圖3(a)所示。
根據(jù)模型計(jì)算的重構(gòu)誤差ΔE和實(shí)際測(cè)量的ΔE如圖3(b)所示。理論預(yù)測(cè)重構(gòu)誤差與實(shí)驗(yàn)結(jié)果相符。重構(gòu)誤差隨著撓率增加而減小。
撓率較小時(shí),重構(gòu)誤差基本不隨撓率變化。當(dāng)撓率較大時(shí),重構(gòu)誤差受撓率影響較大。
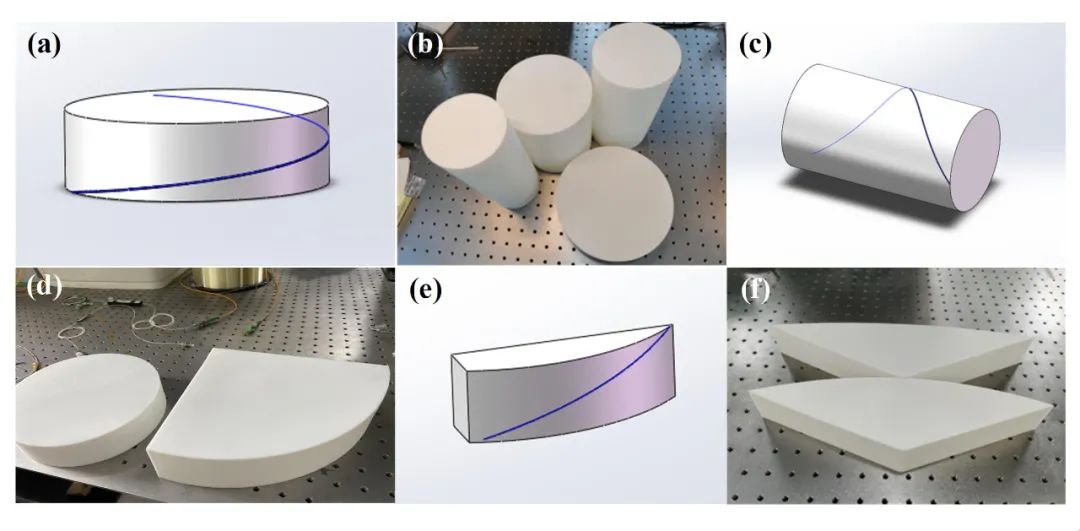
圖23D打印空間曲線模型 圖源:Optics Express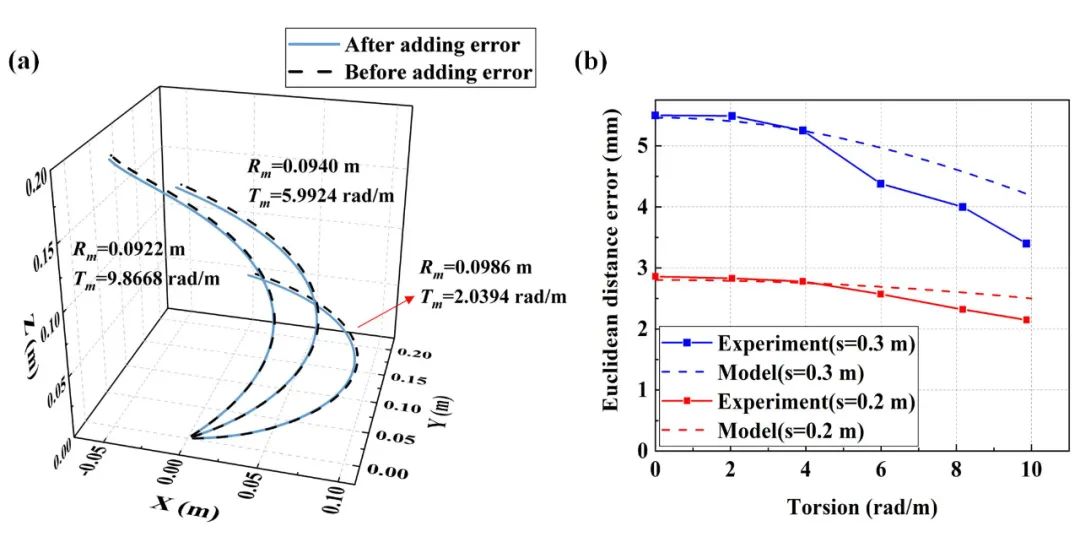
圖3撓率驗(yàn)證結(jié)果(a)重構(gòu)曲線(b)理論和實(shí)驗(yàn)重構(gòu)誤差對(duì)比
其次,驗(yàn)證了曲率誤差與重構(gòu)誤差關(guān)系。根據(jù)誤差模型和圖3(b)顯示關(guān)系,撓率為0時(shí),重構(gòu)誤差最大。這里采用二維曲線對(duì)重構(gòu)誤差與曲率關(guān)系驗(yàn)證,采用曲率半徑為0.05m,0.1m,0.2m, 0.35m, 0.5m和1m的3D打印模型如圖2所示。形狀重構(gòu)中加入5με已定應(yīng)變誤差。
二維曲線重構(gòu)結(jié)果如圖4(a)所示。同時(shí)根據(jù)誤差模型計(jì)算了形狀長度為0.2m和0.3m下不同曲率半徑下的重構(gòu)誤差并與測(cè)量值進(jìn)行比較如圖4(b)所示。理論預(yù)測(cè)重構(gòu)誤差與實(shí)驗(yàn)結(jié)果相符。從圖4(b)可以看出,但曲率半徑較小時(shí),重構(gòu)誤差隨曲率半徑增大迅速增加。當(dāng)曲率半徑較大時(shí),重構(gòu)誤差隨曲率半徑增大趨于穩(wěn)定。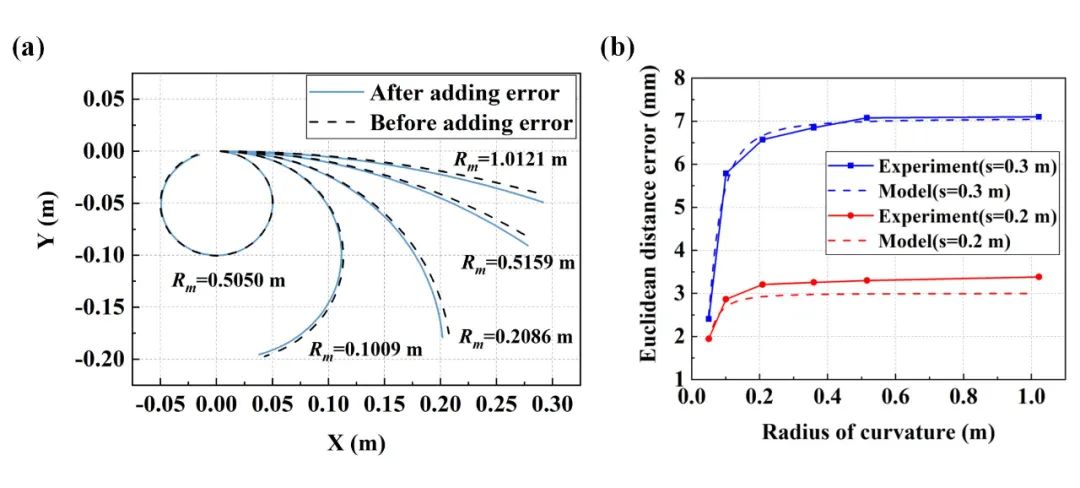
圖4 曲率驗(yàn)證結(jié)果(a)重構(gòu)曲線(b)理論和實(shí)驗(yàn)重構(gòu)誤差對(duì)比
再次,驗(yàn)證了光纖長度與重構(gòu)誤差關(guān)系。為了驗(yàn)證這一關(guān)系,我們重構(gòu)了一個(gè)螺旋線形狀,其長度為0.55m,曲率半徑為0.052m,撓率為3.8rad/m。形狀重構(gòu)中加入5 με已定應(yīng)變誤差。
螺旋線重構(gòu)結(jié)果如圖5(a)所示。不同光纖長度下的重構(gòu)誤差并與測(cè)量值進(jìn)行比較如圖5(b)所示。理論預(yù)測(cè)重構(gòu)誤差與實(shí)驗(yàn)結(jié)果呈現(xiàn)高度一致性。重構(gòu)誤差與光纖長度呈現(xiàn)非線性增加,其原因是光纖重構(gòu)過程中誤差累積的結(jié)果。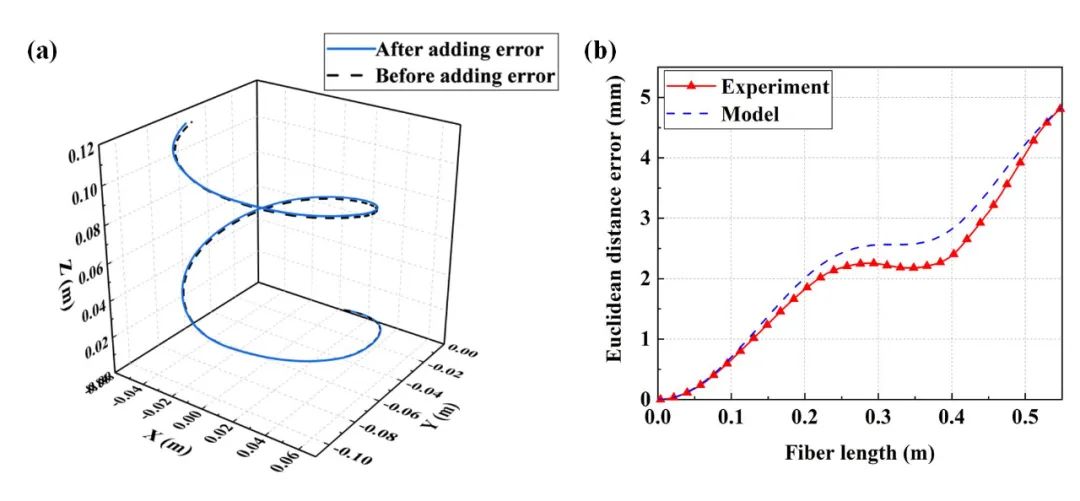
圖5 光纖長度與重構(gòu)誤差驗(yàn)證結(jié)果(a)重構(gòu)曲線(b)理論和實(shí)驗(yàn)重構(gòu)誤差對(duì)比
最后,驗(yàn)證重構(gòu)誤差與應(yīng)變測(cè)量誤差關(guān)系。采用0.3 m長曲率半徑為1m的弧形作為驗(yàn)證模型。沿光纖長度上分別加入已定應(yīng)變誤差f1 με, 2 με, 3 με, 4 με和5 με。
不同應(yīng)變誤差下的測(cè)量和理論的重構(gòu)誤差如圖6所示。理論預(yù)測(cè)重構(gòu)誤差與實(shí)驗(yàn)結(jié)果呈現(xiàn)高度一致性。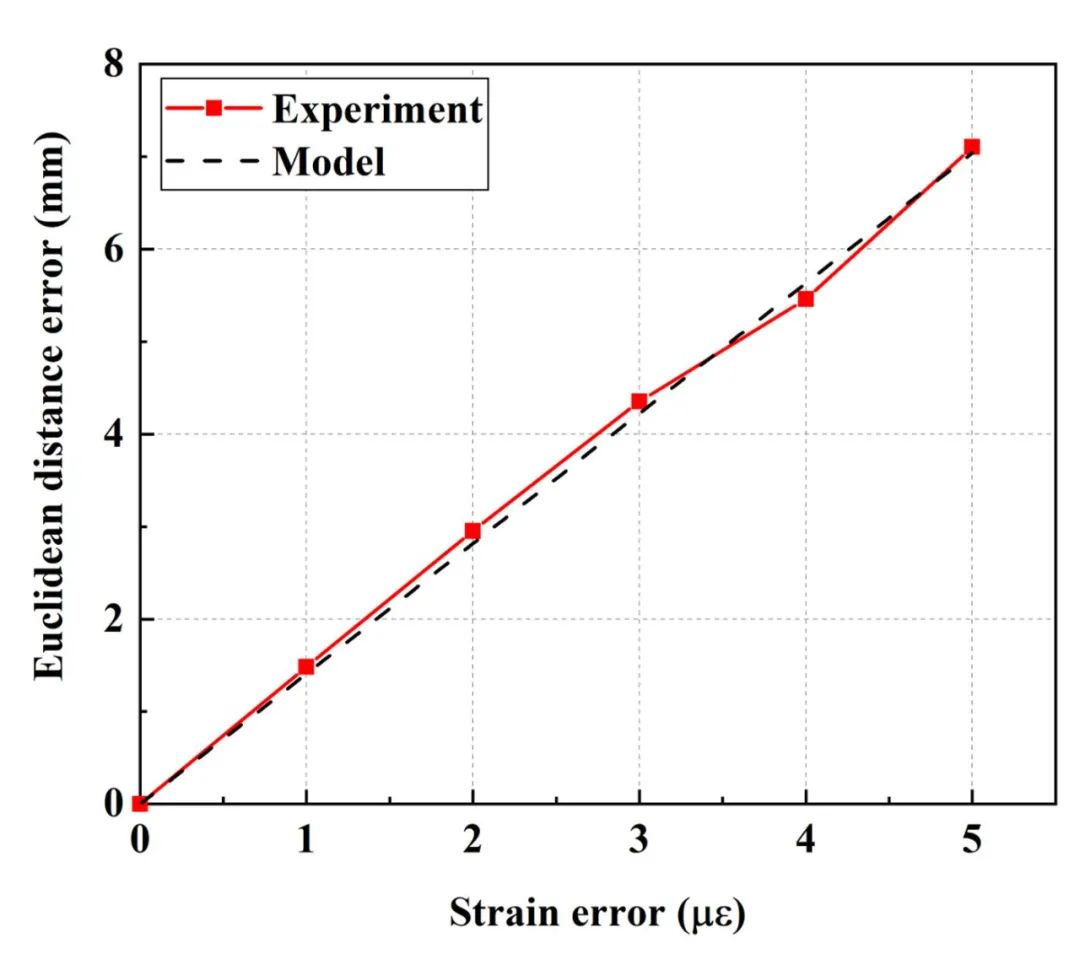
圖6 不同應(yīng)變誤差下重構(gòu)誤差驗(yàn)證結(jié)果 圖源:Optics Express
3.3 隨機(jī)應(yīng)變誤差下的重構(gòu)誤差模型驗(yàn)證
之前已經(jīng)證明了已定應(yīng)變誤差下誤差模型的可行性,但在實(shí)際應(yīng)用中,OFDR沿光纖應(yīng)變誤差是隨機(jī)的,而在OFDR應(yīng)變傳感系統(tǒng)中會(huì)給出最大應(yīng)變誤差Δεmax。本節(jié)中,我們將通過校準(zhǔn)實(shí)驗(yàn)中OFDR系統(tǒng)的Δεmax,進(jìn)一步驗(yàn)證重構(gòu)誤差模型對(duì)隨機(jī)應(yīng)變測(cè)量誤差的適用性。
如何構(gòu)建不同Δεmax是實(shí)驗(yàn)關(guān)鍵,我們這里采用設(shè)置不同應(yīng)變測(cè)量分辨率通過與納米位移臺(tái)應(yīng)變標(biāo)定值比對(duì),得到不同的Δεmax。應(yīng)變校準(zhǔn)范圍為0至25με,每5με進(jìn)行一次校準(zhǔn)。每個(gè)應(yīng)變?nèi)?0個(gè)應(yīng)變測(cè)量點(diǎn),并計(jì)算Δεmax。我們進(jìn)行了形狀重構(gòu)實(shí)驗(yàn),以驗(yàn)證在不同Δεmax下重構(gòu)誤差模型的適用性,其中測(cè)試形狀為曲率半徑為1m的二維圓弧。
在Δεmax分別為6.19με、6.22με、8.41με和10.04με的條件下進(jìn)行形狀重構(gòu),并通過將重構(gòu)曲線與標(biāo)準(zhǔn)曲線進(jìn)行比較來計(jì)算測(cè)量重構(gòu)誤差。顯示了測(cè)量重構(gòu)和光纖長度之間的關(guān)系,并與基于重構(gòu)誤差模型的理論值進(jìn)行了比較,如圖7所示。
應(yīng)該注意的是,圖7中觀察到的理論值和實(shí)測(cè)值之間的差異相對(duì)較大。然而,多次實(shí)驗(yàn)的測(cè)量值沒有超過重構(gòu)誤差模型計(jì)算的理論最大值。
由于OFDR系統(tǒng)的應(yīng)變測(cè)量精度可以預(yù)先評(píng)估,因此根據(jù)Δεmax利用誤差模型得到重構(gòu)誤差可以指導(dǎo)我們?cè)诠饫w形狀傳感的設(shè)計(jì)中選擇合適的OFDR系統(tǒng)應(yīng)變測(cè)量精度,并預(yù)測(cè)形狀重構(gòu)精度。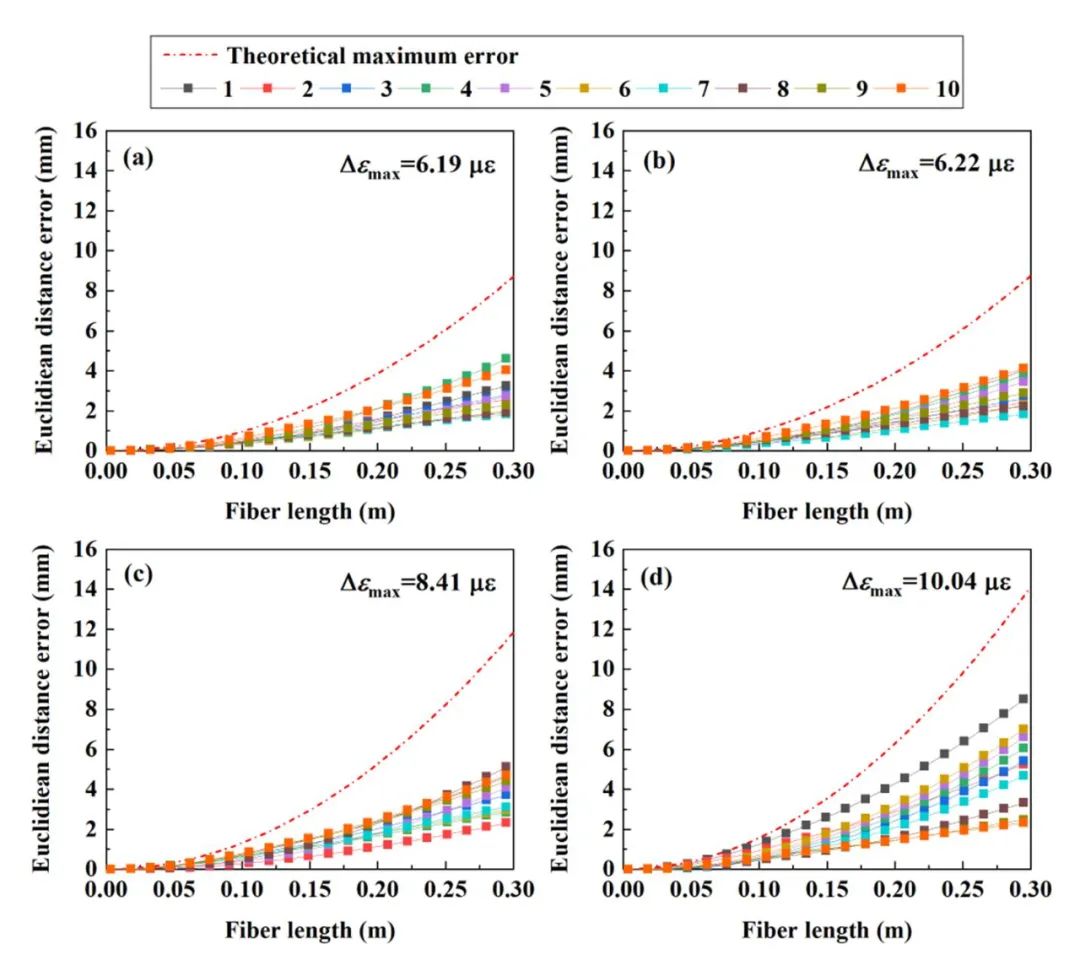
圖7 不同最大應(yīng)變誤差下重構(gòu)誤差驗(yàn)證結(jié)果。(a) Δεmax=6.19 με. (b) Δεmax=6.22 με. (c) Δεmax=8.41 με. (d) Δεmax=10.04 με.
04應(yīng)用與展望
三維形狀傳感誤差模型的建立不僅讓我們更清楚地了解了影響形狀重構(gòu)結(jié)果的因素,還為光纖形狀傳感系統(tǒng)在不同應(yīng)用場(chǎng)景下的設(shè)計(jì)和性能評(píng)估提供了理論指導(dǎo)。
當(dāng)形狀測(cè)量精度要求以及待重構(gòu)形狀的曲率和撓率范圍已明確時(shí),所提出的重構(gòu)誤差模型可用于計(jì)算滿足要求的最小應(yīng)變測(cè)量誤差。
因此,該誤差模型可以有效地指導(dǎo)設(shè)計(jì)者為形狀傳感器的選擇合適的應(yīng)變測(cè)量系統(tǒng)。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2576文章
55041瀏覽量
791326 -
SNR
+關(guān)注
關(guān)注
3文章
198瀏覽量
25659 -
3D打印技術(shù)
+關(guān)注
關(guān)注
4文章
223瀏覽量
33529
原文標(biāo)題:Optics Express:基于OFDR重構(gòu)框架分布式形狀傳感誤差模型研究
文章出處:【微信號(hào):光纖傳感Focus,微信公眾號(hào):光纖傳感Focus】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
昊衡科技 多芯光纖三維形狀傳感系統(tǒng),精準(zhǔn)感知!

七大大模型賦能的無人集群分布式協(xié)同調(diào)度與任務(wù)分配系統(tǒng)
大模型ai賦能的無人集群分布式協(xié)同調(diào)度與任務(wù)分配系統(tǒng)
OFDR技術(shù)與三維重構(gòu)的協(xié)同價(jià)值

如何解決分布式光伏計(jì)量難題?
【節(jié)能學(xué)院】Acrel-1000DP分布式光伏監(jiān)控系統(tǒng)在奉賢平高食品 4.4MW 分布式光伏中應(yīng)用

分布式光伏發(fā)電監(jiān)測(cè)系統(tǒng)技術(shù)方案

雙電機(jī)分布式驅(qū)動(dòng)汽車高速穩(wěn)定性機(jī)電耦合控制
潤和軟件StackRUNS異構(gòu)分布式推理框架的應(yīng)用案例

潤和軟件發(fā)布StackRUNS異構(gòu)分布式推理框架

曙光存儲(chǔ)領(lǐng)跑中國分布式存儲(chǔ)市場(chǎng)
分布式光纖傳感的用途
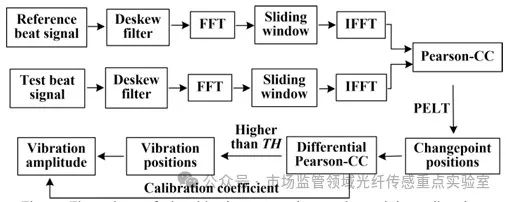
基于使用皮爾遜相關(guān)系數(shù)的光頻域反射技術(shù)(OFDR)的單端大于100公里的分布式振動(dòng)傳感器
淺談工商企業(yè)用電管理的分布式儲(chǔ)能設(shè)計(jì)
淺談分布式光伏系統(tǒng)在工業(yè)企業(yè)的設(shè)計(jì)及應(yīng)用



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論