 KUKA機器人測量固定工具
KUKA機器人測量固定工具

測量固定工具-又叫外部工具
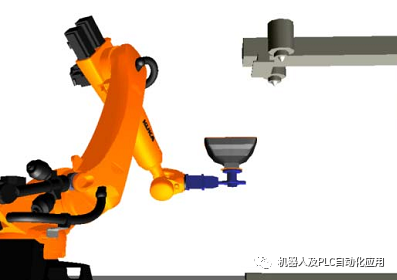
需要注意,在用固定工具手動移動時,運動均相對外部 TCP!

將 IpoMode (Ipo 模式)選擇設為外部工具,這樣才能根據外部工具坐標進行手動移動。
控制器通過在手動移動選項選項窗口中選擇外部工具來切換:所有運動現在均相對外部 TCP,而不是由機器人導引的工具。
固定工具的測量分為 2 步:
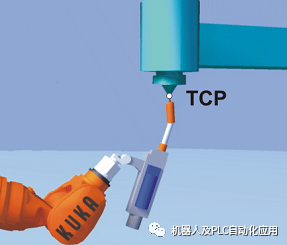
1. 測量固定工具的 TCP
固定工具的 TCP 被稱為外部 TCP。
2 測量工件
可選擇以下方法:? 直接法?, 間接法.
測量外部 TCP
首先,將固定工具的 TCP 告知機器人控制系統。為此用一個已經測量過的工具移至 TCP。
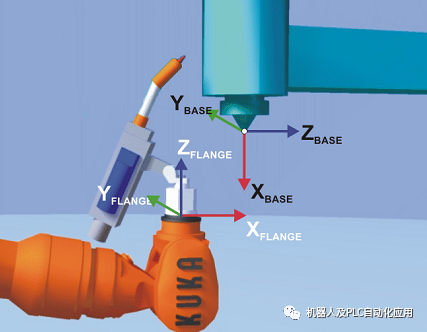
之后,將固定工具的坐標系取向告知機器人控制系統。為此用戶對一個已經測量過的工具坐標系平行于新的坐標系進行校準。有兩種方式:
l? 5D法: 用戶將工具的碰撞方向 告知機器人控制系統。 該碰撞方向默認為 X 軸。其他軸的取向將由系統確定,用戶對此沒有影響力。系統總是為其它軸確定相同的取向。如果之后必須對工具重新進行測量,比如在發生碰撞后,僅需要重新確定碰撞方向。而無需考慮碰撞方向的轉度。
l? 6D法: 用戶將所有三個軸的取向告知機器人控制系統。
操作步驟
1. 在主菜單中選擇投入運行 > 測量 > 固定工具 > 工具。
2. 為固定工具指定一個號碼和一個名稱。用 繼續鍵確認。
3. 輸入已經測量過的工具編號。用 繼續鍵確認。
4. 在 5D/6D 欄中選擇一種規格。用繼續鍵確認。
5. 用已測量工具的 TCP 移至固定工具的 TCP。點擊測量。點擊 是回答安全詢問。
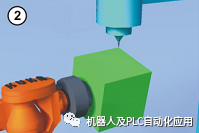
6. 如果選擇了 5D:
將 +X基坐標系平行對準 -Z法蘭坐標系。
(也就是將連接法蘭調整成與固定工具的作業方向垂直。)
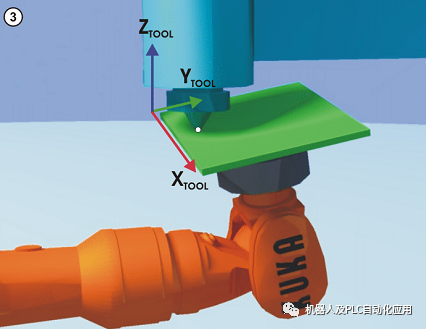
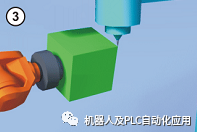
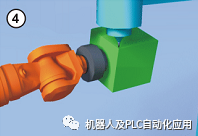
如果選擇了6D:
應對連接法蘭進行調整,使得它的軸平行于固定工具的軸:
? +X基坐標系平行于 -Z法蘭坐標系
(也就是將連接法蘭調整成與工具的作業方向垂直。)
? +Y基坐標系平行于 +Y法蘭坐標系
? +Z基坐標系平行于 +X法蘭坐標系
7. 點擊 測量。點擊是回答安全詢問。
8. 在需要時,可以讓測量點的坐標和姿態以增量和角度顯示 (以法蘭坐標系為基準)。為此按下測量點。然后通過退回返回到上一個視圖。
9. 按下 保存。
測量工件:直接法
將機器人的原點和工件的另外 2 個點通知機器人控制系統。此 3 個點將該工件清楚地定義出來。
1. 在主菜單中選擇投入運行 > 測量 > 固定工具 > 工件 > 直接測量。
2. 為工件分配一個編號和一個名稱。用 繼續鍵確認。
3. 輸入固定工具的編號。用 繼續鍵確認。
4. 將工件坐標系的原點移至固定工具的 TCP 上。點擊測量。點擊 是回答安全詢問。
5. 將在工件坐標系的正向 X 軸上的一點移至固定工具的 TCP 上。點擊測量。點擊是回答安全詢問。
6. 將一個位于工件坐標系的 XY 平面上、且 Y 值為正的點移至固定工具的 TCP 上。點擊測量。點擊是回答安全詢問。


7. 輸入工件的負載數據。(如果要單獨輸入負荷數據,則可以跳過該步驟。)
8. 用 繼續鍵確認。
9. 在需要時,可以讓測量點的坐標和姿態以增量和角度顯示 (以法蘭坐標系
為基準)。為此按下測量點。然后通過退回返回到上一個視圖。
10. 按下 保存。
測量工件:間接法
機器人控制系統在 4 個點 (其坐標必須已知)的基礎上計算工件。將不用移至工件原點。
1. 在主菜單中選擇投入運行 > 測量 > 固定工具 > 工件 > 間接測量。
2. 為工件分配一個編號和一個名稱。用 繼續鍵確認。
3. 輸入固定工具的編號。用 繼續鍵確認。
4. 輸入工件的一個已知點的坐標,用此點移至固定工具的 TCP。點擊 測量。點擊是回答安全詢問。

5. 把第4步重復三次。
6. 輸入工件的負荷數據。(如果要單獨輸入負荷數據,則可以跳過該步驟。)
7. 用 繼續鍵確認。
8. 在需要時,可以讓測量點的坐標和姿態以增量和角度顯示 (以法蘭坐標系為基準)。為此按下測量點。然后通過退回返回到上一個視圖。
9. 按下 保存。
審核編輯 :李倩
-
機器人
+關注
關注
213文章
31079瀏覽量
222255 -
KUKA
+關注
關注
3文章
218瀏覽量
17474
原文標題:KUKA機器人 測量固定工具
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
EtherCAT轉PROFINET網關:助力KUKA機器人實現“焊”裝自由!
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
什么是機器人?追溯機器人技術的演變和未來




 工商網監
工商網監
評論