") PID控制模式以及參數(shù)調(diào)節(jié)方法!
PID控制模式以及參數(shù)調(diào)節(jié)方法!

今天我們來講講如何通過實(shí)際動態(tài)模型講解PID控制模式以及參數(shù)調(diào)節(jié)方法!
打個比方:小明接到這樣一個任務(wù),有一個水缸漏水,且漏水的速度是不定的,但要求水面高度維持在某個位置,一旦發(fā)現(xiàn)水面高度低于要求位置,就要往水缸里加水。
1
PID有哪幾種控制模式?
開始小明用瓢加水,水龍頭離水缸有十幾米的距離,經(jīng)常要跑好幾趟才加夠水,于是小明又改為用桶加,一加就是一桶,跑的次數(shù)少了,加水的速度也快了,但好幾次將缸給加溢出了,不小心弄濕了幾次鞋,小明又動腦筋,我不用瓢也不用桶,老子用盆,幾次下來,發(fā)現(xiàn)剛剛好,不用跑太多次,也不會讓水溢出。 這個檢查時間就稱為采樣周期。
開始小明用瓢加水,水龍頭離水缸有十幾米的距離,經(jīng)常要跑好幾趟才加夠水,于是小明又改為用桶加,一加就是一桶,跑的次數(shù)少了,加水的速度也快了,但好幾次將缸給加溢出了,不小心弄濕了幾次鞋,小明又動腦筋,我不用瓢也不用桶,老子用盆,幾次下來,發(fā)現(xiàn)剛剛好,不用跑太多次,也不會讓水溢出。 這個加水工具的大小就稱為比例系數(shù)。
小明又發(fā)現(xiàn)水雖然不會加過量溢出了,有時會高過要求位置比較多,還是有打濕鞋的危險。他又想了個辦法,在水缸上裝一個漏斗,每次加水不直接倒進(jìn)水缸,而是倒進(jìn)漏斗讓它慢慢加。這樣溢出的問題解決了,但加水的速度又慢了,有時還趕不上漏水的速度。于是他試著變換不同大小口徑的漏斗來控制加水的速度,最后終于找到了滿意的漏斗。漏斗的時間就稱為積分時間。
小明終于喘了一口,但任務(wù)的要求突然嚴(yán)了,水位控制的及時性要求大大提高,一旦水位過低,必須立即將水加到要求位置,而且不能高出太多,否則不給工錢。小明又為難了!于是他又開動腦筋,終于讓它想到一個辦法,常放一盆備用水在旁邊,一發(fā)現(xiàn)水位低了,不經(jīng)過漏斗就是一盆水下去,這樣及時性是保證了,但水位有時會高多了。他又在要求水面位置上面一點(diǎn)將水鑿一孔,再接一根管子到下面的備用桶里這樣多出的水會從上面的孔里漏出來。這個水漏出的快慢就稱為微分時間。
故事中小明的試驗(yàn)是一步步獨(dú)立做,但實(shí)際加水工具、漏斗口徑、溢水孔的大小同時都會影響加水的速度,水位超調(diào)量的大小,做了后面的實(shí)驗(yàn)后,往往還要修改改前面實(shí)驗(yàn)的結(jié)果。人以PID控制的方式用水壺往水杯里倒印有刻度的半杯水后停下;
設(shè)定值:水杯的半杯刻度;
實(shí)際值:水杯的實(shí)際水量;
輸出值:水壺倒出水量和水杯舀出水量;
測量:人的眼睛(相當(dāng)于傳感器)
執(zhí)行對象:人
正執(zhí)行:倒水
反執(zhí)行:舀水
1 P比例控制,就是人看到水杯里水量沒有達(dá)到水杯的半杯刻度,就按照一定水量從水壺里往水杯里倒水或者水杯的水量多過刻度,就以一定水量從水杯里舀水出來,這個一個動作可能會造成不到半杯或者多了半杯就停下來。
說明:P比例控制是一種最簡單的控制方式。其控制器的輸出與輸入誤差信號成比例關(guān)系。當(dāng)僅有比例控制時系統(tǒng)輸出存在穩(wěn)態(tài)誤差(Steady-state error)。
2 PI積分控制,就是按照一定水量往水杯里倒,如果發(fā)現(xiàn)杯里的水量沒有刻度就一直倒,后來發(fā)現(xiàn)水量超過了半杯,就從杯里往外面舀水,然后反復(fù)不夠就倒水,多了就舀水,直到水量達(dá)到刻度。
說明:在積分I控制中,控制器的輸出與輸入誤差信號的積分成正比關(guān)系。對一個自動控制系統(tǒng),如果在進(jìn)入穩(wěn)態(tài)后存在穩(wěn)態(tài)誤差,則稱這個控制系統(tǒng)是有穩(wěn)態(tài)誤差的或簡稱有差系統(tǒng)(System with Steady-state Error)。為了消除穩(wěn)態(tài)誤差,在控制器中必須引入“積分項(xiàng)”。積分項(xiàng)對誤差取決于時間的積分,隨著時間的增加,積分項(xiàng)會增大。這樣,即便誤差很小,積分項(xiàng)也會隨著時間的增加而加大,它推動控制器的輸出增大使穩(wěn)態(tài)誤差進(jìn)一步減小,直到等于零。因此,比例+積分(PI)控制器,可以使系統(tǒng)在進(jìn)入穩(wěn)態(tài)后無穩(wěn)態(tài)誤差。
3 PID微分控制,就是人的眼睛看著杯里水量和刻度的距離,當(dāng)差距很大的時候,就用水壺大水量得倒水,當(dāng)人看到水量快要接近刻度的時候,就減少水壺的得出水量,慢慢的逼近刻度,直到停留在杯中的刻度。如果最后能精確停在刻度的位置,就是無靜差控制;如果停在刻度附近,就是有靜差控制。
說明:在微分控制D中,控制器的輸出與輸入誤差信號的微分(即誤差的變化率)成正比關(guān)系。
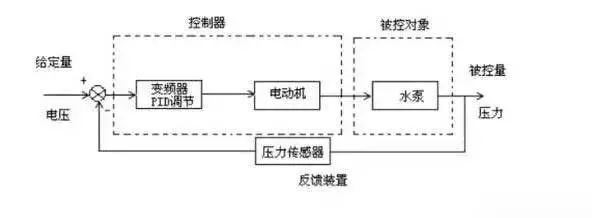
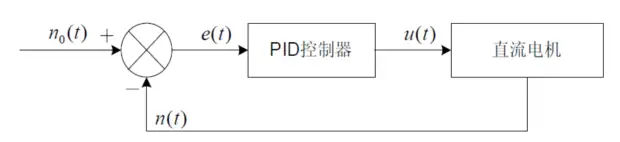
在工程實(shí)際中,應(yīng)用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡稱PID控制,又稱PID調(diào)節(jié)。PID控制器問世至今已有近70年歷史,它以其結(jié)構(gòu)簡單、穩(wěn)定性好、工作可靠、調(diào)整方便而成為工業(yè)控制的主要技術(shù)之一。當(dāng)被控對象的結(jié)構(gòu)和參數(shù)不能完全掌握,或得不到精確的數(shù)學(xué)模型時,控制理論的其它技術(shù)難以采用時,系統(tǒng)控制器的結(jié)構(gòu)和參數(shù)必須依靠經(jīng)驗(yàn)和現(xiàn)場調(diào)試來確定,這時應(yīng)用PID控制技術(shù)最為方便。即當(dāng)我們不完全了解一個系統(tǒng)和被控對象﹐或不能通過有效的測量手段來獲得系統(tǒng)參數(shù)時,最適合用PID控制技術(shù)。PID控制,實(shí)際中也有PI和PD控制。PID控制器就是根據(jù)系統(tǒng)的誤差,利用比例、積分、微分計算出控制量進(jìn)行控制的。
2
PID有哪幾個控制參數(shù)?
1 比例(P)控制
比例控制是一種最簡單的控制方式。其控制器的輸出與輸入誤差信號成比例關(guān)系。當(dāng)僅有比例控制時系統(tǒng)輸出存在穩(wěn)態(tài)誤差(Steady-state error)。
2 積分(I)控制
在積分控制中,控制器的輸出與輸入誤差信號的積分成正比關(guān)系。對一個自動控制系統(tǒng),如果在進(jìn)入穩(wěn)態(tài)后存在穩(wěn)態(tài)誤差,則稱這個控制系統(tǒng)是有穩(wěn)態(tài)誤差的或簡稱有差系統(tǒng)(System with Steady-state Error)。為了消除穩(wěn)態(tài)誤差,在控制器中必須引入“積分項(xiàng)”。積分項(xiàng)對誤差取決于時間的積分,隨著時間的增加,積分項(xiàng)會增大。這樣,即便誤差很小,積分項(xiàng)也會隨著時間的增加而加大,它推動控制器的輸出增大使穩(wěn)態(tài)誤差進(jìn)一步減小,直到等于零。因此,比例+積分(PI)控制器,可以使系統(tǒng)在進(jìn)入穩(wěn)態(tài)后無穩(wěn)態(tài)誤差。
3 微分(D)控制
在微分控制中,控制器的輸出與輸入誤差信號的微分(即誤差的變化率)成正比關(guān)系。自動控制系統(tǒng)在克服誤差的調(diào)節(jié)過程中可能會出現(xiàn)振蕩甚至失穩(wěn)。其原因是由于存在有較大慣性組件(環(huán)節(jié))或有滯后(delay)組件,具有抑制誤差的作用,其變化總是落后于誤差的變化。解決的辦法是使抑制誤差的作用的變化“超前”,即在誤差接近零時,抑制誤差的作用就應(yīng)該是零。這就是說,在控制器中僅引入“比例”項(xiàng)往往是不夠的,比例項(xiàng)的作用僅是放大誤差的幅值,而目前需要增加的是“微分項(xiàng)”,它能預(yù)測誤差變化的趨勢,這樣,具有比例+微分的控制器,就能夠提前使抑制誤差的控制作用等于零,甚至為負(fù)值,從而避免了被控量的嚴(yán)重超調(diào)。所以對有較大慣性或滯后的被控對象,比例+微分(PD)控制器能改善系統(tǒng)在調(diào)節(jié)過程中的動態(tài)特性。
在PID參數(shù)進(jìn)行整定時如果能夠有理論的方法確定PID參數(shù)當(dāng)然是最理想的方法,但是在實(shí)際的應(yīng)用中,更多的是通過湊試法來確定PID的參數(shù)。
增大比例系數(shù)P一般將加快系統(tǒng)的響應(yīng),在有靜差的情況下有利于減小靜差,但是過大的比例系數(shù)會使系統(tǒng)有比較大的超調(diào),并產(chǎn)生振蕩,使穩(wěn)定性變壞。
增大積分時間I有利于減小超調(diào),減小振蕩,使系統(tǒng)的穩(wěn)定性增加,但是系統(tǒng)靜差消除時間變長。
增大微分時間D有利于加快系統(tǒng)的響應(yīng)速度,使系統(tǒng)超調(diào)量減小,穩(wěn)定性增加,但系統(tǒng)對擾動的抑制能力減弱。
在測試時,可參考以上參數(shù)對系統(tǒng)控制過程的影響趨勢,對參數(shù)調(diào)整實(shí)行先比例、后積分,再微分的整定步驟。
3
PID參數(shù)有哪幾種整定方法?
PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計的核心內(nèi)容。它是根據(jù)被控過程的特性確定PID控制器的比例系數(shù)、積分時間和微分時間的大小。PID控制器參數(shù)整定的方法很多,概括起來有兩大類:
一是理論計算整定法。它主要是依據(jù)系統(tǒng)的數(shù)學(xué)模型,經(jīng)過理論計算確定控制器參數(shù)。這種方法所得到的計算數(shù)據(jù)未必可以直接用,還必須通過工程實(shí)際進(jìn)行調(diào)整和修改;
二是工程整定方法。它主要依賴工程經(jīng)驗(yàn),直接在控制系統(tǒng)的試驗(yàn)中進(jìn)行,且方法簡單、易于掌握,在工程實(shí)際中被廣泛采用。PID控制器參數(shù)的工程整定方法,主要有臨界比例法、反應(yīng)曲線法和衰減法。三種方法各有其特點(diǎn),其共同點(diǎn)都是通過試驗(yàn),然后按照工程經(jīng)驗(yàn)公式對控制器參數(shù)進(jìn)行整定。但無論采用哪一種方法所得到的控制器參數(shù),都需要在實(shí)際運(yùn)行中進(jìn)行最后調(diào)整與完善。
現(xiàn)在一般采用的是臨界比例法。利用該方法進(jìn)行 PID控制器參數(shù)的整定步驟如下:(1)首先預(yù)選擇一個足夠短的采樣周期讓系統(tǒng)工作;(2)僅加入比例控制環(huán)節(jié),直到系統(tǒng)對輸入的階躍響應(yīng)出現(xiàn)臨界振蕩,記下這時的比例放大系數(shù)和臨界振蕩周期;(3)在一定的控制度下通過公式計算得到PID控制器的參數(shù)。
PID參數(shù)的設(shè)定:是靠經(jīng)驗(yàn)及工藝的熟悉,參考測量值跟蹤與設(shè)定值曲線,從而調(diào)整P、I、D的大小。
常用口訣:
參數(shù)整定找最佳,從小到大順序查;
先是比例后積分,最后再把微分加;
曲線振蕩很頻繁,比例度盤要放大;
曲線漂浮繞大灣,比例度盤往小扳;
曲線偏離回復(fù)慢,積分時間往下降;
曲線波動周期長,積分時間再加長;
個人認(rèn)為PID參數(shù)的設(shè)置的大小,一方面是要根據(jù)控制對象的具體情況而定;另一方面是經(jīng)驗(yàn)。P是解決幅值震蕩,P大了會出現(xiàn)幅值震蕩的幅度大,但震蕩頻率小,系統(tǒng)達(dá)到穩(wěn)定時間長;D主要是用來克服被控對象的滯后,D大了響應(yīng)速度慢,反之則快;I是消除靜態(tài)誤差的,一般I設(shè)置都比較小,而且對系統(tǒng)影響比較小。
1 整定比例控制
將比例控制作用由小變到大,觀察各次響應(yīng),直至得到反應(yīng)快、超調(diào)小的響應(yīng)曲線。
2 整定積分環(huán)節(jié)
若在比例控制下穩(wěn)態(tài)誤差不能滿足要求,需加入積分控制。先將上面步驟中選擇的比例系數(shù)減小為原來的50~80%,再將積分時間置一個較大值,觀測響應(yīng)曲線。然后減小積分時間,加大積分作用,并相應(yīng)調(diào)整比例系數(shù),反復(fù)試湊至得到較滿意的響應(yīng),確定比例和積分的參數(shù)。
3 整定微分環(huán)節(jié)
若經(jīng)過以上步驟,PI控制只能消除穩(wěn)態(tài)誤差,而動態(tài)過程不能令人滿意,則應(yīng)加入微分控制,構(gòu)成PID控制。先置微分時間TD=0,逐漸加大TD,同時相應(yīng)地改變比例系數(shù)和積分時間,反復(fù)試湊至獲得滿意的控制效果和PID控制參數(shù)
審核編輯 :李倩
-
算法
+關(guān)注
關(guān)注
23文章
4784瀏覽量
98060 -
PID
+關(guān)注
關(guān)注
38文章
1499瀏覽量
91193
原文標(biāo)題:經(jīng)典的自動控制算法PID,大白話講解了解一下?
文章出處:【微信號:指南車機(jī)器人科技,微信公眾號:指南車機(jī)器人科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
變頻器內(nèi)置PID控制參數(shù)的含義

變頻器PID參數(shù)設(shè)置步驟

變頻器pid怎么啟用

PID控制的算法
C語言增量式PID的通用算法
請問如何優(yōu)化PID控制器的參數(shù)以實(shí)現(xiàn)快速響應(yīng)和減少超調(diào)?
怎樣理解變頻器內(nèi)置PID控制參數(shù)的含義
PID調(diào)參實(shí)用方法
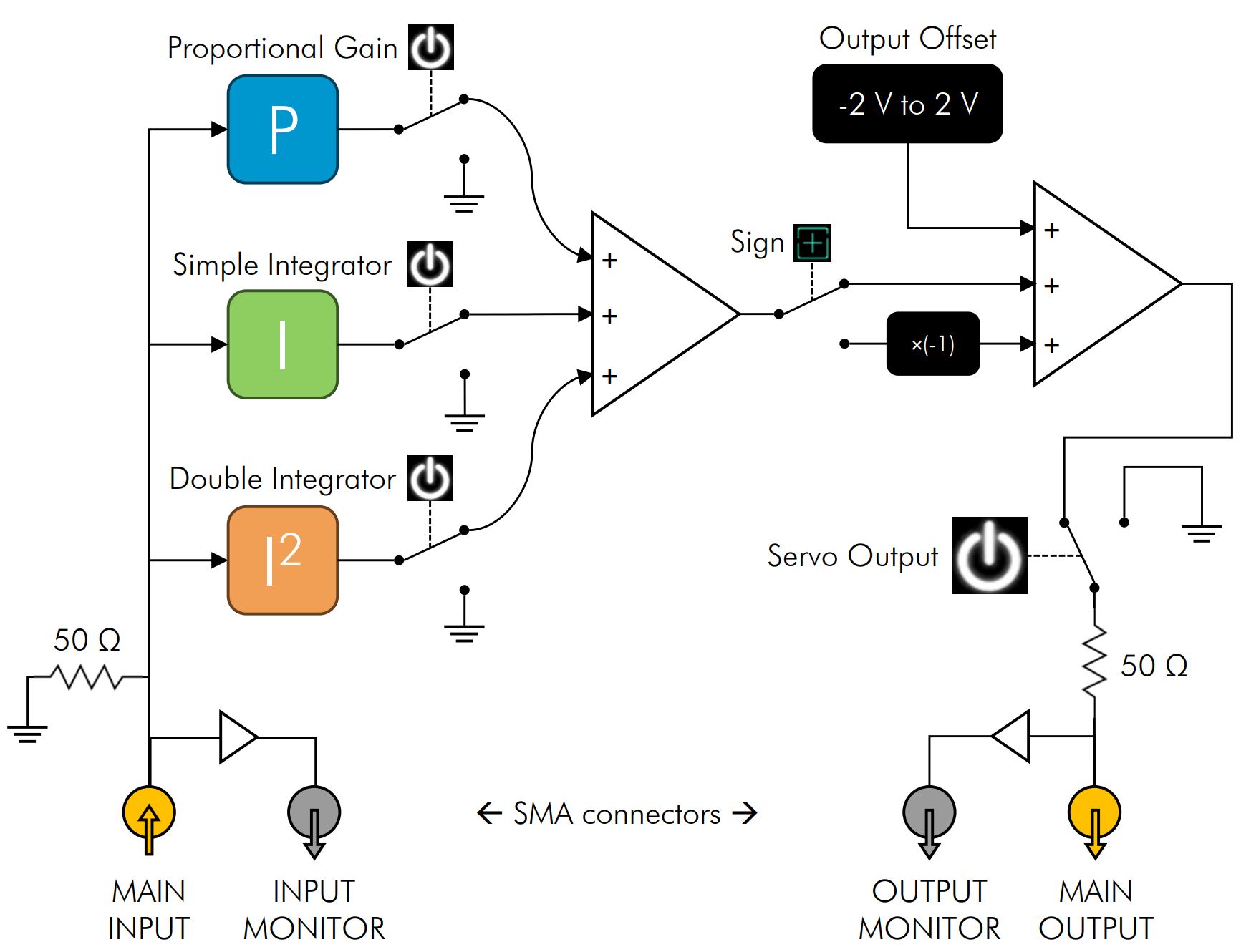
Aerodiode高帶寬激光鎖定PID控制器
CW32電機(jī)控制基礎(chǔ)——PID控制原理
變頻器參數(shù)的電流環(huán)與速度環(huán)調(diào)節(jié)方法

一步到位,Moku數(shù)字PID控制器實(shí)現(xiàn)系統(tǒng)實(shí)時調(diào)節(jié)與驗(yàn)證




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論